Download as pdf or txt
You might also like
- 6-w912gb17d0001 Rev 100pct Amend 0006 Ctab-BDocument150 pages6-w912gb17d0001 Rev 100pct Amend 0006 Ctab-BCatalin BailescuNo ratings yet
- Application of Elman Neural Network and MATLAB To Load ForecastingDocument5 pagesApplication of Elman Neural Network and MATLAB To Load ForecastingPradeep SinglaNo ratings yet
- Wavelet Networks For Nonlinear System ModelingDocument9 pagesWavelet Networks For Nonlinear System ModelingMarcos GarcíaNo ratings yet
- Training Neural Networks With GA Hybrid AlgorithmsDocument12 pagesTraining Neural Networks With GA Hybrid Algorithmsjkl316No ratings yet
- Distance Transmission Line Protection Based On Radial Basis Function Neural NetworkDocument4 pagesDistance Transmission Line Protection Based On Radial Basis Function Neural Networknauman_sadiq_1No ratings yet
- KursorDocument11 pagesKursorPaulina MelialaNo ratings yet
- Enhanced SLAM For Autonomous Mobile Robots Using Unscented Kalman Filter and Neural NetworkDocument6 pagesEnhanced SLAM For Autonomous Mobile Robots Using Unscented Kalman Filter and Neural NetworkAqilAbbasiNo ratings yet
- Vai 1999Document11 pagesVai 1999dsa sdsddsddsNo ratings yet
- Back Propagation Algorithm - A Review: Mrinalini Smita & Dr. Anita KumariDocument6 pagesBack Propagation Algorithm - A Review: Mrinalini Smita & Dr. Anita KumariTJPRC PublicationsNo ratings yet
- 5 MSDocument5 pages5 MSmuhammad2003salmanNo ratings yet
- Hardware Implementation of A MLP Network With On-Chip LearningDocument6 pagesHardware Implementation of A MLP Network With On-Chip LearningYuukiaNo ratings yet
- Design and Application of Wavelet Networks Based On Immune Algorithm - Machine Learning and Cybernetics, 2004. Proceedings of 2004 ConferenceDocument5 pagesDesign and Application of Wavelet Networks Based On Immune Algorithm - Machine Learning and Cybernetics, 2004. Proceedings of 2004 ConferencePhuc Pham XuanNo ratings yet
- ECSE484 Intro v2Document67 pagesECSE484 Intro v2Zaid SulaimanNo ratings yet
- Fingerprint Identification by Using Artificial Neural Network With Optical Wavelet PreprocessingDocument12 pagesFingerprint Identification by Using Artificial Neural Network With Optical Wavelet Preprocessinghoangcongtu2251988No ratings yet
- Neural Networks in Automated Measurement Systems: State of The Art and New Research TrendsDocument6 pagesNeural Networks in Automated Measurement Systems: State of The Art and New Research TrendsEmin KültürelNo ratings yet
- Application of Ann To Low Frequency Oscillations Detection in Iraqi National Power SystemDocument4 pagesApplication of Ann To Low Frequency Oscillations Detection in Iraqi National Power SystemkodandaramNo ratings yet
- The Unscented Kalman Filter For Nonlinear EstimationDocument6 pagesThe Unscented Kalman Filter For Nonlinear Estimationrouf johnNo ratings yet
- Aspects of The Numerical Analysis of Neural NetworksDocument58 pagesAspects of The Numerical Analysis of Neural Networks은지No ratings yet
- Time-Series Prediction Using A Local Linear Wavelet Neural NetworkDocument17 pagesTime-Series Prediction Using A Local Linear Wavelet Neural NetworksadaimiNo ratings yet
- NNs PDFDocument16 pagesNNs PDFAkshay PatilNo ratings yet
- Back PropagationDocument27 pagesBack PropagationShahbaz Ali Khan100% (1)
- Tabu Based Back Propagation Algorithm For Performance Improvement in Communication ChannelsDocument5 pagesTabu Based Back Propagation Algorithm For Performance Improvement in Communication Channelsjkl316No ratings yet
- Machine Learning: Algorithms and Applications: Philip O. OgunbonaDocument29 pagesMachine Learning: Algorithms and Applications: Philip O. OgunbonaNguyễn Hoàng Phương TrầnNo ratings yet
- FlannDocument8 pagesFlannNadeem UddinNo ratings yet
- Anfis NoteDocument15 pagesAnfis NoteNimoNo ratings yet
- Generalizing Mlps With Dropouts, Batch Normalization, and Skip ConnectionsDocument10 pagesGeneralizing Mlps With Dropouts, Batch Normalization, and Skip ConnectionsAnil Kumar BNo ratings yet
- Application of Artificial Neural NetworkDocument7 pagesApplication of Artificial Neural NetworkRahul Kumar JhaNo ratings yet
- The Review of Intelligent Mechanical Engineering Based On Artificial Neural NetworkDocument5 pagesThe Review of Intelligent Mechanical Engineering Based On Artificial Neural Networkhassnain iqbalNo ratings yet
- Nuclear PP Diagnosis FaultDocument9 pagesNuclear PP Diagnosis FaultsuderNo ratings yet
- Aerospace Science and Technology: Vincenzo Pesce, Stefano Silvestrini, Michèle LavagnaDocument10 pagesAerospace Science and Technology: Vincenzo Pesce, Stefano Silvestrini, Michèle LavagnaheryuanoNo ratings yet
- A Deep Neuro-Fuzzy Network For Image ClassificationDocument10 pagesA Deep Neuro-Fuzzy Network For Image ClassificationdatthNo ratings yet
- Special NNDocument22 pagesSpecial NN901Anirudha ShivarkarNo ratings yet
- Comparison Between Beta Wavelets NeuralDocument6 pagesComparison Between Beta Wavelets NeuralWajdi BELLILNo ratings yet
- NCC 2016 7561206Document6 pagesNCC 2016 7561206Gautham SgNo ratings yet
- Artificial Neural NetworkDocument20 pagesArtificial Neural NetworkSibabrata Choudhury100% (2)
- Unscented Kalmana FilterDocument6 pagesUnscented Kalmana FilterImrul AshrafNo ratings yet
- Lecure 1 - IntroductionDocument45 pagesLecure 1 - Introductionvandunggroup5526No ratings yet
- Modelling The Indentation Force Response of Non-Uniform Soft Tissue Using A Recurrent Neural NetworkDocument6 pagesModelling The Indentation Force Response of Non-Uniform Soft Tissue Using A Recurrent Neural NetworkverdiNo ratings yet
- A Novel Algorithm For Fault Classification in Transmission Lines Using A Combined Adaptive Network and Fuzzy Inference SystemDocument12 pagesA Novel Algorithm For Fault Classification in Transmission Lines Using A Combined Adaptive Network and Fuzzy Inference Systematheer lu'ayNo ratings yet
- An Introduction To Neural NetworksDocument13 pagesAn Introduction To Neural NetworksWalaa GabrNo ratings yet
- A Brief Review of Feed-Forward Neural NetworksDocument8 pagesA Brief Review of Feed-Forward Neural NetworksmenakadevieceNo ratings yet
- Fast and Stable Interval Bounds Propagation For Training Verifiably Robust Models PDFDocument6 pagesFast and Stable Interval Bounds Propagation For Training Verifiably Robust Models PDFGopinath BalamuruganNo ratings yet
- BCI DeepLearningDocument9 pagesBCI DeepLearningapurv shuklaNo ratings yet
- A Brief Review of D-Forward Neural NetworksDocument8 pagesA Brief Review of D-Forward Neural NetworksDana AbkhNo ratings yet
- Convolutional Neural Network TutorialDocument8 pagesConvolutional Neural Network TutorialGiri PrakashNo ratings yet
- An Empirical Comparison of Node Pruning Methods For Layered Feed-Forward Neural NetworksDocument6 pagesAn Empirical Comparison of Node Pruning Methods For Layered Feed-Forward Neural NetworksBryan PeñalozaNo ratings yet
- Prediction of Dispersion Relation and Pbgs in 2-D Pcs by Using Artificial Neural NetworksDocument3 pagesPrediction of Dispersion Relation and Pbgs in 2-D Pcs by Using Artificial Neural NetworksISI IndiaNo ratings yet
- Measurement-Based Load ModelingDocument5 pagesMeasurement-Based Load ModelingPedro De Leon GuerraNo ratings yet
- Implementation of A Library For Artificial Neural Networks in CDocument10 pagesImplementation of A Library For Artificial Neural Networks in COscar OlivaresNo ratings yet
- Research Article: Deep Convolutional Extreme Learning Machine and Its Application in Handwritten Digit ClassificationDocument11 pagesResearch Article: Deep Convolutional Extreme Learning Machine and Its Application in Handwritten Digit ClassificationsyarahNo ratings yet
- Feature Selection For MLP Neural NetworkDocument23 pagesFeature Selection For MLP Neural NetworkaNo ratings yet
- Nguyễn Văn QuýDocument10 pagesNguyễn Văn Quýquyhoi2k2No ratings yet
- Face Recognition Based On Chaotic Fuzzy RBF Neural Network: Meng Jian-Liang Gao Wan-Qing Pang Hui-Jing Niu Wei-HuaDocument4 pagesFace Recognition Based On Chaotic Fuzzy RBF Neural Network: Meng Jian-Liang Gao Wan-Qing Pang Hui-Jing Niu Wei-HuaHarry YuliansyahNo ratings yet
- Low-Power High-Accuracy Seizure Detection Algorithms For Neural Implantable PlatformsDocument4 pagesLow-Power High-Accuracy Seizure Detection Algorithms For Neural Implantable PlatformsshalvinNo ratings yet
- A Brief Review of Feed-Forward Neural NetworksDocument8 pagesA Brief Review of Feed-Forward Neural NetworksYitayew TegodNo ratings yet
- Man Herle Lazea DAAAMDocument2 pagesMan Herle Lazea DAAAMSergiu ManNo ratings yet
- Artifical Neural NetworkDocument7 pagesArtifical Neural NetworkAby MathewNo ratings yet
- A Model Reference Control Structure Using A Fuzzy Neural NetworkDocument22 pagesA Model Reference Control Structure Using A Fuzzy Neural NetworkMitchell Angel Gomez OrtegaNo ratings yet
- An Immunological Approach To Initialize Centers of Radial Basis Function Neural NetworksDocument6 pagesAn Immunological Approach To Initialize Centers of Radial Basis Function Neural NetworksTéoTavaresNo ratings yet
- Diagrammatic Derivation of Gradient Algorithms For Neural NetworksDocument23 pagesDiagrammatic Derivation of Gradient Algorithms For Neural NetworksjoseNo ratings yet
- Bio Inspired Computing: Fundamentals and Applications for Biological Inspiration in the Digital WorldFrom EverandBio Inspired Computing: Fundamentals and Applications for Biological Inspiration in the Digital WorldNo ratings yet
- (Shin'Ichi Yuta, Hajime Asama, Sebastian Thrun, Er (BookFi)Document543 pages(Shin'Ichi Yuta, Hajime Asama, Sebastian Thrun, Er (BookFi)Francisco SantosNo ratings yet
- TFM EnriqueDocument182 pagesTFM EnriqueFrancisco SantosNo ratings yet
- Ni 9024Document20 pagesNi 9024FraFraFra87No ratings yet
- LCD Grafico 128X64 KS108 VerdeDocument12 pagesLCD Grafico 128X64 KS108 VerdeFrancisco SantosNo ratings yet
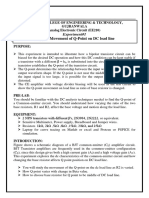
- Experiment - 1 Study of Movement of Q-PointDocument4 pagesExperiment - 1 Study of Movement of Q-Pointyasir0% (1)
- Electronics Prof. D.C. Dube Department of Physics Indian Institute of Technology, DelhiDocument14 pagesElectronics Prof. D.C. Dube Department of Physics Indian Institute of Technology, DelhiShazeb AtaNo ratings yet
- Apply For Ethiopian Passport Online Dawit1Document2 pagesApply For Ethiopian Passport Online Dawit1Loza LozaNo ratings yet
- OBIA Upgrade GuideDocument502 pagesOBIA Upgrade Guidebhupendra005100% (1)
- Full TextDocument34 pagesFull TextAina Nadhirah100% (2)
- Design and Simulation of 12 Elements Yagi-Uda Antenna For UHF Channel 14 (485 MHZ)Document4 pagesDesign and Simulation of 12 Elements Yagi-Uda Antenna For UHF Channel 14 (485 MHZ)Mansoor SultanNo ratings yet
- Cable Fault Locators SPG40 Article Cable Fault Location Cable Fault LocatorsDocument4 pagesCable Fault Locators SPG40 Article Cable Fault Location Cable Fault LocatorsViet MusicChannelNo ratings yet
- GISD - Maintenance Safety RulesDocument15 pagesGISD - Maintenance Safety RulesHarry Wart WartNo ratings yet
- The East Gate CenterDocument4 pagesThe East Gate CenterHector Oliver100% (1)
- General Introduction About MbaDocument71 pagesGeneral Introduction About MbashagulhameedlNo ratings yet
- Fire Resistant Armoured Power Cable-Bs 7846 F120 600/1000 V Ultimate Protection For Electrical Emergency SystemsDocument16 pagesFire Resistant Armoured Power Cable-Bs 7846 F120 600/1000 V Ultimate Protection For Electrical Emergency SystemsBhagoo HatheyNo ratings yet
- Mecon-Medidor de Flujo - Mod. TD Turbo Lux 3Document4 pagesMecon-Medidor de Flujo - Mod. TD Turbo Lux 3JoelCristhianVivancoCondeNo ratings yet
- Testing and Commissioning of GRP Water TankDocument6 pagesTesting and Commissioning of GRP Water TankEN ES VH CaliwagNo ratings yet
- Part List - Piston & Rod Group PDFDocument2 pagesPart List - Piston & Rod Group PDFRahulNo ratings yet
- Composite Materials Used For UAVDocument3 pagesComposite Materials Used For UAVAkashNo ratings yet
- Indian Power Sector Power Sector Is Going Through A Hyper Growth PhaseDocument35 pagesIndian Power Sector Power Sector Is Going Through A Hyper Growth PhaseAditya SawantNo ratings yet
- Accounting Software Vendors Revealed 2010 EditionDocument46 pagesAccounting Software Vendors Revealed 2010 EditionJohn Ray ManaoNo ratings yet
- 10 RiserDocument46 pages10 RiserAnshul Shukla100% (1)
- AEQ Eagle User Manual PDFDocument76 pagesAEQ Eagle User Manual PDFanother87No ratings yet
- Air Charge-Air Cooling: Diesel Engine-Generator SetDocument4 pagesAir Charge-Air Cooling: Diesel Engine-Generator SetredaNo ratings yet
- Developing A Web Project For JasperReportsDocument23 pagesDeveloping A Web Project For JasperReportsPayal MohantyNo ratings yet
- GD L ExemptionDocument36 pagesGD L ExemptionMoeed IqbalNo ratings yet
- Male, DOB: 15 September, 1997: Client Acquisition and Relationship ManagementDocument2 pagesMale, DOB: 15 September, 1997: Client Acquisition and Relationship ManagementIshwarjot Singh WaliaNo ratings yet
- Ec601 Database System Topic 4Document75 pagesEc601 Database System Topic 4Wazir ZafranNo ratings yet
- Varta Silver Dynamic AGM - 560901068D852Document3 pagesVarta Silver Dynamic AGM - 560901068D852cmlad1No ratings yet
- Projects Disserations ListDocument247 pagesProjects Disserations ListRohit JainNo ratings yet
- Tunnel EngineeringDocument39 pagesTunnel EngineeringHanamant Hunashikatti100% (1)
- Trina 440W Vertex-S+ DatasheetDocument2 pagesTrina 440W Vertex-S+ DatasheetBrad MannNo ratings yet
- Draft Survey 9 PDF FreeDocument2 pagesDraft Survey 9 PDF FreeCesar HerreraNo ratings yet