Download as docx, pdf, or txt
You might also like
- CSE316 Operating Systems Practice Subjective Questions For ETEDocument9 pagesCSE316 Operating Systems Practice Subjective Questions For ETEmanikanta.reddy329No ratings yet
- CS341 Software Quality Assurance and Testing - Tutorial2-SolutionDocument3 pagesCS341 Software Quality Assurance and Testing - Tutorial2-SolutionAman PrasadNo ratings yet
- LabVIEW PPT PresentationDocument27 pagesLabVIEW PPT PresentationRanadeep DeyNo ratings yet
- Data Mining Interface, Security, Backup and Recovery, Tuning Data Warehouse, Testing Data Warehouse.Document31 pagesData Mining Interface, Security, Backup and Recovery, Tuning Data Warehouse, Testing Data Warehouse.Anan SirwalNo ratings yet
- Modelling Timing ConstraintsDocument7 pagesModelling Timing ConstraintsPuspala ManojkumarNo ratings yet
- Rajib Mall Lecture NotesDocument91 pagesRajib Mall Lecture NotesAnuj Nagpal75% (4)
- Information Technology Project Management - Third Edition: by Jack T. Marchewka Northern Illinois UniversityDocument38 pagesInformation Technology Project Management - Third Edition: by Jack T. Marchewka Northern Illinois UniversityKashish Jain0% (1)
- What Are The Physical Addresses For The Following Logical AddressesDocument5 pagesWhat Are The Physical Addresses For The Following Logical AddressesObelisk4100% (2)
- 57-The Last-Hour Trading Technique PDFDocument4 pages57-The Last-Hour Trading Technique PDFNavin Chandar100% (1)
- Embedded System: Real-Time Operating SystemsDocument44 pagesEmbedded System: Real-Time Operating SystemsSamuel Adamu100% (1)
- Semester: 8 Sem Subject: DOS Quiz BankDocument92 pagesSemester: 8 Sem Subject: DOS Quiz BankSAI RAMANNo ratings yet
- Software Testing MethodologiesDocument40 pagesSoftware Testing MethodologiesUjwala BhogaNo ratings yet
- Object Oriented Programming (Lab) Assignment # 2: InstructionsDocument2 pagesObject Oriented Programming (Lab) Assignment # 2: Instructionsali yousafNo ratings yet
- Questions and Answers For The Lectures On HCIDocument2 pagesQuestions and Answers For The Lectures On HCImehul agarwalNo ratings yet
- 2 - Text OperationDocument45 pages2 - Text OperationKirubel WakjiraNo ratings yet
- Design & Analysis of Algorithms QuizDocument2 pagesDesign & Analysis of Algorithms QuizDr. Smita AgarwalNo ratings yet
- OOP Course OutlineDocument3 pagesOOP Course Outlinekakahacker360No ratings yet
- 3.modeling Timing ConstraintsDocument43 pages3.modeling Timing ConstraintsPrathamesh Gujar100% (1)
- Top 30 SDLC Interview Questions and AnswersDocument12 pagesTop 30 SDLC Interview Questions and AnswersTutorialsMateNo ratings yet
- Chapter One ISRDocument25 pagesChapter One ISREbisa ChemedaNo ratings yet
- Embedded System-Assignment SolutionDocument2 pagesEmbedded System-Assignment SolutionManjot KaurNo ratings yet
- Multithreading Introduction Creating Threads Process and Threads Thread Life Cycle Thread Priorities Synchronizing ThreadsDocument19 pagesMultithreading Introduction Creating Threads Process and Threads Thread Life Cycle Thread Priorities Synchronizing ThreadsG.l. Saini100% (1)
- CS-1351 Artificial Intelligence - Two MarksDocument24 pagesCS-1351 Artificial Intelligence - Two Marksrajesh199155100% (1)
- Assignment Cloud ComputingDocument13 pagesAssignment Cloud ComputingilovesomeoneNo ratings yet
- Important Questions From Module 3, 4 & 5: A Task Must Be Serviced by Its Deadline PeriodDocument4 pagesImportant Questions From Module 3, 4 & 5: A Task Must Be Serviced by Its Deadline Periodanupnaskar naskarNo ratings yet
- Lecture 2 Fundamental Steps in Digital Image ProcessingDocument4 pagesLecture 2 Fundamental Steps in Digital Image ProcessingAaqib IhrazNo ratings yet
- Final Question BankDocument22 pagesFinal Question BankSURAJ PATELNo ratings yet
- CSD 205 - Design and Analysis of Algorithms: Instructor: Dr. M. Hasan Jamal Lecture# 01: IntroductionDocument101 pagesCSD 205 - Design and Analysis of Algorithms: Instructor: Dr. M. Hasan Jamal Lecture# 01: IntroductionAbdul Sanaullah100% (1)
- Clearance Management System UpdatedDocument25 pagesClearance Management System UpdatedMilkiyas Mosisa100% (1)
- Recommender System SyllabusDocument3 pagesRecommender System SyllabusSri Karthik AvalaNo ratings yet
- Unit-6 Distributed Shared MemoryDocument71 pagesUnit-6 Distributed Shared Memorydeepak2083No ratings yet
- Design and Implementation of Simple Scientific CalculatorDocument7 pagesDesign and Implementation of Simple Scientific CalculatornehaNo ratings yet
- Distributed SystemsDocument15 pagesDistributed SystemsRahul TaldaNo ratings yet
- Unix Lab ManualDocument23 pagesUnix Lab Manualashutoshsk512No ratings yet
- SWE Final ExamDocument15 pagesSWE Final ExamBilal HoorNo ratings yet
- Assignment Questions For M.SC Second Year First Semester Students Course: Distributed Systems: Submission Date: Jan 29Document1 pageAssignment Questions For M.SC Second Year First Semester Students Course: Distributed Systems: Submission Date: Jan 29AlexNo ratings yet
- Artificial Intelligence QuizDocument4 pagesArtificial Intelligence QuizammapetNo ratings yet
- ICS 2305 Systems ProgrammingDocument20 pagesICS 2305 Systems ProgrammingMartin AkulaNo ratings yet
- Ad SW Final Revision Essay QuestionDocument4 pagesAd SW Final Revision Essay QuestionKAREEM Abo ELsouDNo ratings yet
- System Analysis and DesignDocument13 pagesSystem Analysis and Designudara lakshithaNo ratings yet
- Unity University: Blood Bank Management SystemDocument96 pagesUnity University: Blood Bank Management Systembethlehem kebedeNo ratings yet
- Supervised Vs Unsupervised LearningDocument9 pagesSupervised Vs Unsupervised Learningdomomwambi100% (1)
- AI Final Exam For 6kilo.Document4 pagesAI Final Exam For 6kilo.Beki TubeNo ratings yet
- Ambo University Woliso CampusDocument10 pagesAmbo University Woliso CampusTolosa TafeseNo ratings yet
- Monoprogramming Without Swapping & Paging: Memory ManagementDocument21 pagesMonoprogramming Without Swapping & Paging: Memory Managementsrijan consultancyNo ratings yet
- EMBEDDED SYSTEMS (18CS2T40) - Mid Term Exam - 2021-2022Document1 pageEMBEDDED SYSTEMS (18CS2T40) - Mid Term Exam - 2021-2022MONTYNo ratings yet
- ICT Final ExamDocument2 pagesICT Final ExamAbdul Rehman TipuNo ratings yet
- Ai QBDocument28 pagesAi QBNaughty DreamerNo ratings yet
- 600 Computer McqsDocument23 pages600 Computer McqsTariqNo ratings yet
- IR Chap4Document32 pagesIR Chap4biniam teshomeNo ratings yet
- Real-Time Operating SystemDocument36 pagesReal-Time Operating SystemTolera TamiruNo ratings yet
- Operating Systems-1Document24 pagesOperating Systems-1M Jameel MydeenNo ratings yet
- Chimdesa Gedefa Assignment #2 Causal and Entry ConsistencyDocument15 pagesChimdesa Gedefa Assignment #2 Causal and Entry ConsistencyBũ ŚĥNo ratings yet
- Selected Topics in Computer Science CHDocument24 pagesSelected Topics in Computer Science CHMehari TemesgenNo ratings yet
- SAN ProblemsDocument34 pagesSAN ProblemsChidroop FebNo ratings yet
- Embedded System Design Concepts: Characteristics & Quality Attributes of Embedded SystemsDocument27 pagesEmbedded System Design Concepts: Characteristics & Quality Attributes of Embedded SystemsAzeem Top100% (1)
- Ch5 Retrieval Evaluation 2021Document26 pagesCh5 Retrieval Evaluation 2021Abdo AbaborNo ratings yet
- Chapter 1 - Introduction To Software EngineeringDocument33 pagesChapter 1 - Introduction To Software Engineeringdahiyah faridghNo ratings yet
- Operating System Real-Time: Design PhilosophiesDocument5 pagesOperating System Real-Time: Design PhilosophiesAbhishek ShahNo ratings yet
- Chapter 5Document11 pagesChapter 5Rekha PawarNo ratings yet
- Unit-4 - KOE062 Embededded System MaterialsDocument38 pagesUnit-4 - KOE062 Embededded System MaterialsRishabh PrasadNo ratings yet
- Updated CSC List of Odisha - 2015Document40 pagesUpdated CSC List of Odisha - 2015salagram100% (4)
- Find The ProductDocument2 pagesFind The ProductsalagramNo ratings yet
- Find The DifferenceDocument12 pagesFind The DifferencesalagramNo ratings yet
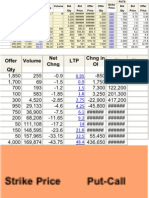
- Option AnalysisDocument3 pagesOption AnalysissalagramNo ratings yet
- Operators: B) Int X 5, y - 2, Z Z X/y + X++Document3 pagesOperators: B) Int X 5, y - 2, Z Z X/y + X++salagramNo ratings yet
- 1 Types of Fuzzy ModelsDocument5 pages1 Types of Fuzzy ModelssalagramNo ratings yet
- VSAM To DB2 ConversionDocument63 pagesVSAM To DB2 ConversionKumar AbhishekNo ratings yet
- SAT 0400 Computing and Digital Technology NetworkingDocument8 pagesSAT 0400 Computing and Digital Technology NetworkingFar FarNo ratings yet
- YBD868 Digital IC Tester: Operation ManualDocument12 pagesYBD868 Digital IC Tester: Operation ManualFabiano TonnNo ratings yet
- CNC Lathe Operating ManualDocument5 pagesCNC Lathe Operating Manualkhayam khanNo ratings yet
- Publicly PAS 0001-3-4 Available Specification Date: 10 November 1999Document25 pagesPublicly PAS 0001-3-4 Available Specification Date: 10 November 1999ROUSSEAU MathieuNo ratings yet
- Lectut CSN 102 PDF DS - Part1Document76 pagesLectut CSN 102 PDF DS - Part1Rahul YadavNo ratings yet
- Internet and EmailsDocument67 pagesInternet and EmailsWANKYO JOSHUANo ratings yet
- Battery Specification: Document Number & RevisionDocument23 pagesBattery Specification: Document Number & RevisionEricNo ratings yet
- Advanced Binary Deobfuscation PDFDocument136 pagesAdvanced Binary Deobfuscation PDFkougaR8No ratings yet
- PSCAD V5 - HPC Brochure 2023Document2 pagesPSCAD V5 - HPC Brochure 2023vaucejoNo ratings yet
- TwinCAT NC Error Codes - ENDocument53 pagesTwinCAT NC Error Codes - ENлгпмNo ratings yet
- Westermo MG 6101-3201 WeosDocument1,215 pagesWestermo MG 6101-3201 WeosserkalemtayeNo ratings yet
- DAA Assignment 01 SolutionDocument4 pagesDAA Assignment 01 SolutionPro HammadNo ratings yet
- The SAP HANA StudioDocument14 pagesThe SAP HANA Studioramesh bandari bandariNo ratings yet
- Ga F2a55m S1Document31 pagesGa F2a55m S1Kleber CostaNo ratings yet
- A Study On New Arduino NANO Board For WSN and IoT ApplicationsDocument9 pagesA Study On New Arduino NANO Board For WSN and IoT ApplicationsCody BestNo ratings yet
- Topic 3Document11 pagesTopic 3FrancineNo ratings yet
- ktqm87 Mitx Users Guide Rev GDocument113 pagesktqm87 Mitx Users Guide Rev GIstván Pacikacaj MagyarNo ratings yet
- Cloud Computing BOOKDocument83 pagesCloud Computing BOOKNaazir jemaNo ratings yet
- h17840 Poweredge Sap Hana VGDocument43 pagesh17840 Poweredge Sap Hana VGdanycuppariNo ratings yet
- Li 等 - 2023 - Comparison and Evaluation on Static Application SeDocument13 pagesLi 等 - 2023 - Comparison and Evaluation on Static Application SesnakinyaNo ratings yet
- Ajp Question MCQDocument16 pagesAjp Question MCQRutuja PoteNo ratings yet
- Reading Enhancement Module On Computer System ServicingDocument2 pagesReading Enhancement Module On Computer System ServicingVincent LibreaNo ratings yet
- Naga Sirisha: Phone: 510-813-5710Document4 pagesNaga Sirisha: Phone: 510-813-5710Md javeedNo ratings yet
- Resume of MD: Farhad Rana IT Support Engineer: ObjectiveDocument2 pagesResume of MD: Farhad Rana IT Support Engineer: ObjectiveF K R AnaNo ratings yet
- StacktraceDocument96 pagesStacktraceZeryab AhmedNo ratings yet
- JBL Tune 720bt QSGDocument2 pagesJBL Tune 720bt QSGKike SifuentesNo ratings yet
- Prognostics of Power MOSFET Using Artificial Neural Network ApproachDocument13 pagesPrognostics of Power MOSFET Using Artificial Neural Network ApproachMohan Kumar DashNo ratings yet
- Computer Programming: Instructor: Junaid Rashid Lab 1: Introduction To Computer ProgrammingDocument31 pagesComputer Programming: Instructor: Junaid Rashid Lab 1: Introduction To Computer Programmingahmad hassanNo ratings yet
- HashingDocument3 pagesHashingMarti Rishi kumarNo ratings yet