
IPA13 SG 057 Velocity Model.
IPA13 SG 057 Velocity Model.
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5824)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SWE Training Manual PDFDocument371 pagesSWE Training Manual PDFALBERTO OLIVEROS100% (1)
- Site Preparation and Earth WorkDocument31 pagesSite Preparation and Earth WorkGerobak Gaya100% (2)
- CE6405 Soil Mechanics Solved QB PDFDocument112 pagesCE6405 Soil Mechanics Solved QB PDFcivildept maamallanNo ratings yet
- Tutorial 02 Materials and LoadingDocument19 pagesTutorial 02 Materials and LoadingKrisna Hanjar PrastawaNo ratings yet
- HowToCreate DataDriven HorizonCube OpendTectv4.4 PDFDocument49 pagesHowToCreate DataDriven HorizonCube OpendTectv4.4 PDFKrisna Hanjar PrastawaNo ratings yet
- Tutorial 03 Non-Circular SurfacesDocument12 pagesTutorial 03 Non-Circular SurfacesKrisna Hanjar PrastawaNo ratings yet
- SSIS 2D and Multi-2D Workflow OpendTect4.4Document25 pagesSSIS 2D and Multi-2D Workflow OpendTect4.4Krisna Hanjar PrastawaNo ratings yet
- Machine Learning Tutorial PDFDocument56 pagesMachine Learning Tutorial PDFKrisna Hanjar PrastawaNo ratings yet
- HowToCreate ModelDriven HorizonCube OpendTectv4.4revDocument26 pagesHowToCreate ModelDriven HorizonCube OpendTectv4.4revKrisna Hanjar PrastawaNo ratings yet
- Automated Seismic-To-Well Ties?: Roberto Henry Herrera and Mirko Van Der BaanDocument5 pagesAutomated Seismic-To-Well Ties?: Roberto Henry Herrera and Mirko Van Der BaanKrisna Hanjar PrastawaNo ratings yet
- Introduction To HorizonCubeDocument17 pagesIntroduction To HorizonCubeKrisna Hanjar Prastawa100% (1)
- Howto Crossplot OpendtectDocument37 pagesHowto Crossplot OpendtectKrisna Hanjar PrastawaNo ratings yet
- Machine Learning Tutorial PDFDocument56 pagesMachine Learning Tutorial PDFKrisna Hanjar PrastawaNo ratings yet
- Atur Purwakala: Tugas Ujian Praktek (Sesorah) 1Document14 pagesAtur Purwakala: Tugas Ujian Praktek (Sesorah) 1Krisna Hanjar PrastawaNo ratings yet
- Tian 2010Document4 pagesTian 2010Krisna Hanjar Prastawa100% (1)
- Aplicaciones Bomba de LodosDocument6 pagesAplicaciones Bomba de LodosJosueNo ratings yet
- Croatian FlagDocument27 pagesCroatian FlagdjelleNo ratings yet
- Syllabus: ENVS 2010U: Introductory Environment ScienceDocument4 pagesSyllabus: ENVS 2010U: Introductory Environment ScienceurrougeNo ratings yet
- Lesson Plan Sea Floor SpreadingDocument7 pagesLesson Plan Sea Floor SpreadingJean RubyNo ratings yet
- Addis College PDFDocument2 pagesAddis College PDFWeldayNo ratings yet
- 0038 Foldrajz Palaeontologyda PDFDocument54 pages0038 Foldrajz Palaeontologyda PDFRamón F. Zapata Sánchez100% (1)
- Waste Rock Backfill of Open Pits: Design, Optimisation, and Modelling ConsiderationsDocument14 pagesWaste Rock Backfill of Open Pits: Design, Optimisation, and Modelling ConsiderationsAndy MonrroyNo ratings yet
- PW 344 2017 DPW Manual Volume 2-Annexures PDFDocument266 pagesPW 344 2017 DPW Manual Volume 2-Annexures PDFMichael BenhuraNo ratings yet
- Laloggia Egyptian Engineering in The Early Dynastic Period - The Sites of Saqqara and HelwanDocument22 pagesLaloggia Egyptian Engineering in The Early Dynastic Period - The Sites of Saqqara and HelwanДмитрий КукановNo ratings yet
- Zwift Routes Checklist PDFDocument2 pagesZwift Routes Checklist PDFAldemarNo ratings yet
- Environmentalscience MajorDocument6 pagesEnvironmentalscience MajorUsman FaruqueNo ratings yet
- 2019 First Quarter Test For Grade 10 2NDDocument3 pages2019 First Quarter Test For Grade 10 2NDVanna Faye DeJesusNo ratings yet
- CE6301 Engineering Geology Part A CombDocument20 pagesCE6301 Engineering Geology Part A CombElakiya RajanNo ratings yet
- Geological Time Scale and Indian Stratigraphy: Prepared By, Tony S Cheriyathu III B.Sc. GeologyDocument37 pagesGeological Time Scale and Indian Stratigraphy: Prepared By, Tony S Cheriyathu III B.Sc. GeologyMeenakshi Ashok100% (1)
- The Face of Venus The Magellan Radar-Mapping MissionDocument146 pagesThe Face of Venus The Magellan Radar-Mapping MissionBob Andrepont100% (2)
- SOIL Written ReportDocument12 pagesSOIL Written ReportYuri De VeraNo ratings yet
- Parameter For Limestone Mine OptimizationDocument24 pagesParameter For Limestone Mine OptimizationEr Manak Chand SainiNo ratings yet
- Oil 1Document1 pageOil 1Edwin ZachariaNo ratings yet
- Agrohydrology ManualDocument113 pagesAgrohydrology Manualjoverevocal50% (2)
- Mining FolderDocument1 pageMining FolderAnonymous KbM6WrPzNo ratings yet
- Sequence-stratigraphic controls on complex reservoir architecture of highstand fluvial-dominated deltaic and lowstand valley-fill depositsin the Upper Cretaceous(Cenomanian) WoodbineGroup, East Texas field:Regional and local perspectives: William A. Ambrose, Tucker F. Hentz,Florence Bonnaffe´, Robert G. Loucks,L. Frank Brown Jr., Fred P. Wang, and Eric C. PotterDocument39 pagesSequence-stratigraphic controls on complex reservoir architecture of highstand fluvial-dominated deltaic and lowstand valley-fill depositsin the Upper Cretaceous(Cenomanian) WoodbineGroup, East Texas field:Regional and local perspectives: William A. Ambrose, Tucker F. Hentz,Florence Bonnaffe´, Robert G. Loucks,L. Frank Brown Jr., Fred P. Wang, and Eric C. Potterrzelaya123No ratings yet
- WaiverDocument4 pagesWaiverCristine LecNo ratings yet
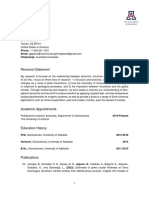
- Jepson CV Personal StatementDocument11 pagesJepson CV Personal Statementapi-482951319No ratings yet
- CSM ProfessorsDocument16 pagesCSM ProfessorsGary McKayNo ratings yet
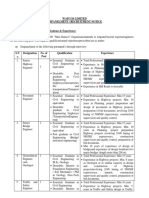
- Wapcos Limited Empanelment / Recruitment NoticeDocument8 pagesWapcos Limited Empanelment / Recruitment NoticeSantosh ReddyNo ratings yet
- The Geology of Indonesia - Sumatra GEODocument16 pagesThe Geology of Indonesia - Sumatra GEOGeovánio Pedro Silva AlmeidaNo ratings yet
- Panna Diamond Belt, Madhya Pradesh - A Critical ReveiwDocument16 pagesPanna Diamond Belt, Madhya Pradesh - A Critical ReveiwDeepak KesharwaniNo ratings yet
















































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5824)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SWE Training Manual PDFDocument371 pagesSWE Training Manual PDFALBERTO OLIVEROS100% (1)
- Site Preparation and Earth WorkDocument31 pagesSite Preparation and Earth WorkGerobak Gaya100% (2)
- CE6405 Soil Mechanics Solved QB PDFDocument112 pagesCE6405 Soil Mechanics Solved QB PDFcivildept maamallanNo ratings yet
- Tutorial 02 Materials and LoadingDocument19 pagesTutorial 02 Materials and LoadingKrisna Hanjar PrastawaNo ratings yet
- HowToCreate DataDriven HorizonCube OpendTectv4.4 PDFDocument49 pagesHowToCreate DataDriven HorizonCube OpendTectv4.4 PDFKrisna Hanjar PrastawaNo ratings yet
- Tutorial 03 Non-Circular SurfacesDocument12 pagesTutorial 03 Non-Circular SurfacesKrisna Hanjar PrastawaNo ratings yet
- SSIS 2D and Multi-2D Workflow OpendTect4.4Document25 pagesSSIS 2D and Multi-2D Workflow OpendTect4.4Krisna Hanjar PrastawaNo ratings yet
- Machine Learning Tutorial PDFDocument56 pagesMachine Learning Tutorial PDFKrisna Hanjar PrastawaNo ratings yet
- HowToCreate ModelDriven HorizonCube OpendTectv4.4revDocument26 pagesHowToCreate ModelDriven HorizonCube OpendTectv4.4revKrisna Hanjar PrastawaNo ratings yet
- Automated Seismic-To-Well Ties?: Roberto Henry Herrera and Mirko Van Der BaanDocument5 pagesAutomated Seismic-To-Well Ties?: Roberto Henry Herrera and Mirko Van Der BaanKrisna Hanjar PrastawaNo ratings yet
- Introduction To HorizonCubeDocument17 pagesIntroduction To HorizonCubeKrisna Hanjar Prastawa100% (1)
- Howto Crossplot OpendtectDocument37 pagesHowto Crossplot OpendtectKrisna Hanjar PrastawaNo ratings yet
- Machine Learning Tutorial PDFDocument56 pagesMachine Learning Tutorial PDFKrisna Hanjar PrastawaNo ratings yet
- Atur Purwakala: Tugas Ujian Praktek (Sesorah) 1Document14 pagesAtur Purwakala: Tugas Ujian Praktek (Sesorah) 1Krisna Hanjar PrastawaNo ratings yet
- Tian 2010Document4 pagesTian 2010Krisna Hanjar Prastawa100% (1)
- Aplicaciones Bomba de LodosDocument6 pagesAplicaciones Bomba de LodosJosueNo ratings yet
- Croatian FlagDocument27 pagesCroatian FlagdjelleNo ratings yet
- Syllabus: ENVS 2010U: Introductory Environment ScienceDocument4 pagesSyllabus: ENVS 2010U: Introductory Environment ScienceurrougeNo ratings yet
- Lesson Plan Sea Floor SpreadingDocument7 pagesLesson Plan Sea Floor SpreadingJean RubyNo ratings yet
- Addis College PDFDocument2 pagesAddis College PDFWeldayNo ratings yet
- 0038 Foldrajz Palaeontologyda PDFDocument54 pages0038 Foldrajz Palaeontologyda PDFRamón F. Zapata Sánchez100% (1)
- Waste Rock Backfill of Open Pits: Design, Optimisation, and Modelling ConsiderationsDocument14 pagesWaste Rock Backfill of Open Pits: Design, Optimisation, and Modelling ConsiderationsAndy MonrroyNo ratings yet
- PW 344 2017 DPW Manual Volume 2-Annexures PDFDocument266 pagesPW 344 2017 DPW Manual Volume 2-Annexures PDFMichael BenhuraNo ratings yet
- Laloggia Egyptian Engineering in The Early Dynastic Period - The Sites of Saqqara and HelwanDocument22 pagesLaloggia Egyptian Engineering in The Early Dynastic Period - The Sites of Saqqara and HelwanДмитрий КукановNo ratings yet
- Zwift Routes Checklist PDFDocument2 pagesZwift Routes Checklist PDFAldemarNo ratings yet
- Environmentalscience MajorDocument6 pagesEnvironmentalscience MajorUsman FaruqueNo ratings yet
- 2019 First Quarter Test For Grade 10 2NDDocument3 pages2019 First Quarter Test For Grade 10 2NDVanna Faye DeJesusNo ratings yet
- CE6301 Engineering Geology Part A CombDocument20 pagesCE6301 Engineering Geology Part A CombElakiya RajanNo ratings yet
- Geological Time Scale and Indian Stratigraphy: Prepared By, Tony S Cheriyathu III B.Sc. GeologyDocument37 pagesGeological Time Scale and Indian Stratigraphy: Prepared By, Tony S Cheriyathu III B.Sc. GeologyMeenakshi Ashok100% (1)
- The Face of Venus The Magellan Radar-Mapping MissionDocument146 pagesThe Face of Venus The Magellan Radar-Mapping MissionBob Andrepont100% (2)
- SOIL Written ReportDocument12 pagesSOIL Written ReportYuri De VeraNo ratings yet
- Parameter For Limestone Mine OptimizationDocument24 pagesParameter For Limestone Mine OptimizationEr Manak Chand SainiNo ratings yet
- Oil 1Document1 pageOil 1Edwin ZachariaNo ratings yet
- Agrohydrology ManualDocument113 pagesAgrohydrology Manualjoverevocal50% (2)
- Mining FolderDocument1 pageMining FolderAnonymous KbM6WrPzNo ratings yet
- Sequence-stratigraphic controls on complex reservoir architecture of highstand fluvial-dominated deltaic and lowstand valley-fill depositsin the Upper Cretaceous(Cenomanian) WoodbineGroup, East Texas field:Regional and local perspectives: William A. Ambrose, Tucker F. Hentz,Florence Bonnaffe´, Robert G. Loucks,L. Frank Brown Jr., Fred P. Wang, and Eric C. PotterDocument39 pagesSequence-stratigraphic controls on complex reservoir architecture of highstand fluvial-dominated deltaic and lowstand valley-fill depositsin the Upper Cretaceous(Cenomanian) WoodbineGroup, East Texas field:Regional and local perspectives: William A. Ambrose, Tucker F. Hentz,Florence Bonnaffe´, Robert G. Loucks,L. Frank Brown Jr., Fred P. Wang, and Eric C. Potterrzelaya123No ratings yet
- WaiverDocument4 pagesWaiverCristine LecNo ratings yet
- Jepson CV Personal StatementDocument11 pagesJepson CV Personal Statementapi-482951319No ratings yet
- CSM ProfessorsDocument16 pagesCSM ProfessorsGary McKayNo ratings yet
- Wapcos Limited Empanelment / Recruitment NoticeDocument8 pagesWapcos Limited Empanelment / Recruitment NoticeSantosh ReddyNo ratings yet
- The Geology of Indonesia - Sumatra GEODocument16 pagesThe Geology of Indonesia - Sumatra GEOGeovánio Pedro Silva AlmeidaNo ratings yet
- Panna Diamond Belt, Madhya Pradesh - A Critical ReveiwDocument16 pagesPanna Diamond Belt, Madhya Pradesh - A Critical ReveiwDeepak KesharwaniNo ratings yet