Download as pdf or txt
You might also like
- Depth Prediction Single ImageDocument8 pagesDepth Prediction Single ImageDiksha MeghwalNo ratings yet
- IEEE Guide For Thermal Resistivity Measurements of Soils and Backfill MaterialsDocument33 pagesIEEE Guide For Thermal Resistivity Measurements of Soils and Backfill MaterialsMarcos Serrão93% (27)
- Disconnector Contact Condition PDFDocument130 pagesDisconnector Contact Condition PDFipraoNo ratings yet
- Design. Construction of A Charcoal Backing OvenDocument6 pagesDesign. Construction of A Charcoal Backing OvenraduonoNo ratings yet
- Circular Motion LabDocument4 pagesCircular Motion LabJasdeepSinghNo ratings yet
- The Templist Scroll by :dr. Lawiy-Zodok (C) (R) TMDocument144 pagesThe Templist Scroll by :dr. Lawiy-Zodok (C) (R) TM:Lawiy-Zodok:Shamu:-El100% (5)
- Cvpr2012 Example BasedDocument8 pagesCvpr2012 Example BasednidartsNo ratings yet
- 2.1. Representation of Curves: Geometric ModelingDocument88 pages2.1. Representation of Curves: Geometric ModelingSrinith KumarNo ratings yet
- 2.1. Representation of Curves: Geometric ModelingDocument88 pages2.1. Representation of Curves: Geometric ModelingSrinith KumarNo ratings yet
- A Few Good Lines: Suggestive Drawing of 3D ModelsDocument11 pagesA Few Good Lines: Suggestive Drawing of 3D ModelsSeanOrlandaNo ratings yet
- Resolution Independent Curve Rendering Using Programmable Graphics HardwareDocument10 pagesResolution Independent Curve Rendering Using Programmable Graphics HardwarearanhilNo ratings yet
- Module 1Document45 pagesModule 1SohanNo ratings yet
- Geometric Modeling: Geometrical Entities E.G. Circular, Rectangular, Straight. Elliptical Etc. Refers To GeometricalDocument9 pagesGeometric Modeling: Geometrical Entities E.G. Circular, Rectangular, Straight. Elliptical Etc. Refers To Geometricalstephen mwendwaNo ratings yet
- A Volumetric Method For Building Complex Models From Range ImagesDocument10 pagesA Volumetric Method For Building Complex Models From Range ImagesHarre Bams Ayma ArandaNo ratings yet
- Unit 2 (Detail)Document123 pagesUnit 2 (Detail)vishwajeet patilNo ratings yet
- SketchingReality TOG PDFDocument21 pagesSketchingReality TOG PDFSunny RajNo ratings yet
- Sketching Piecewise Clothoid CurvesDocument8 pagesSketching Piecewise Clothoid Curvesidrissi_toronNo ratings yet
- Technical Talk On CAD: Kurian Antony M.E Cad/CamDocument28 pagesTechnical Talk On CAD: Kurian Antony M.E Cad/Camjust4kurianNo ratings yet
- Interactive Pen-And-Ink Rendering For Im PDFDocument1 pageInteractive Pen-And-Ink Rendering For Im PDFSwapnil JaiswalNo ratings yet
- Jia Leveraging Line-Point Consistence To Preserve Structures For Wide Parallax Image CVPR 2021 PaperDocument10 pagesJia Leveraging Line-Point Consistence To Preserve Structures For Wide Parallax Image CVPR 2021 PaperklammNo ratings yet
- Presentations of Geometry For Computer GraphicsDocument155 pagesPresentations of Geometry For Computer GraphicsulyanovsergeyNo ratings yet
- CG - Assignment 2Document6 pagesCG - Assignment 2parth solankiNo ratings yet
- A Region-Based Model and Binary Level Set Function Applied To Weld Defects Detection in Radiographic ImagesDocument9 pagesA Region-Based Model and Binary Level Set Function Applied To Weld Defects Detection in Radiographic ImagesInternational Journal of New Computer Architectures and their Applications (IJNCAA)No ratings yet
- Geometric Approaches: 1. What Is A Finite Precision Line?Document10 pagesGeometric Approaches: 1. What Is A Finite Precision Line?naru_saNo ratings yet
- Visibility Graph AlgorithmDocument30 pagesVisibility Graph AlgorithmAldo MuliaNo ratings yet
- CAD CAM Viva QuestionsDocument3 pagesCAD CAM Viva QuestionsTheja Sree100% (3)
- Towards Recovery of Complex Shapes in Meshes Using Digital Images For Reverse Engineering ApplicationsDocument17 pagesTowards Recovery of Complex Shapes in Meshes Using Digital Images For Reverse Engineering Applicationsnamaku7No ratings yet
- Animated Mesh Approximation With Sphere-MeshesDocument13 pagesAnimated Mesh Approximation With Sphere-MeshesfreferfNo ratings yet
- Stringart2018 Preprint LowDocument12 pagesStringart2018 Preprint LowlolfreealistarNo ratings yet
- Picture CollageDocument8 pagesPicture CollageLuisa Fernanda HernándezNo ratings yet
- CG - Assignment 2Document5 pagesCG - Assignment 2parth solankiNo ratings yet
- HarmonicSkeleton PDFDocument10 pagesHarmonicSkeleton PDFNicola LandroNo ratings yet
- Reciprocal Diagrams, Graphic Statics, Airy Stress Functions and PolyhedraDocument14 pagesReciprocal Diagrams, Graphic Statics, Airy Stress Functions and PolyhedraS GNo ratings yet
- Primal Sketch: Integrating Structure and Texture ?: Cheng-En Guo, Song-Chun Zhu, and Ying Nian WuDocument26 pagesPrimal Sketch: Integrating Structure and Texture ?: Cheng-En Guo, Song-Chun Zhu, and Ying Nian WuGautam JhaNo ratings yet
- Omi 2018Document34 pagesOmi 2018Nurul ChabizahNo ratings yet
- Curve, Surface and SolidDocument62 pagesCurve, Surface and SolidwadlanNo ratings yet
- A Papier-M Ach e Approach To Learning 3D Surface GenerationDocument9 pagesA Papier-M Ach e Approach To Learning 3D Surface Generationpepepe123jkghjkhNo ratings yet
- Angular Domain Reconstruction of Dynamic 3D Fluid SurfacesDocument8 pagesAngular Domain Reconstruction of Dynamic 3D Fluid Surfaces会爆炸的小米NoteNo ratings yet
- Deepfacedrawing: Deep Generation of Face Images From SketchesDocument16 pagesDeepfacedrawing: Deep Generation of Face Images From SketchesRodutchi RodNo ratings yet
- CAD CAM Viva QuestionsDocument3 pagesCAD CAM Viva QuestionsAshok BhatiaNo ratings yet
- Rapid Serial Visual Presentation in Dynamic Graph VisualizationDocument8 pagesRapid Serial Visual Presentation in Dynamic Graph VisualizationLala Sandoval de LunaNo ratings yet
- Interpreting Line Drawings of Curved ObjectsDocument31 pagesInterpreting Line Drawings of Curved Objectskede0309No ratings yet
- Graphics Note 5-6Document27 pagesGraphics Note 5-6Technical DipeshNo ratings yet
- Local Greyvalue Invariants For Image Retrieval: Vector of Local CharacteristicsDocument6 pagesLocal Greyvalue Invariants For Image Retrieval: Vector of Local CharacteristicsjimakosjpNo ratings yet
- Berg Cvpr05Document8 pagesBerg Cvpr05Babu MadanNo ratings yet
- Rethinking Inductive Biases For Surface Normal EstimationDocument14 pagesRethinking Inductive Biases For Surface Normal EstimationClark RenNo ratings yet
- Icra09 TaskSpaceTrajectoriesCubicSplineOptimizationDocument8 pagesIcra09 TaskSpaceTrajectoriesCubicSplineOptimizationsigmateNo ratings yet
- Progressive Meshes: Hugues HoppeDocument10 pagesProgressive Meshes: Hugues HoppeJorge AlmiNo ratings yet
- SIGDT 2D Curve ReconstructionDocument12 pagesSIGDT 2D Curve Reconstructionaria3taryNo ratings yet
- TVCG 2010 02 0054.R2Document15 pagesTVCG 2010 02 0054.R2Abdul WaresNo ratings yet
- AIM2000-a Program To Analyze and VisualizeDocument15 pagesAIM2000-a Program To Analyze and VisualizeNorberto MonteiroNo ratings yet
- Flow Based Image Abstraction ZhYDocument15 pagesFlow Based Image Abstraction ZhYAmith ReddyNo ratings yet
- Pose Space Deformation: A Unified Approach To Shape Interpolation and Skeleton-Driven DeformationDocument8 pagesPose Space Deformation: A Unified Approach To Shape Interpolation and Skeleton-Driven DeformationTeófilo Andrade FarfánNo ratings yet
- Screened Poisson Surface ReconstructionDocument13 pagesScreened Poisson Surface ReconstructionBrianChenNo ratings yet
- cvpr06 3dreconstructionindoorDocument8 pagescvpr06 3dreconstructionindoordixade1732No ratings yet
- Using AutoCAD For Descriptive Geometry Exercises - in Undergraduate Structural GeologyDocument7 pagesUsing AutoCAD For Descriptive Geometry Exercises - in Undergraduate Structural Geologyarief_70% (1)
- Manifold-Based B-Splines On Unstructured Meshes: Zq217@cam - Ac.uk Fc286@cam - Ac.ukDocument19 pagesManifold-Based B-Splines On Unstructured Meshes: Zq217@cam - Ac.uk Fc286@cam - Ac.ukzafer maNo ratings yet
- Rendering Parametric Surfaces in Pen and Ink: Georges Winkenbach David H. SalesinDocument8 pagesRendering Parametric Surfaces in Pen and Ink: Georges Winkenbach David H. SalesinAnonymous GKqp4HnNo ratings yet
- Another Simple But Faster Method For 2D Line ClippingDocument15 pagesAnother Simple But Faster Method For 2D Line ClippingijcgaNo ratings yet
- p52 GoldmanDocument35 pagesp52 GoldmanJerónimo CardanoNo ratings yet
- Exploring The Radon and Trace TransformsDocument8 pagesExploring The Radon and Trace TransformsIgor GartziaNo ratings yet
- ManhattanDocument8 pagesManhattangagauNo ratings yet
- Multi View Three Dimensional Reconstruction: Advanced Techniques for Spatial Perception in Computer VisionFrom EverandMulti View Three Dimensional Reconstruction: Advanced Techniques for Spatial Perception in Computer VisionNo ratings yet
- Procedural Surface: Exploring Texture Generation and Analysis in Computer VisionFrom EverandProcedural Surface: Exploring Texture Generation and Analysis in Computer VisionNo ratings yet
- Image Based Modeling and Rendering: Exploring Visual Realism: Techniques in Computer VisionFrom EverandImage Based Modeling and Rendering: Exploring Visual Realism: Techniques in Computer VisionNo ratings yet
- TENSACCIAI - Rock and Soil AnchorsDocument0 pagesTENSACCIAI - Rock and Soil Anchorsnovakno1No ratings yet
- Aits 1718 PT III Jee Main PCMDocument20 pagesAits 1718 PT III Jee Main PCMUC SrivastavaNo ratings yet
- Schrödinger's Cat Is A Thought ExperimentDocument10 pagesSchrödinger's Cat Is A Thought ExperimentirayoNo ratings yet
- Senior High School Electronic Class Record: InstructionsDocument38 pagesSenior High School Electronic Class Record: InstructionsjingNo ratings yet
- Comparative Analysis Between PI & Backstepping Control Strategies of DFIG Driven by Wind TurbineDocument10 pagesComparative Analysis Between PI & Backstepping Control Strategies of DFIG Driven by Wind Turbinehamza gaNo ratings yet
- Petrotech 2019: Guidelines & Instructions To Authors For Full Manuscript GuidelinesDocument4 pagesPetrotech 2019: Guidelines & Instructions To Authors For Full Manuscript GuidelinesfelujiluNo ratings yet
- Principal Component AnalysisDocument33 pagesPrincipal Component Analysisjohn949No ratings yet
- Analysis of StructureDocument32 pagesAnalysis of StructureSuppahot FireNo ratings yet
- TRUSSES Detailed DRGDocument3 pagesTRUSSES Detailed DRGprabhu81No ratings yet
- Method of Painting WorksDocument43 pagesMethod of Painting WorksIkram Syed50% (2)
- Using Time WaveformDocument5 pagesUsing Time WaveformfranksuaiNo ratings yet
- Kinematic Coupling 3groove DesignDocument6 pagesKinematic Coupling 3groove Designthulasi_krishnaNo ratings yet
- IndelecDocument6 pagesIndelecvasilevigor100% (1)
- Tripa de GallinaDocument68 pagesTripa de GallinaJake GallardoNo ratings yet
- Mathematical Miracle in Lexical ConcordanceDocument6 pagesMathematical Miracle in Lexical Concordanceapi-3700570No ratings yet
- Laboratory Investigation of Coarse AggregateDocument11 pagesLaboratory Investigation of Coarse AggregateComr A Y ZarginaNo ratings yet
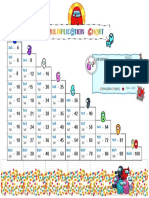
- Multiplication ChartDocument1 pageMultiplication ChartManeerat CharoennapapornNo ratings yet
- Soft Bearing Suspension: DatasheetDocument5 pagesSoft Bearing Suspension: DatasheetRuben Marcos HuatucoNo ratings yet
- ComparativePM 06 07Document144 pagesComparativePM 06 07DeBrialmontNo ratings yet
- BEAMCOL13Document9 pagesBEAMCOL13NEONo ratings yet
- NC - Noise CriterionDocument3 pagesNC - Noise CriterionGanaka KodithuwakkuNo ratings yet
- Tekla Structural Designer 2023 Premium CourseDocument6 pagesTekla Structural Designer 2023 Premium Coursekheang mengNo ratings yet
- Chapter 4 Engine SimulationDocument18 pagesChapter 4 Engine SimulationNguyen Trong NhanNo ratings yet
- 1 Input Data: Profis Anchor 2.7.1Document6 pages1 Input Data: Profis Anchor 2.7.1Shafeeq KTNo ratings yet
- Assab 718 HHDocument8 pagesAssab 718 HHMoutaz IsmailNo ratings yet