Download as docx, pdf, or txt
You might also like
- Ejes Grs890, Grs900, Grs920 y OtrasDocument36 pagesEjes Grs890, Grs900, Grs920 y OtrasLucas Laporte75% (4)
- ICTL Test2Document2 pagesICTL Test2Fweeda Mk100% (1)
- Gears: Gear Types 1.2 Gear Nomenclature and FormulasDocument17 pagesGears: Gear Types 1.2 Gear Nomenclature and FormulasDarwin LimNo ratings yet
- Spur Gear Fatigue LifeDocument7 pagesSpur Gear Fatigue LifeGamini SureshNo ratings yet
- 5.0 GearsDocument9 pages5.0 GearsMaggy IrunguNo ratings yet
- Chap-6 Gears 1Document30 pagesChap-6 Gears 1AlysNo ratings yet
- Rajesh Final Book@28!11!16Document168 pagesRajesh Final Book@28!11!16rajeshNo ratings yet
- Machine Design & Drawing - II - GEARSDocument12 pagesMachine Design & Drawing - II - GEARSSenthil KumarNo ratings yet
- GearDocument21 pagesGeardaniel hambissaNo ratings yet
- Gear MeasurementDocument12 pagesGear MeasurementCobra BabaNo ratings yet
- Load Sharing Based Fillet Stress Analysis of Involute Helical GearsDocument5 pagesLoad Sharing Based Fillet Stress Analysis of Involute Helical GearsR Prabhu SekarNo ratings yet
- Design Consideration of Transmisson SystemDocument39 pagesDesign Consideration of Transmisson SystemKaung KhantNo ratings yet
- BevelDocument20 pagesBevelOmer NadeemNo ratings yet
- University of Hail: Gears - GeneralDocument51 pagesUniversity of Hail: Gears - GeneralROBINNo ratings yet
- Chapter 3Document14 pagesChapter 3Kaung KhantNo ratings yet
- Ch1 Gear TrainsDocument79 pagesCh1 Gear Trainsخالد المالكيNo ratings yet
- Gear Trains: Qassim University Unayzah College of Engineering Mechanical Engineering DeptDocument42 pagesGear Trains: Qassim University Unayzah College of Engineering Mechanical Engineering DeptDanialNo ratings yet
- Dynamic Simulation of Meshing Force in Broken Tooth Involute Gear Meshing Process Based On ADAMSDocument4 pagesDynamic Simulation of Meshing Force in Broken Tooth Involute Gear Meshing Process Based On ADAMSAsha VenkataramNo ratings yet
- Research Article Design and Investigation of An Asymmetric Logarithmic Spiral Gear DriveDocument15 pagesResearch Article Design and Investigation of An Asymmetric Logarithmic Spiral Gear DriveAHMED WALIDNo ratings yet
- Chapter 9 Spur Gear DesignDocument27 pagesChapter 9 Spur Gear Designagung badoNo ratings yet
- Introduction To Mechanisms: 7 GearsDocument15 pagesIntroduction To Mechanisms: 7 GearsgauravthamanNo ratings yet
- DVGDocument53 pagesDVGbalajigandhirajanNo ratings yet
- Hypoid Gears With Involute Teeth: David B. DoonerDocument6 pagesHypoid Gears With Involute Teeth: David B. DoonerLibardo Cardenas PNo ratings yet
- Helical Gears: (Buckingham) Book)Document18 pagesHelical Gears: (Buckingham) Book)govindarajan017100% (1)
- Universidad Autónoma de Querétaro.: Facultad de Ingeniería. Ingeniería ElectromecánicaDocument16 pagesUniversidad Autónoma de Querétaro.: Facultad de Ingeniería. Ingeniería ElectromecánicaSalvador Vega MancillaNo ratings yet
- Bevel GearDocument28 pagesBevel Gearmahesh kitturNo ratings yet
- TEMERADocument6 pagesTEMERATahir FadhilNo ratings yet
- ZEIT3700 Notes Gearing 1Document6 pagesZEIT3700 Notes Gearing 1ghufran015580No ratings yet
- Gear TerminologyDocument42 pagesGear Terminologyyair Enrique Romero OspinoNo ratings yet
- 7 Gears: 7.1 Gear ClassificationDocument10 pages7 Gears: 7.1 Gear ClassificationAshish SinglaNo ratings yet
- ME324 Lecture5Document66 pagesME324 Lecture5Jam Maica TuboNo ratings yet
- Conjugate Tooth-1-2 PDFDocument8 pagesConjugate Tooth-1-2 PDFHarshavardhan Kutal100% (1)
- UntitledDocument16 pagesUntitledDavid DjNo ratings yet
- Gear Backlash: 6.1 Types of BacklashesDocument13 pagesGear Backlash: 6.1 Types of BacklashesRamazan MERALNo ratings yet
- Gear Classification: Page - 1Document12 pagesGear Classification: Page - 1maloyNo ratings yet
- Gang ADocument46 pagesGang Aganga6013No ratings yet
- GearsDocument46 pagesGearsNarender NarruNo ratings yet
- Gears: Looking For GATE Preparation Material? Join & Get Here Now!Document8 pagesGears: Looking For GATE Preparation Material? Join & Get Here Now!Akash SoniNo ratings yet
- Introduction To Mechanisms: 7 GearsDocument15 pagesIntroduction To Mechanisms: 7 GearsDezert EagleNo ratings yet
- Gear ModuleDocument4 pagesGear ModuleAakash KarkiNo ratings yet
- Design of Differential For Automobile Teaching Aid: © AUG 2019 - IRE Journals - Volume 3 Issue 2 - ISSN: 2456-8880Document6 pagesDesign of Differential For Automobile Teaching Aid: © AUG 2019 - IRE Journals - Volume 3 Issue 2 - ISSN: 2456-8880Obaida BawezNo ratings yet
- 2 Marks: Q & A Spur Gear Terminology and DefinitionsDocument71 pages2 Marks: Q & A Spur Gear Terminology and DefinitionsPrasanna Sekar0% (1)
- Unit 11Document36 pagesUnit 11Sandeep PrajapatiNo ratings yet
- 7 Gears: 7.1 Gear ClassificationDocument15 pages7 Gears: 7.1 Gear ClassificationSimrit Kaur MakanNo ratings yet
- GEARSDocument46 pagesGEARSsrsoumyankNo ratings yet
- Gears Nomenclature: by Feedback by Comments 1 MahekDocument20 pagesGears Nomenclature: by Feedback by Comments 1 MahekSujai BaskarNo ratings yet
- Gears Nomenclature: by Feedback by Comments 1 MahekDocument20 pagesGears Nomenclature: by Feedback by Comments 1 MahekSujai BaskarNo ratings yet
- IN 2020 AkashDocument12 pagesIN 2020 AkashSriram SundarNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document7 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- Kom May-June 2013Document8 pagesKom May-June 2013nazeerabiaNo ratings yet
- Theory of Machine: Toothed GearingDocument14 pagesTheory of Machine: Toothed GearingRs SumitNo ratings yet
- Chapter 9 Spur Gear DesignDocument122 pagesChapter 9 Spur Gear DesignJimmy Silvera OtañeNo ratings yet
- Design of Helical and Bevel GearDocument53 pagesDesign of Helical and Bevel GearPRANAY SHRIDHAR100% (1)
- Helical GearsDocument24 pagesHelical GearsPrakash Joshi88% (8)
- ME 308 Machine Elements Ii: 26.04.2012 Chapter 5 Spur Gears 1Document31 pagesME 308 Machine Elements Ii: 26.04.2012 Chapter 5 Spur Gears 1Nihat YildirimNo ratings yet
- MMTPaper TDocument18 pagesMMTPaper TArnaud LegrosNo ratings yet
- Toothed Gearing: (Chapter-12 R.S. KHURMI)Document35 pagesToothed Gearing: (Chapter-12 R.S. KHURMI)Somnath Somadder100% (1)
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisFrom EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNo ratings yet
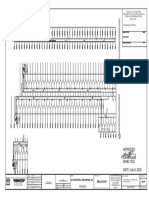
- m2-02 Stair Fireman's Lift Pressurization-1351m2-03-1Document1 pagem2-02 Stair Fireman's Lift Pressurization-1351m2-03-1Darwin LimNo ratings yet
- Container Quantities: All Standard Bolts Except Lag ScrewsDocument1 pageContainer Quantities: All Standard Bolts Except Lag ScrewsDarwin LimNo ratings yet
- Office of The Building Official: Cebu CityDocument1 pageOffice of The Building Official: Cebu CityDarwin LimNo ratings yet
- Behold The Technique1Document30 pagesBehold The Technique1Darwin LimNo ratings yet
- M0 Drawing Index, Abbreviation, Legend and SymbolsDocument1 pageM0 Drawing Index, Abbreviation, Legend and SymbolsDarwin LimNo ratings yet
- Painting New Gypsum BoardDocument2 pagesPainting New Gypsum BoardNuri MadinaNo ratings yet
- Multiple Box MotionsDocument10 pagesMultiple Box MotionsSambit Mohapatra33% (3)
- Fault Finding Chart For Motorcycle Electrical SystemsDocument4 pagesFault Finding Chart For Motorcycle Electrical SystemsntulaNo ratings yet
- F400E Bubble-03445C-06 EN HR MK SL SQ SR PDFDocument288 pagesF400E Bubble-03445C-06 EN HR MK SL SQ SR PDFtmpopescuNo ratings yet
- Applied Chemistry UNIT 3Document8 pagesApplied Chemistry UNIT 3Mikdhad MikkuNo ratings yet
- FL PDFDocument190 pagesFL PDFDan Birkenhead100% (1)
- MZ TuningDocument24 pagesMZ TuningJawaCz100% (2)
- IM ADR245B Feeder Protection20!4!2016Document336 pagesIM ADR245B Feeder Protection20!4!2016sgshekar30No ratings yet
- Manual: (Translation)Document13 pagesManual: (Translation)kapasariNo ratings yet
- 03 Engine Parts CatalogDocument28 pages03 Engine Parts Catalogmotomech100% (2)
- Air Leak TestingDocument5 pagesAir Leak TestingsarikaNo ratings yet
- 318eia Hca318 001Document2 pages318eia Hca318 001Ari SaputraNo ratings yet
- Skoda Accessories Brochure Web July 2015Document13 pagesSkoda Accessories Brochure Web July 2015Anonymous GKqp4HnNo ratings yet
- I-Matrix 500 Io BridgeDocument160 pagesI-Matrix 500 Io BridgeBazzie50% (2)
- Lesson Plan AMC and AWPDocument3 pagesLesson Plan AMC and AWPupenderNo ratings yet
- Metal Joining (Fasteners)Document11 pagesMetal Joining (Fasteners)ganeshNo ratings yet
- Solid Solution StrengtheningDocument9 pagesSolid Solution StrengtheningImam Hadillah MuhfiNo ratings yet
- Me Manufacturing CurriculumDocument37 pagesMe Manufacturing CurriculumJeyaram kumarNo ratings yet
- Integrity Assessment of Bucket Wheel Excavator Welded Structures by Using The Single Selection MethodDocument6 pagesIntegrity Assessment of Bucket Wheel Excavator Welded Structures by Using The Single Selection MethodJohn RobinsonNo ratings yet
- 11508639Document636 pages11508639krisorn100% (1)
- 3126bplanta PDFDocument2 pages3126bplanta PDFjacintoNo ratings yet
- Steel Beam Analysis & Design (Bs5950) in Accordance With BS5950-1:2000 Incorporating Corrigendum No.1Document4 pagesSteel Beam Analysis & Design (Bs5950) in Accordance With BS5950-1:2000 Incorporating Corrigendum No.1MenchebelleNo ratings yet
- Automated Car Jack PDFDocument3 pagesAutomated Car Jack PDFakashlogic100% (1)
- BETO-Concepts Wall Systems - PresentationDocument23 pagesBETO-Concepts Wall Systems - PresentationnurNo ratings yet
- Imp-Comparison of SpecificationsDocument7 pagesImp-Comparison of SpecificationsKetan PatelNo ratings yet
- Product & ServicesDocument12 pagesProduct & Servicesreign226No ratings yet
- 171 The Seismic Design of Industrial Plants: 4, DECEMBER 1982Document14 pages171 The Seismic Design of Industrial Plants: 4, DECEMBER 1982Suneesh PNo ratings yet