Download as doc, pdf, or txt
You might also like
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 4 out of 5 stars4/5 (4)
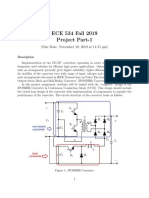
- ECE 534 Project 1 F19Document6 pagesECE 534 Project 1 F19JAY CHHEDANo ratings yet
- l24 PDFDocument27 pagesl24 PDFAshok KumarNo ratings yet
- Computer Modeling and Simulation of PWM Converter CircuitsDocument27 pagesComputer Modeling and Simulation of PWM Converter CircuitsskrtamilNo ratings yet
- Cw1 (Part1) BriefDocument3 pagesCw1 (Part1) Briefoussama sadkiNo ratings yet
- USC PESC04 PHIL Power Interface Final PDFDocument5 pagesUSC PESC04 PHIL Power Interface Final PDFMalik MilakNo ratings yet
- Flyback ConverterDocument19 pagesFlyback Convertergpalencia_1No ratings yet
- DSP Based Real Time Implementation of AC-DC-AC Converter Using SPWM TechniqueDocument18 pagesDSP Based Real Time Implementation of AC-DC-AC Converter Using SPWM Techniquebalamurugan041992No ratings yet
- Digital Power-Conversion For The Analog EngineerDocument12 pagesDigital Power-Conversion For The Analog EngineerfjwoemcuNo ratings yet
- EE 392: Control Systems & Their Components: Lab 2: DC Motor Speed: Frequency Domain Methods For Controller DesignDocument4 pagesEE 392: Control Systems & Their Components: Lab 2: DC Motor Speed: Frequency Domain Methods For Controller DesignAbdalla FathyNo ratings yet
- AnalogDocument8 pagesAnalogAhmed F RahimNo ratings yet
- UPS SystemDocument4 pagesUPS Systemमृत्युंजय झाNo ratings yet
- Pscad ModelingDocument21 pagesPscad ModelingSumith Wellawa100% (1)
- 2011 NotesDocument58 pages2011 Notesmokorieboy100% (1)
- A Method For Constructing Reduced Order Transformer Models For System Studies From Detailed Lumped Parameter Models Ml12088a497Document7 pagesA Method For Constructing Reduced Order Transformer Models For System Studies From Detailed Lumped Parameter Models Ml12088a497cristian1961No ratings yet
- Ntroduction: Fig.1. Principle Block DiagramDocument4 pagesNtroduction: Fig.1. Principle Block Diagramanant0008No ratings yet
- MATLAB-based Simulation of Three-Level PWM Inverter-Fed Motor Speed Control SystemDocument6 pagesMATLAB-based Simulation of Three-Level PWM Inverter-Fed Motor Speed Control Systemraviraj_kumbhar1988No ratings yet
- 1405 0087v1 PDFDocument18 pages1405 0087v1 PDFSteve TranNo ratings yet
- Validation of A 60-Level Modular Multilevel Converter Model - Overview of Offline and Real-Time HIL Testing and ResultsDocument6 pagesValidation of A 60-Level Modular Multilevel Converter Model - Overview of Offline and Real-Time HIL Testing and Resultsதமிழன்No ratings yet
- Inversor Trifasico en MatlabDocument6 pagesInversor Trifasico en MatlabAngel Arturo Castellanos SantamariaNo ratings yet
- UPS SystemDocument4 pagesUPS SystemMadhu JbNo ratings yet
- A Matlab / Simulink Based Tool For Power Electronic CircuitsDocument6 pagesA Matlab / Simulink Based Tool For Power Electronic CircuitstatacpsNo ratings yet
- A Matlahsimulink Tool For Power Converters Teaching A Power FacDocument5 pagesA Matlahsimulink Tool For Power Converters Teaching A Power FacRAJAN M SNo ratings yet
- Basic Matrix ConverterDocument6 pagesBasic Matrix ConverterSaranya MenonNo ratings yet
- Application of MATLAB SIMULINK and PSPICE Simulation in Teaching Power Electronics and Electric Drive SystemDocument5 pagesApplication of MATLAB SIMULINK and PSPICE Simulation in Teaching Power Electronics and Electric Drive SystemRaghava KatreepalliNo ratings yet
- A Static Compensator Model For Use With Electromagnetic Transients Simulation ProgramsDocument10 pagesA Static Compensator Model For Use With Electromagnetic Transients Simulation ProgramsjeffguitarNo ratings yet
- (Doi 10.1201/9781315316246-2) Perelmuter, Viktor - Renewable Energy Systems (Simulation With Simulink® and SimPowerSystems™) - Chapter 1 SimPowerSystems™ ModelsDocument14 pages(Doi 10.1201/9781315316246-2) Perelmuter, Viktor - Renewable Energy Systems (Simulation With Simulink® and SimPowerSystems™) - Chapter 1 SimPowerSystems™ ModelsTheodore Teddy J100% (1)
- Non-Linear Predictive Control of A DC-to-DC ConverterDocument5 pagesNon-Linear Predictive Control of A DC-to-DC ConvertermenguemengueNo ratings yet
- DC-DC Voltage ConverterDocument14 pagesDC-DC Voltage ConverterasifNo ratings yet
- HVDC VSC 2L BenchmarkDocument7 pagesHVDC VSC 2L BenchmarkRavi VermaNo ratings yet
- Digital Simulation of Power Systems and Power Electronics Using The MATLAB-Simulink Power System BlocksetDocument10 pagesDigital Simulation of Power Systems and Power Electronics Using The MATLAB-Simulink Power System Blocksetehoangvan100% (1)
- Electrical Simulation Lab ObjectiveDocument2 pagesElectrical Simulation Lab ObjectiverijilpoothadiNo ratings yet
- PSPICE Simulation of Three-Phase Inverters by Means of Swiching Functions (Salazar Joós)Document8 pagesPSPICE Simulation of Three-Phase Inverters by Means of Swiching Functions (Salazar Joós)luism_falconiNo ratings yet
- Pesc99 SeminarDocument169 pagesPesc99 SeminarnikolakaNo ratings yet
- Small-Signal Modeling of Digitally Controlled Grid-Connected Inverters With FiltersDocument14 pagesSmall-Signal Modeling of Digitally Controlled Grid-Connected Inverters With FiltersTravis GrayNo ratings yet
- Low Power Design of Digital SystemsDocument28 pagesLow Power Design of Digital SystemssuperECENo ratings yet
- ECE462 Motor Lab Experiment5Document14 pagesECE462 Motor Lab Experiment5Maverick NaiduNo ratings yet
- PCIM2001 Stack DevelopmentDocument6 pagesPCIM2001 Stack DevelopmentNishith DhinoraNo ratings yet
- Aditi Edc FileDocument54 pagesAditi Edc Filedamanpreetk.ee.20No ratings yet
- Buck Boost Converter Small Signal Model Dynamic Analysis Under System Uncertainties PDFDocument13 pagesBuck Boost Converter Small Signal Model Dynamic Analysis Under System Uncertainties PDFTariq KhanNo ratings yet
- Chapter 6Document42 pagesChapter 6Henry MaedaNo ratings yet
- Behavioral Model of Pipeline Adc by Using SimulinkrDocument5 pagesBehavioral Model of Pipeline Adc by Using SimulinkrSounakDuttaNo ratings yet
- Experiment No 3 PI Current Control of DC MotorDocument3 pagesExperiment No 3 PI Current Control of DC MotorMohammed Dyhia Ali100% (1)
- Lab3 r1Document2 pagesLab3 r1Anteneh AmsaluNo ratings yet
- MATLAB Co-Simulation Tools For Power Supply Systems Design: V. Boscaino, G. CapponiDocument4 pagesMATLAB Co-Simulation Tools For Power Supply Systems Design: V. Boscaino, G. CapponivboscainoNo ratings yet
- Line Differential Protection Scheme Modelling (PDF Library)Document6 pagesLine Differential Protection Scheme Modelling (PDF Library)Nirmal RajaNo ratings yet
- Experiment # 10Document5 pagesExperiment # 10Hafeez AliNo ratings yet
- Digital-to-Analogue Conversion: PHY 406F - Microprocessor Interfacing TechniquesDocument14 pagesDigital-to-Analogue Conversion: PHY 406F - Microprocessor Interfacing TechniquesMalou Ruiz DenolanNo ratings yet
- HIL WorkshopDocument35 pagesHIL WorkshopBOUZ2010No ratings yet
- A Mosfet-Only Dac For A General Array Configured Device: E. Montane, G. Hornero, G. Chapinal, J. SamitierDocument5 pagesA Mosfet-Only Dac For A General Array Configured Device: E. Montane, G. Hornero, G. Chapinal, J. SamitierMiguel BrunoNo ratings yet
- Matlab Simulink As Simulation Tool For Wind Generation Systems Based On Doubly Fed Induction MachinesDocument22 pagesMatlab Simulink As Simulation Tool For Wind Generation Systems Based On Doubly Fed Induction MachinesAchraf BourassNo ratings yet
- Modeling of DC DC Converter PDFDocument6 pagesModeling of DC DC Converter PDFVishal AryaNo ratings yet
- Simulasi MatlabDocument4 pagesSimulasi MatlabNurrachmanSukhoMahadyNo ratings yet
- Design and Analysis of Two-Stage Operational Transconductance Amplifier (OTA) Using Cadence ToolDocument5 pagesDesign and Analysis of Two-Stage Operational Transconductance Amplifier (OTA) Using Cadence Toolrahul singhNo ratings yet
- Modelling and Simulation of A DC Motor DriveDocument12 pagesModelling and Simulation of A DC Motor DriveMi HoangNo ratings yet
- Power Systems-On-Chip: Practical Aspects of DesignFrom EverandPower Systems-On-Chip: Practical Aspects of DesignBruno AllardNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Advanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesFrom EverandAdvanced Control of AC / DC Power Networks: System of Systems Approach Based on Spatio-temporal ScalesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Staff Data Format-AUCDocument1 pageStaff Data Format-AUCSenthil KumarNo ratings yet
- ADSS StandardDocument17 pagesADSS StandardHedi HmidaNo ratings yet
- Lecture 1 Part 1Document13 pagesLecture 1 Part 1Marianna KlosNo ratings yet
- Lab ReportpdfDocument7 pagesLab ReportpdfStefano FochesattoNo ratings yet
- Practical Research 2: Data Gathering ProceduresDocument8 pagesPractical Research 2: Data Gathering ProceduresJosua GarciaNo ratings yet
- Earth Dams Foundation & Earth Material InvestigationDocument111 pagesEarth Dams Foundation & Earth Material Investigationmustafurade1No ratings yet
- Transducer Engineering Lab ManualDocument44 pagesTransducer Engineering Lab Manualspgmaniarunagiri100% (2)
- Physics Lab Heat and HumidityDocument3 pagesPhysics Lab Heat and HumidityLAUREN YAPNo ratings yet
- Measurement GER NER GPI - Version 1.0Document8 pagesMeasurement GER NER GPI - Version 1.0Wouter RijneveldNo ratings yet
- Razones de CambioDocument1 pageRazones de CambioCarlos FloresNo ratings yet
- Resume of Noah C.D. HillDocument3 pagesResume of Noah C.D. HillNoah (AmericanGuy)No ratings yet
- Planificare Calendaristică Anuală Pentru Limba Modernă 1 - Studiu Intensiv. Engleză. Clasa A Vi-ADocument6 pagesPlanificare Calendaristică Anuală Pentru Limba Modernă 1 - Studiu Intensiv. Engleză. Clasa A Vi-Acatalina marinoiuNo ratings yet
- Refrigerant Changeover Guidelines CFC-12 To R-401ADocument7 pagesRefrigerant Changeover Guidelines CFC-12 To R-401AMaria DazaNo ratings yet
- 03 Molar Volume of A Gas Long ReportDocument5 pages03 Molar Volume of A Gas Long ReportHoomehr TayariyanNo ratings yet
- Mick Thomson's Guitars and GearDocument10 pagesMick Thomson's Guitars and GearAleksandar LjubinkovicNo ratings yet
- Fallacies of Defective Induction 2Document29 pagesFallacies of Defective Induction 2Paul Romualdez Tan100% (1)
- Ims555 Grouping Assignment (Ai Deepfakes)Document23 pagesIms555 Grouping Assignment (Ai Deepfakes)NUR A'ISYAH AZIZINo ratings yet
- Work Inspection Checklist: Project DetailsDocument1 pageWork Inspection Checklist: Project Detailsmark lester caluzaNo ratings yet
- rx330 Gasoline 106Document2 pagesrx330 Gasoline 106Андрей СилаевNo ratings yet
- Bread Board - Transformer - PCB - Soldering - LectureDocument31 pagesBread Board - Transformer - PCB - Soldering - Lectureananyautkarsh140904No ratings yet
- LISI AEROSPACE - PULL-STEM™ and PULL-IN™ PinsDocument6 pagesLISI AEROSPACE - PULL-STEM™ and PULL-IN™ PinsLeandro González De CeccoNo ratings yet
- Manas Arora 3 Year - B Roll No. 3 Vastu Kala AcademyDocument12 pagesManas Arora 3 Year - B Roll No. 3 Vastu Kala AcademyManasAroraNo ratings yet
- Chapter 9: TidesDocument40 pagesChapter 9: TidesCarol GirottoNo ratings yet
- En0389 (Utilities Ii) PDFDocument127 pagesEn0389 (Utilities Ii) PDFGabriel GabrielNo ratings yet
- "Twist Off" Type Tension Control Structural Bolt/Nut/Washer Assemblies, Steel, Heat Treated, 120/105 Ksi Minimum Tensile StrengthDocument8 pages"Twist Off" Type Tension Control Structural Bolt/Nut/Washer Assemblies, Steel, Heat Treated, 120/105 Ksi Minimum Tensile StrengthMohammed EldakhakhnyNo ratings yet
- Yellow Illustrative Digital Education For Children InfographicDocument1 pageYellow Illustrative Digital Education For Children InfographicNur Azimah AzibNo ratings yet
- Optare Electric Vehicles: Embracing The EnvironmentDocument4 pagesOptare Electric Vehicles: Embracing The EnvironmentarrenNo ratings yet
- Be RealDocument3 pagesBe RealТатьяна СоколоваNo ratings yet
- Continuous Usage Intention of Social Media As An Online Information Distribution ChannelsDocument12 pagesContinuous Usage Intention of Social Media As An Online Information Distribution Channelsapi-563385491No ratings yet
- Total DataDocument984 pagesTotal DataajayNo ratings yet