Download as docx, pdf, or txt
You might also like
- ASV RC100 Service ManualDocument89 pagesASV RC100 Service Manualpistol pete100% (1)
- VHDL Digital Full ADDER Logic Using NAND Gate ProgramDocument49 pagesVHDL Digital Full ADDER Logic Using NAND Gate ProgramPreeti Budhiraja100% (1)
- Advance in Robot Design and Intelligent Control - 24thDocument464 pagesAdvance in Robot Design and Intelligent Control - 24thLee Chinghang50% (2)
- Master Thesis Topics in RoboticsDocument8 pagesMaster Thesis Topics in Roboticsdpknvhvy100% (2)
- A Comprehensive Study For Robot Navigation Techniques: Cogent EngineeringDocument26 pagesA Comprehensive Study For Robot Navigation Techniques: Cogent EngineeringKishore VennelaNo ratings yet
- SINHDO Seminar 25.9.20Document6 pagesSINHDO Seminar 25.9.20Le Chi HieuNo ratings yet
- Online Courses To Learn Robotics For FREEDocument5 pagesOnline Courses To Learn Robotics For FREEDishant YapaNo ratings yet
- Literature Review Mobile RobotDocument8 pagesLiterature Review Mobile Robotafmzzaadfjygyf100% (1)
- Research Paper On Pick and Place RobotDocument7 pagesResearch Paper On Pick and Place Robotgvzwyd4n100% (1)
- Robotics Projects ThesisDocument8 pagesRobotics Projects Thesismichellebenedictcambridge100% (2)
- Useful Long File Detailed Algo Explanations A Comprehensive Study For Robot NavigationDocument25 pagesUseful Long File Detailed Algo Explanations A Comprehensive Study For Robot NavigationLord VolragonNo ratings yet
- Smart Mobility: Exploring Foundational Technologies and Wider ImpactsFrom EverandSmart Mobility: Exploring Foundational Technologies and Wider ImpactsNo ratings yet
- Literature Review For Industrial RobotsDocument6 pagesLiterature Review For Industrial Robotsea7y3197100% (1)
- Novel Mobile Robot Path Planning Algorithm: Hachour OuardaDocument10 pagesNovel Mobile Robot Path Planning Algorithm: Hachour Ouarday.yusofNo ratings yet
- DGMD S17 Summer2019 Jun20Document6 pagesDGMD S17 Summer2019 Jun20neneNo ratings yet
- Robot DissertationDocument4 pagesRobot DissertationPaySomeoneToWriteYourPaperCanada100% (1)
- Robotics AssignmentDocument3 pagesRobotics AssignmentSameer Pidadi100% (1)
- PGD in Smart Mobility Brochure (Fresh Graduates) - With Link-25 OctDocument13 pagesPGD in Smart Mobility Brochure (Fresh Graduates) - With Link-25 Octmysindhu916No ratings yet
- Open Data Motion Capture: Mocap-Ull Database: SciencedirectDocument11 pagesOpen Data Motion Capture: Mocap-Ull Database: SciencedirectHafidz Bagus PerdanaNo ratings yet
- HOPPY: An Open-Source and Low-Cost Kit For Dynamic Robotics EducationDocument8 pagesHOPPY: An Open-Source and Low-Cost Kit For Dynamic Robotics Educationchoco bananaNo ratings yet
- Research Paper Final YearDocument9 pagesResearch Paper Final YearpdjwjkscbeareknqhsNo ratings yet
- Robot Thesis IdeasDocument7 pagesRobot Thesis Ideasjessicamyerseugene100% (2)
- Mobile Robotics: Research, Applications and Challenges PDFDocument4 pagesMobile Robotics: Research, Applications and Challenges PDFdrugoksNo ratings yet
- NRI-Small: Improved Safety and Reliability of Robotic Systems by Faults/anomalies Detection From Uninterpreted Signals of Computation GraphsDocument19 pagesNRI-Small: Improved Safety and Reliability of Robotic Systems by Faults/anomalies Detection From Uninterpreted Signals of Computation GraphspsupridamuNo ratings yet
- A Proposal of Autonomous Robotic Systems Educative EnvironmentDocument9 pagesA Proposal of Autonomous Robotic Systems Educative Environmentmohammed BiratuNo ratings yet
- Development and Validation of A Robust Speech Interface For Improved Human-Robot InteractionDocument14 pagesDevelopment and Validation of A Robust Speech Interface For Improved Human-Robot InteractionTricia RhindressNo ratings yet
- Mobile Robot Literature ReviewDocument6 pagesMobile Robot Literature Reviewaflslwuup100% (1)
- Grant FP7-2012-IRSES 318902 RABOT Project UK RO CN - Vladareanu - 22july2013Document21 pagesGrant FP7-2012-IRSES 318902 RABOT Project UK RO CN - Vladareanu - 22july2013adrian8086No ratings yet
- Full Chapter Creating Autonomous Vehicle Systems 2Nd Edition Shaoshan Liu PDFDocument53 pagesFull Chapter Creating Autonomous Vehicle Systems 2Nd Edition Shaoshan Liu PDFlawrence.robinson838100% (6)
- Mobility Models For Vehicular Ad Hoc Networks: A Survey and TaxonomyDocument22 pagesMobility Models For Vehicular Ad Hoc Networks: A Survey and TaxonomyNikhil PramodNo ratings yet
- Electronics: Open-Source Drone Programming Course For Distance Engineering EducationDocument18 pagesElectronics: Open-Source Drone Programming Course For Distance Engineering EducationRamakrishna MamidiNo ratings yet
- Development of A Dynamic Intelligent Recognition System For A Real-Time Tracking RobotDocument9 pagesDevelopment of A Dynamic Intelligent Recognition System For A Real-Time Tracking RobotIAES International Journal of Robotics and AutomationNo ratings yet
- IntroductionDocument7 pagesIntroductionAhmad Sambo (El-carlipeey)No ratings yet
- Robotics and Artificial IntelligenceDocument3 pagesRobotics and Artificial Intelligenceraumil123No ratings yet
- Smart Car Parking System Prototype Utilizing CCTVS: April 2015Document2 pagesSmart Car Parking System Prototype Utilizing CCTVS: April 2015Sandeep kumarNo ratings yet
- A Deep Learning Platooning-Based Video Information-Sharing Internet of Things Framework For Autonomous Driving SystemsDocument11 pagesA Deep Learning Platooning-Based Video Information-Sharing Internet of Things Framework For Autonomous Driving SystemslaeeeqNo ratings yet
- Background Subtraction in Real Applications: Challenges, Current Models and Future DirectionsDocument73 pagesBackground Subtraction in Real Applications: Challenges, Current Models and Future Directionscorneli@No ratings yet
- 8 BNG 7 o 8 Zs 0 Jo 1 Bgycyi 5 L 73 BoDocument26 pages8 BNG 7 o 8 Zs 0 Jo 1 Bgycyi 5 L 73 BoPedro RamirezNo ratings yet
- 3 Workshop On User Experience of Autonomous Driving: Alexander Meschtscherjakov Manfred Tscheligi Dalila SzostakDocument3 pages3 Workshop On User Experience of Autonomous Driving: Alexander Meschtscherjakov Manfred Tscheligi Dalila SzostakDionisie LefterNo ratings yet
- Robotics Thesis TitleDocument6 pagesRobotics Thesis TitleNicole Adams100% (2)
- CHAKI, Sudipto Et AlDocument10 pagesCHAKI, Sudipto Et AlguissimoesNo ratings yet
- Research Paper On Traffic LightDocument8 pagesResearch Paper On Traffic Lightegx2asvt100% (1)
- LISS1014 Introduction To Robotics and Autonomous Systems 2017 SyllabusDocument2 pagesLISS1014 Introduction To Robotics and Autonomous Systems 2017 SyllabusweweNo ratings yet
- Driver Safety Alert System: Faculty of Technology and Society Department of Computer ScienceDocument90 pagesDriver Safety Alert System: Faculty of Technology and Society Department of Computer Sciencemulte123No ratings yet
- Airf Ihtisham Letter of MotivationDocument2 pagesAirf Ihtisham Letter of MotivationIHTISHAM ARIFNo ratings yet
- Arif Ihtisham Motivation Letter.Document2 pagesArif Ihtisham Motivation Letter.IHTISHAM ARIFNo ratings yet
- Chapter 1Document6 pagesChapter 1MelanieNo ratings yet
- PHD Topics Available at Nicta, Kensington, NRL: Topics Available in The Making Sense of Data ThemeDocument5 pagesPHD Topics Available at Nicta, Kensington, NRL: Topics Available in The Making Sense of Data ThemeBala MuruganNo ratings yet
- Master Thesis Transportation DesignDocument7 pagesMaster Thesis Transportation DesignGhostWriterForCollegePapersDesMoines100% (2)
- Autonomous Car Literature ReviewDocument4 pagesAutonomous Car Literature Reviewcdkxbcrif100% (1)
- Cognitive Internet of VehiclesDocument13 pagesCognitive Internet of VehicleszthrtzaljccqnuvjdvNo ratings yet
- Evolutionary Deep Learning For Car Park Occupancy Prediction in Smart Cities: 12th International Conference, LION 12, Kalamata, Greece, June 10-15, 2018, Revised Selected PapersDocument16 pagesEvolutionary Deep Learning For Car Park Occupancy Prediction in Smart Cities: 12th International Conference, LION 12, Kalamata, Greece, June 10-15, 2018, Revised Selected PapersMehwish BilalNo ratings yet
- A Robust Autonomous Following Method For Mobile Robots in Dynamic EnvironmentsDocument15 pagesA Robust Autonomous Following Method For Mobile Robots in Dynamic Environmentsabinaya_359109181No ratings yet
- PervasiveDocument3 pagesPervasiveAkshatha VinodNo ratings yet
- Paper AIDocument31 pagesPaper AIklaus peterNo ratings yet
- Exp 5 184Document13 pagesExp 5 184yaminik2408No ratings yet
- Mobile Augmented Reality: User Interfaces, Frameworks, and IntelligenceDocument36 pagesMobile Augmented Reality: User Interfaces, Frameworks, and Intelligenceyemek sepetNo ratings yet
- Fdi TnoDocument1 pageFdi TnoHarsh YadavNo ratings yet
- Literature Review Traffic Light ControllerDocument7 pagesLiterature Review Traffic Light Controllerafmzmqwdglhzex100% (1)
- MILDocument5 pagesMIL喜び エイプリルジョイNo ratings yet
- Robotics Modeling Planning and Control Siciliano BDocument2 pagesRobotics Modeling Planning and Control Siciliano BBhavesh ShiyaniNo ratings yet
- 2020 Book SmartAutomotiveMobility Chapter 5Document358 pages2020 Book SmartAutomotiveMobility Chapter 5hivaNo ratings yet
- Elements of SCRUM in Student Robotics ProjectDocument10 pagesElements of SCRUM in Student Robotics ProjectAbel Varghese DavidNo ratings yet
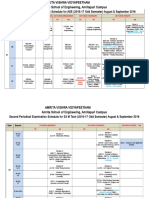
- Time Table - Second PeriodicalDocument2 pagesTime Table - Second PeriodicalAbel Varghese DavidNo ratings yet
- RA 725: Haptic Interfaces: Jose JamesDocument15 pagesRA 725: Haptic Interfaces: Jose JamesAbel Varghese DavidNo ratings yet
- Elementary AlgorithmsDocument622 pagesElementary AlgorithmsAbel Varghese DavidNo ratings yet
- M Tech S3 TTDocument2 pagesM Tech S3 TTAbel Varghese DavidNo ratings yet
- Gitex Floorplan New v3Document1 pageGitex Floorplan New v3Abel Varghese DavidNo ratings yet
- Three-Dimensional Localization and Mapping For Mobile Robot in Disaster EnvironmentsDocument7 pagesThree-Dimensional Localization and Mapping For Mobile Robot in Disaster EnvironmentsAbel Varghese DavidNo ratings yet
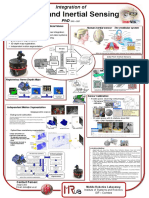
- Jlobo PHD Poster June 2007Document1 pageJlobo PHD Poster June 2007Abel Varghese DavidNo ratings yet
- PR Intro Motor Selection Training FINAL KWDocument2 pagesPR Intro Motor Selection Training FINAL KWAbel Varghese DavidNo ratings yet
- Automated Contaminated Soil Site MonitoringDocument1 pageAutomated Contaminated Soil Site MonitoringAbel Varghese DavidNo ratings yet
- Planner For ProjectsDocument3 pagesPlanner For ProjectsAbel Varghese DavidNo ratings yet
- Proposal For Minor Project: Project Title: Search & Recuse Using HuskyDocument1 pageProposal For Minor Project: Project Title: Search & Recuse Using HuskyAbel Varghese DavidNo ratings yet
- VTK File FormatsDocument19 pagesVTK File FormatshamishlewisNo ratings yet
- RDBMS and Table RelationshipsDocument28 pagesRDBMS and Table RelationshipsForkensteinNo ratings yet
- Machine Learning The BasicsDocument158 pagesMachine Learning The BasicsDomNo ratings yet
- Micro X Ray Fluorescence Spectroscopy First Edition PDFDocument31 pagesMicro X Ray Fluorescence Spectroscopy First Edition PDFAlberto Núñez CardezoNo ratings yet
- Object Oriented Software Engineering 3rd Edition 614 817Document204 pagesObject Oriented Software Engineering 3rd Edition 614 817JUAN ABEL CALLUPE CUEVANo ratings yet
- Orsat ApparatusDocument7 pagesOrsat ApparatusTejas Desai100% (1)
- NotesDocument289 pagesNoteshemanth beharaNo ratings yet
- Data LabDocument6 pagesData LabAnonymous Kmmc9rNo ratings yet
- Structural Design of RCC CWR KL Capacity At-Dist - : 550 Abc NagaurDocument30 pagesStructural Design of RCC CWR KL Capacity At-Dist - : 550 Abc NagaurARSENo ratings yet
- SURveying IIDocument159 pagesSURveying IIpieterNo ratings yet
- 2075 High Power Transmitters System Manual-03Document37 pages2075 High Power Transmitters System Manual-03Dawit LetaNo ratings yet
- Selection, Design, and Installation of Thermoplastic Water-Pressure Piping SystemsDocument8 pagesSelection, Design, and Installation of Thermoplastic Water-Pressure Piping SystemsAcácio AlvesNo ratings yet
- Network+ Guide To Networks 5 Edition: Introduction To TCP/IP ProtocolsDocument88 pagesNetwork+ Guide To Networks 5 Edition: Introduction To TCP/IP ProtocolsRyan OrtegaNo ratings yet
- Fall 2010-11 Course OfferingsDocument3 pagesFall 2010-11 Course OfferingsrezadigitNo ratings yet
- Scentroid SS400-Operation Manual-V2.0Document21 pagesScentroid SS400-Operation Manual-V2.0delboni delboniNo ratings yet
- Neutralization Scrubbers - EN PDFDocument3 pagesNeutralization Scrubbers - EN PDFThe EngineerNo ratings yet
- Karnaugh Map: Engr. Pablo B. Asi Engr. Leni A. Bulan Engr. Liza R. MaderazoDocument18 pagesKarnaugh Map: Engr. Pablo B. Asi Engr. Leni A. Bulan Engr. Liza R. MaderazoDexter DoteNo ratings yet
- BS en 16136-2015Document18 pagesBS en 16136-2015Essam Eldin Metwally AhmedNo ratings yet
- (K. K., Appuu Kuttan) Introduction To Mechatronics (B-Ok - CC)Document346 pages(K. K., Appuu Kuttan) Introduction To Mechatronics (B-Ok - CC)Yogendra MauryaNo ratings yet
- FRWTMCver413eng PDFDocument168 pagesFRWTMCver413eng PDFdrakula85100% (1)
- Design of Machine Element - 1: Zeal Education Society's Zeal College of Engineering and Research PuneDocument20 pagesDesign of Machine Element - 1: Zeal Education Society's Zeal College of Engineering and Research Puneshubham patilNo ratings yet
- Printable Eureka Math 1st Grade Module 3 - End of Module Assessment ReviewDocument20 pagesPrintable Eureka Math 1st Grade Module 3 - End of Module Assessment Reviewapi-397271139No ratings yet
- Data Base Management System: 1. Design and Model of Data in DatabaseDocument2 pagesData Base Management System: 1. Design and Model of Data in DatabaseVunnam HarishNo ratings yet
- Dtu, Department of Energy Engineering S in (KJ/ (KG K) ) - V in (M 3/Kg) - T in (ºc) M.J. Skovrup & H.J.H Knudsen. 19-11-29 Ref:Dupont Suva Hp62Document1 pageDtu, Department of Energy Engineering S in (KJ/ (KG K) ) - V in (M 3/Kg) - T in (ºc) M.J. Skovrup & H.J.H Knudsen. 19-11-29 Ref:Dupont Suva Hp62Diego RamirezNo ratings yet
- Flooded CondensersDocument13 pagesFlooded Condensersstreamt100% (1)
- Mathematical Investigation On The Square of A 3-Digit NumberDocument5 pagesMathematical Investigation On The Square of A 3-Digit NumberMeliza AdvinculaNo ratings yet
- What Is Flow?: Turbulent Flow Laminar FlowDocument3 pagesWhat Is Flow?: Turbulent Flow Laminar FlowAurelia AlexandraNo ratings yet
- Falcon Technology - Joe Zeck, DCI ChinaDocument8 pagesFalcon Technology - Joe Zeck, DCI ChinaZAMIRNo ratings yet