Download as pdf or txt
You might also like
- MF52 EquationManualDocument41 pagesMF52 EquationManualFelipe100% (1)
- Bajaj Chetak Electric ScooterDocument10 pagesBajaj Chetak Electric Scootergayatri malvadkar57% (7)
- The Basic Nature of Vehicle Understeer-OversteerDocument36 pagesThe Basic Nature of Vehicle Understeer-OversteerRTCNNo ratings yet
- Guide to Load Analysis for Durability in Vehicle EngineeringFrom EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonRating: 4 out of 5 stars4/5 (1)
- 318 Ho Abc (DPS) 03-06-02Document20 pages318 Ho Abc (DPS) 03-06-02arkhom1100% (1)
- Scania Technical Data - Issue-13Document51 pagesScania Technical Data - Issue-13kman548100% (1)
- All You Need To Know About Differentials PDFDocument107 pagesAll You Need To Know About Differentials PDFJay100% (1)
- 2011 REV SAE Suspension Kiszco PDFDocument112 pages2011 REV SAE Suspension Kiszco PDFRushik KudaleNo ratings yet
- AC Worksheet v016Document82 pagesAC Worksheet v016Игорь БелецкийNo ratings yet
- Developments of A Method For Lap Time SimulationDocument7 pagesDevelopments of A Method For Lap Time SimulationRodrigo Bob100% (1)
- Cosworth Data Bytes Live - Pi Toolbox v0 8Document41 pagesCosworth Data Bytes Live - Pi Toolbox v0 8Guilherme PfeilstickerNo ratings yet
- TP31201-1 700 Multi-Link Rear SuspensionDocument42 pagesTP31201-1 700 Multi-Link Rear Suspensionvanapeer100% (1)
- Sae Technical Paper Series: Lonny L. Thompson, Jon K. Lampert and E. Harry LawDocument12 pagesSae Technical Paper Series: Lonny L. Thompson, Jon K. Lampert and E. Harry LawSrikanth SridharanNo ratings yet
- Using Pacejka '89 and '94 ModelsDocument30 pagesUsing Pacejka '89 and '94 ModelsboopsubhaNo ratings yet
- Motor Cummins Nta855g5 PDFDocument2 pagesMotor Cummins Nta855g5 PDFJohn Garnet0% (1)
- Drenth Display Unit USB Manual 2013-5Document20 pagesDrenth Display Unit USB Manual 2013-5Lucas Nicolás MartinezNo ratings yet
- Optimumt Product Description: Key FeaturesDocument6 pagesOptimumt Product Description: Key FeaturesPierre LalsingNo ratings yet
- Effect of The Tire Lateral Force Saturation On Stability Control of 4WDEV SteeringDocument5 pagesEffect of The Tire Lateral Force Saturation On Stability Control of 4WDEV SteeringBerkay ÇelikNo ratings yet
- Math (F5) - Gradient and Area Under A GraphDocument26 pagesMath (F5) - Gradient and Area Under A GraphRoszelan MajidNo ratings yet
- SAE Mini BAJA: Suspension and Steering: Concept GenerationDocument16 pagesSAE Mini BAJA: Suspension and Steering: Concept GenerationPrashant DubeyNo ratings yet
- Tire-Road Friction CoefficientDocument11 pagesTire-Road Friction CoefficientAnonymous Hy5Ir9QXNo ratings yet
- Suspension Analyzer ManualDocument156 pagesSuspension Analyzer ManualSankalp SharmaNo ratings yet
- Analysis of Davis Steering Gear Mechanism For Four Wheels and Six WheelsDocument5 pagesAnalysis of Davis Steering Gear Mechanism For Four Wheels and Six WheelsIJIRSTNo ratings yet
- Vehicle Suspension Modeling NotesDocument25 pagesVehicle Suspension Modeling Notesahmetlutfu100% (2)
- OptimumLap Getting StartedDocument17 pagesOptimumLap Getting StartedAyushNo ratings yet
- Análise de Um Veículo em YAWDocument3 pagesAnálise de Um Veículo em YAWLeonardo ColpoNo ratings yet
- Suspension Design ReportDocument4 pagesSuspension Design ReportMeet MehtaNo ratings yet
- Tyre Report SampleDocument5 pagesTyre Report SampleArka PatraNo ratings yet
- 2014 FSAE Structural Equivalency Spreadsheet V1.2Document103 pages2014 FSAE Structural Equivalency Spreadsheet V1.2Homer SilvaNo ratings yet
- FSAE Data Analysis Day 2 To PrintDocument55 pagesFSAE Data Analysis Day 2 To PrintJorge CorderoNo ratings yet
- The Role of The Moving Ground For Automotive Wind Tunnel Testing On Race CarsDocument10 pagesThe Role of The Moving Ground For Automotive Wind Tunnel Testing On Race CarsVyssionNo ratings yet
- Ackermann Steering For Performance Race Cars PDFDocument22 pagesAckermann Steering For Performance Race Cars PDFr2d23No ratings yet
- Tire ModelsDocument274 pagesTire Modelsdebendra128nitrNo ratings yet
- Rfactor Calculation InstructionsDocument6 pagesRfactor Calculation InstructionsACTRNo ratings yet
- Development and Experimental Verification of A Parametric Model of An Automotive DamperDocument126 pagesDevelopment and Experimental Verification of A Parametric Model of An Automotive DamperMrudula Amar WardeNo ratings yet
- Team Teaching Presentation How Car Suspension WorksDocument17 pagesTeam Teaching Presentation How Car Suspension Worksmsaad19103564No ratings yet
- Chapter 1 IntroductonDocument20 pagesChapter 1 IntroductonViet Hung NguyenNo ratings yet
- CG Height Calculator - Automotive Brake System Calculator - BRAKE POWERDocument2 pagesCG Height Calculator - Automotive Brake System Calculator - BRAKE POWERAnonymous QiMB2lBCJLNo ratings yet
- FSAE Tutorial v1.1Document17 pagesFSAE Tutorial v1.1Abhinav GaikwadNo ratings yet
- Steer Angles, Ackerman and Tire Slip Angles PDFDocument12 pagesSteer Angles, Ackerman and Tire Slip Angles PDFGeforceCudaNo ratings yet
- Brake Design 2Document3 pagesBrake Design 2Aakash SharmaNo ratings yet
- Spring Rates Roll Centers and HandlingDocument9 pagesSpring Rates Roll Centers and HandlingfizznitNo ratings yet
- RCE4Document3 pagesRCE4Ketan JainNo ratings yet
- 1RV18ME008Document21 pages1RV18ME008FOODIE USNo ratings yet
- A Tool For Lap Time Simulation PDFDocument5 pagesA Tool For Lap Time Simulation PDFRodrigo BobNo ratings yet
- Slip Angle Explained Race Logic PDFDocument8 pagesSlip Angle Explained Race Logic PDFyeshwantambureNo ratings yet
- MPC Based Yaw and Lateral Stabilisation Via Active Front Steering and Braking PDFDocument19 pagesMPC Based Yaw and Lateral Stabilisation Via Active Front Steering and Braking PDFKiran KoneNo ratings yet
- Porsche Chassis DevelopmentDocument18 pagesPorsche Chassis DevelopmentArif OthmanNo ratings yet
- Steering Geometry AnglesDocument12 pagesSteering Geometry AnglesMohit RanaNo ratings yet
- Force Based Roll CentersDocument6 pagesForce Based Roll Centersnick944100% (1)
- Integration of Magic Formula Tire Model With Vehicle Handling ModelDocument7 pagesIntegration of Magic Formula Tire Model With Vehicle Handling ModelFabio Bazakas ZetolaNo ratings yet
- Double WishboneDocument6 pagesDouble WishboneRian SteveNo ratings yet
- Aerodynamics of CarsDocument20 pagesAerodynamics of CarspippopipoNo ratings yet
- Brakes Analysis of BAJA ATVDocument4 pagesBrakes Analysis of BAJA ATVInfogain publication100% (3)
- 5245-New Valve Technologies Brochure-9.12Document5 pages5245-New Valve Technologies Brochure-9.12Derrick ChongNo ratings yet
- Design of Formula Student Race Car Chassis: Alperen KaleDocument26 pagesDesign of Formula Student Race Car Chassis: Alperen KaleAjay bhosaleNo ratings yet
- Porsche Cars: Facts Everyone Should Know About Porsche 64, Porsche 914 and MoreFrom EverandPorsche Cars: Facts Everyone Should Know About Porsche 64, Porsche 914 and MoreNo ratings yet
- Plug-In Hybrid Electric Vehicles The Ultimate Step-By-Step GuideFrom EverandPlug-In Hybrid Electric Vehicles The Ultimate Step-By-Step GuideNo ratings yet
- PPMDocument12 pagesPPMajaymalhotra15No ratings yet
- Hotchkis TVS InstallDocument15 pagesHotchkis TVS Install0vipraNo ratings yet
- Core CompetenciesDocument56 pagesCore CompetenciesPaul Senen Didulo100% (1)
- F 002 A2z A08Document2 pagesF 002 A2z A08Md sufiyan aalamNo ratings yet
- 194-210 CSG649Document107 pages194-210 CSG649IV FVNo ratings yet
- 2024-02-14 1818 Auto ExpressDocument84 pages2024-02-14 1818 Auto ExpressMihaly ValasikNo ratings yet
- CPC-Service Manual MVP Rev01Document69 pagesCPC-Service Manual MVP Rev01Carlos SolisNo ratings yet
- FX481V FX541V FX600V: Owner'S ManualDocument43 pagesFX481V FX541V FX600V: Owner'S Manualcraig fisherNo ratings yet
- Service Manual - Suzuki FZ50Document141 pagesService Manual - Suzuki FZ50Ramon SeguésNo ratings yet
- Controil 2018 PDFDocument408 pagesControil 2018 PDFwilmerNo ratings yet
- NHTSA Closes Tesla InvestigationDocument2 pagesNHTSA Closes Tesla InvestigationotteromNo ratings yet
- The 1901 Locomobile: Long Wheelbase RunaboutDocument11 pagesThe 1901 Locomobile: Long Wheelbase Runaboutjorge Angel LopeNo ratings yet
- Cdm843 Wheel Loader - (Weichai Deutz) Engin...Document1 pageCdm843 Wheel Loader - (Weichai Deutz) Engin...Yodi Eko PrasetyoNo ratings yet
- C-15 Electronic Unit Injector - AdjustDocument4 pagesC-15 Electronic Unit Injector - AdjustCEVegaONo ratings yet
- Kicks BrochureDocument12 pagesKicks Brochureadriankriztonocampo11No ratings yet
- Engine d85ss 2 S6d125e 2gDocument127 pagesEngine d85ss 2 S6d125e 2gGayuh PranataNo ratings yet
- API Engine Oil ClassificationDocument3 pagesAPI Engine Oil Classificationdennis castillo quinteroNo ratings yet
- Cars - Transmission New Automatic Transmission 722.9 NAG2 (7-Speed) Diagnosis, Repair Advanced TrainingDocument60 pagesCars - Transmission New Automatic Transmission 722.9 NAG2 (7-Speed) Diagnosis, Repair Advanced TrainingTuấn Neo100% (1)
- Tài Liệu Tra Cứu Chân IC Đánh LửaDocument102 pagesTài Liệu Tra Cứu Chân IC Đánh LửaVinh XuânNo ratings yet
- Performance Driving Illustrated Ebook Ross Bentley 1Document47 pagesPerformance Driving Illustrated Ebook Ross Bentley 1Andres Elias Balza100% (1)
- Fuel Supply SystemDocument56 pagesFuel Supply Systemmkisa70No ratings yet
- VHM CatalogusDocument94 pagesVHM CatalogusRamsi A. HNo ratings yet
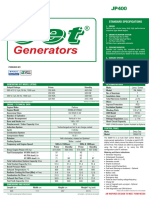
- JP400Document2 pagesJP400Sirwan Mustafa (Albajalan)No ratings yet
- Homework 3 Vehicle Performance Solutions - Updated 09-20-2018Document2 pagesHomework 3 Vehicle Performance Solutions - Updated 09-20-2018Xavier BuenoNo ratings yet
- Final Drawings Yanmar 6EY26WDocument177 pagesFinal Drawings Yanmar 6EY26Wjosch90210100% (2)
- Truck Body and Special Equipment Installation Procedure and PrecautionsDocument32 pagesTruck Body and Special Equipment Installation Procedure and PrecautionskidskungNo ratings yet