Download as pdf or txt
You might also like
- As and A Level Physics Core Practical 3 Emf and Internal Resistance StudentDocument5 pagesAs and A Level Physics Core Practical 3 Emf and Internal Resistance StudentAmeerHamzaa100% (1)
- Sodium To Phosphate RatioDocument16 pagesSodium To Phosphate RatioKanchan100% (5)
- Feature Selection UNIT 4Document40 pagesFeature Selection UNIT 4sujitha100% (2)
- Drop Weight Tear Testing of High Toughness Pipeline MaterialDocument8 pagesDrop Weight Tear Testing of High Toughness Pipeline MaterialKK SinghNo ratings yet
- UsersGuide deltaECDocument285 pagesUsersGuide deltaECHakan AteşNo ratings yet
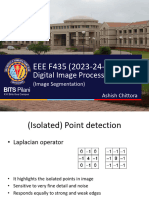
- Image Segmentation-Upload1Document41 pagesImage Segmentation-Upload1Monark MehtaNo ratings yet
- Chapter 3 PPTDocument138 pagesChapter 3 PPTShilpa KumariNo ratings yet
- Spatial Filtering: CS474/674 - Prof. BebisDocument55 pagesSpatial Filtering: CS474/674 - Prof. BebisNitheeshNo ratings yet
- Lecture 3Document37 pagesLecture 3bedline.salesNo ratings yet
- Lecture Week 2A 2018 PDFDocument89 pagesLecture Week 2A 2018 PDFalfalfa manNo ratings yet
- WINSEM2020-21 CSE4019 ETH VL2020210504006 Reference Material II 23-Mar-2021 Image SegmentationDocument25 pagesWINSEM2020-21 CSE4019 ETH VL2020210504006 Reference Material II 23-Mar-2021 Image SegmentationMajety S LskshmiNo ratings yet
- Pointshop 3D: An Interactive System For Point-Based Surface EditingDocument29 pagesPointshop 3D: An Interactive System For Point-Based Surface EditingVinicius PaulinoNo ratings yet
- Spatial FilteringDocument50 pagesSpatial FilteringeduhelloNo ratings yet
- Digital Image Processing: Image Enhancement in The Spatial DomainDocument139 pagesDigital Image Processing: Image Enhancement in The Spatial DomainShahrukh PatelNo ratings yet
- IT5409 Ch3 Filters 20200228 v3 Part1Document120 pagesIT5409 Ch3 Filters 20200228 v3 Part1Bui Minh DucNo ratings yet
- 30-07-2022 Unit2bDocument66 pages30-07-2022 Unit2bSarnithaNo ratings yet
- Lecture 2Document42 pagesLecture 2bedline.salesNo ratings yet
- 14.camera CalibrationDocument25 pages14.camera CalibrationUsman MaqboolNo ratings yet
- Digital Image Processing (Chapter 3) PDFDocument84 pagesDigital Image Processing (Chapter 3) PDFmna shourovNo ratings yet
- Unit - 4 Image Enhancement (Part A)Document52 pagesUnit - 4 Image Enhancement (Part A)xx69dd69xxNo ratings yet
- Chapter 03Document57 pagesChapter 03北科大-廖羿婷No ratings yet
- Spatial Filtering (Chapter 3) : CS474/674 - Prof. BebisDocument48 pagesSpatial Filtering (Chapter 3) : CS474/674 - Prof. BebisVithubhavani S HNo ratings yet
- Dip 03 37Document37 pagesDip 03 37dogedogedogedoge42No ratings yet
- DIP Mod 4 Segement Part BDocument39 pagesDIP Mod 4 Segement Part BshivubhavvNo ratings yet
- Imen 3Document213 pagesImen 3Moazzam HussainNo ratings yet
- Spatial Domain Image Processing)Document64 pagesSpatial Domain Image Processing)Getachew Yizengaw Enyew0% (1)
- Lectures 1 and 2 CEN545Document10 pagesLectures 1 and 2 CEN545Shafayet UddinNo ratings yet
- EdgeDetectionMain 2Document102 pagesEdgeDetectionMain 2ShreyaSharmaNo ratings yet
- DIP LectureDocument42 pagesDIP Lecturemajdiyjalalm2No ratings yet
- Scale Invariant Feature Transform (SIFT) : CS 763 Ajit RajwadeDocument52 pagesScale Invariant Feature Transform (SIFT) : CS 763 Ajit RajwadeashuraNo ratings yet
- Lec 7Document39 pagesLec 7Sravankumar KastooriNo ratings yet
- Segment 5Document100 pagesSegment 5priyaNo ratings yet
- Till Point Processing2023 WMDocument91 pagesTill Point Processing2023 WMSASNo ratings yet
- IT5409 Ch3 Filters 20200228 v3 Part1Document144 pagesIT5409 Ch3 Filters 20200228 v3 Part1Nguyễn Đình LâmNo ratings yet
- Image SegmentationDocument36 pagesImage SegmentationA JNo ratings yet
- EECE 5639 Computer Vision I: Filtering, Probability ReviewDocument54 pagesEECE 5639 Computer Vision I: Filtering, Probability ReviewSourabh Sisodia SrßNo ratings yet
- Image EnhancementDocument84 pagesImage Enhancementyogini choudharyNo ratings yet
- RestorationDocument65 pagesRestorationNisa ZairaNo ratings yet
- Edge Detection and Corner Detection NewDocument39 pagesEdge Detection and Corner Detection Newvignesh waranNo ratings yet
- Mathematical Tools in DIP - 2Document52 pagesMathematical Tools in DIP - 2sahilNo ratings yet
- Today's Lecture: Repetition and Refinement of Image BasicsDocument36 pagesToday's Lecture: Repetition and Refinement of Image BasicsAli KassabNo ratings yet
- ImageBasic - 0.1haDocument92 pagesImageBasic - 0.1haDương Lê HồngNo ratings yet
- Lect 6Document34 pagesLect 6Hermain KarimNo ratings yet
- Image Enhancement II-24-66Document43 pagesImage Enhancement II-24-66AshaNo ratings yet
- Marr HildrethDocument36 pagesMarr HildrethMatteoNo ratings yet
- SIFT TransformDocument50 pagesSIFT Transformk191292 Hassan JamilNo ratings yet
- 03 - Digital Image FundamentalsDocument58 pages03 - Digital Image FundamentalsMohamed Abd El EmamNo ratings yet
- Computing Stable Equilibrium Stances of A Legged Robot in Frictional EnvironmentsDocument40 pagesComputing Stable Equilibrium Stances of A Legged Robot in Frictional EnvironmentsSharmila83No ratings yet
- Image Enchancement in Spatial DomainDocument117 pagesImage Enchancement in Spatial DomainMalluri LokanathNo ratings yet
- Cp467 12 Lecture17 SegmentationDocument66 pagesCp467 12 Lecture17 Segmentationsatyastriver1518No ratings yet
- Chapter2 Image FormationDocument68 pagesChapter2 Image FormationGhassan HasnainNo ratings yet
- Dip S8ece Module3Document87 pagesDip S8ece Module3Neeraja JohnNo ratings yet
- Shao Xiong2015Document5 pagesShao Xiong2015Thông VõNo ratings yet
- 03.DIP. FilteringDocument36 pages03.DIP. FilteringMeii QuỳnhNo ratings yet
- DIP Notes Unit-2Document159 pagesDIP Notes Unit-2gfgfdgfNo ratings yet
- Pattern Recognition: C G (P) G (F (M) )Document143 pagesPattern Recognition: C G (P) G (F (M) )Ahmad RasyidNo ratings yet
- Introduction To Robot Vision: Ziv Yaniv Computer Aided Interventions and Medical Robotics, Georgetown UniversityDocument28 pagesIntroduction To Robot Vision: Ziv Yaniv Computer Aided Interventions and Medical Robotics, Georgetown UniversityVishnu PriyanNo ratings yet
- 18DIP Lab 3Document9 pages18DIP Lab 3Abdul AhadNo ratings yet
- Digital Image Representation - Unit1Document26 pagesDigital Image Representation - Unit1renukaNo ratings yet
- Scale Invariant Feature Transform (SIFT)Document24 pagesScale Invariant Feature Transform (SIFT)Willy Ivan SatriaNo ratings yet
- VFX HW2Document4 pagesVFX HW2評No ratings yet
- Image EnhancementsDocument79 pagesImage Enhancementsvaibhav rajNo ratings yet
- Scanline Rendering: Exploring Visual Realism Through Scanline Rendering TechniquesFrom EverandScanline Rendering: Exploring Visual Realism Through Scanline Rendering TechniquesNo ratings yet
- Hidden Line Removal: Unveiling the Invisible: Secrets of Computer VisionFrom EverandHidden Line Removal: Unveiling the Invisible: Secrets of Computer VisionNo ratings yet
- PO Attainment - Table - 5Document2 pagesPO Attainment - Table - 5Daljit SinghNo ratings yet
- PO Attainment - Table - 2Document1 pagePO Attainment - Table - 2Daljit SinghNo ratings yet
- PO Attainment - Table - 3Document1 pagePO Attainment - Table - 3Daljit SinghNo ratings yet
- Assignment 2 ITC 2020 GneDocument2 pagesAssignment 2 ITC 2020 GneDaljit SinghNo ratings yet
- PO Attainment - Table - 1Document1 pagePO Attainment - Table - 1Daljit SinghNo ratings yet
- Assignment 3 ITC - 2020 GneDocument1 pageAssignment 3 ITC - 2020 GneDaljit SinghNo ratings yet
- Assignment 2 ITC 2020 GneDocument2 pagesAssignment 2 ITC 2020 GneDaljit SinghNo ratings yet
- Tutorial Sheet ITC GneDocument1 pageTutorial Sheet ITC GneDaljit SinghNo ratings yet
- Assignment 1 ITC - 2020 GneDocument2 pagesAssignment 1 ITC - 2020 GneDaljit SinghNo ratings yet
- Class Test 1 (Set - ) ELE528: Programmable Logic Controller SEEE Section-E3E08 Group - Lovely Professional University Time:: 45min Date: 2 Sep, 2013 MM:: 30Document1 pageClass Test 1 (Set - ) ELE528: Programmable Logic Controller SEEE Section-E3E08 Group - Lovely Professional University Time:: 45min Date: 2 Sep, 2013 MM:: 30Daljit SinghNo ratings yet
- Presentation On Fast Access Technologies: By:-Gurpreet RathoreDocument25 pagesPresentation On Fast Access Technologies: By:-Gurpreet RathoreDaljit SinghNo ratings yet
- DQDB and Fddi GneDocument9 pagesDQDB and Fddi GneDaljit SinghNo ratings yet
- DOS - Lpu - Jal AttackDocument13 pagesDOS - Lpu - Jal AttackDaljit SinghNo ratings yet
- OSI Model TCP/IP Model: Cable ModemDocument36 pagesOSI Model TCP/IP Model: Cable ModemDaljit SinghNo ratings yet
- Asymmetric Digital Subscriber Line - GneDocument4 pagesAsymmetric Digital Subscriber Line - GneDaljit SinghNo ratings yet
- Savard 2024 J. Phys. Conf. Ser. 2743 012003Document7 pagesSavard 2024 J. Phys. Conf. Ser. 2743 012003Merkuria KaryantinaNo ratings yet
- Csec Physics Lab ListDocument5 pagesCsec Physics Lab ListJC100% (2)
- 3.2 Mass Ma 4 KG Rests On Top of Mass MB 5kg That Rests On A FricDocument7 pages3.2 Mass Ma 4 KG Rests On Top of Mass MB 5kg That Rests On A Fricsoumengoswami10No ratings yet
- RCPC Report G1Document35 pagesRCPC Report G1Jancarl TelanNo ratings yet
- Geometric Tolerance For Shafts & HolesDocument47 pagesGeometric Tolerance For Shafts & HolesPrakash ChandrasekaranNo ratings yet
- Final YearDocument51 pagesFinal YearAnand Kumar0% (1)
- ZZ - Introduction To Lorentz Geometry Curves and Surfaces by Alexandre Lymberopoulos and Ivo Terek CoutoDocument351 pagesZZ - Introduction To Lorentz Geometry Curves and Surfaces by Alexandre Lymberopoulos and Ivo Terek Coutorajesh kumarNo ratings yet
- Telecom Italia Open Access Telecom Italia Lab SirtiDocument26 pagesTelecom Italia Open Access Telecom Italia Lab SirtiquikeblazNo ratings yet
- ASTM E1672-12 Standard Guide For Computed Tomography (CT) System SelectionDocument10 pagesASTM E1672-12 Standard Guide For Computed Tomography (CT) System SelectiondaiweijueNo ratings yet
- Dan Flavin Through The Eyes of Death of The AuthorDocument4 pagesDan Flavin Through The Eyes of Death of The AuthorMarshall BergNo ratings yet
- IB100 Conformal Coating Inspection Booth Technical Brochure 170209Document2 pagesIB100 Conformal Coating Inspection Booth Technical Brochure 170209Lee Hitchens100% (1)
- Research Article: Electromagnetic Interference Between Cranes and Broadcasting AntennasDocument11 pagesResearch Article: Electromagnetic Interference Between Cranes and Broadcasting AntennasIndermohan MehtaNo ratings yet
- Class 12 Physics ProjectDocument8 pagesClass 12 Physics ProjectManaswini JhaNo ratings yet
- LaserDocument20 pagesLasertsrockon28No ratings yet
- Full Download Ebook Ebook PDF Introduction To Electrodynamics 4Th Edition PDFDocument37 pagesFull Download Ebook Ebook PDF Introduction To Electrodynamics 4Th Edition PDFlaura.bunce187100% (54)
- EMS ResultDocument2 pagesEMS Resultmohdaamir0141No ratings yet
- Code490En 1Document32 pagesCode490En 1Erick MoraNo ratings yet
- SKYMARK C-Series Water-Cooled Self-Contained Units Catalog (1112)Document24 pagesSKYMARK C-Series Water-Cooled Self-Contained Units Catalog (1112)Carlos MelgarNo ratings yet
- Nitrogen Adsorption Isotherms On Carbonaceous Materials - Gomez-Serrano Et Al 2000Document6 pagesNitrogen Adsorption Isotherms On Carbonaceous Materials - Gomez-Serrano Et Al 2000ianphilanderNo ratings yet
- Phasec: Unrivalled Inspection Power in A Portable PackageDocument2 pagesPhasec: Unrivalled Inspection Power in A Portable PackageLuthfi ArdiansyahNo ratings yet
- Alan - Macdonald 2012 A.survey - Of.geometric - Algebra.and - Geometric.calculusDocument33 pagesAlan - Macdonald 2012 A.survey - Of.geometric - Algebra.and - Geometric.calculusgiantgeorgeNo ratings yet
- A Literature Review of Wind Turbines Icing ProblemsDocument8 pagesA Literature Review of Wind Turbines Icing Problemsrahul parmarNo ratings yet
- Screenshot 2023-12-27 at 3.40.36 AMDocument1 pageScreenshot 2023-12-27 at 3.40.36 AMridumaheshkumarNo ratings yet
- Induction Heating Coil DesignDocument20 pagesInduction Heating Coil Designbitconcepts9781100% (1)
- TN2 12VDocument5 pagesTN2 12VJavierPariNo ratings yet
- CV211 Lab 2Document7 pagesCV211 Lab 2Khuresh ShahNo ratings yet