Download as pdf or txt
You might also like
- Andritz Decanter Centrifuges - BrochureDocument3 pagesAndritz Decanter Centrifuges - BrochureCentrifugal SeparatorNo ratings yet
- Technical Specifications of CHP NTPC 3x500 MWDocument762 pagesTechnical Specifications of CHP NTPC 3x500 MWSHIVAJI CHOUDHURY100% (1)
- Access Request Management (ARQ) Debugging Scenarios - Governance, Risk and Compliance - SCN WikiDocument26 pagesAccess Request Management (ARQ) Debugging Scenarios - Governance, Risk and Compliance - SCN WikiGautam MalhotraNo ratings yet
- STATCOM Modeling For Voltage and Angle Stability Studies: Claudio A. Ca NizaresDocument20 pagesSTATCOM Modeling For Voltage and Angle Stability Studies: Claudio A. Ca NizaresFreddy TamayoNo ratings yet
- DC MotorDocument6 pagesDC MotoroshyenNo ratings yet
- Tuning of RLS-Active Vibration Controller Using Genetic AlgorithmDocument6 pagesTuning of RLS-Active Vibration Controller Using Genetic AlgorithmAmeen ShaikhNo ratings yet
- The Control Based On The Genetic Algorithm For Nonlinear SVC SystemsDocument8 pagesThe Control Based On The Genetic Algorithm For Nonlinear SVC SystemserpublicationNo ratings yet
- Advanced Generation Control With Economic DispatchDocument9 pagesAdvanced Generation Control With Economic Dispatchhunghtd_snuNo ratings yet
- On_Zero_Steady_State_Error_Voltage_ContrDocument13 pagesOn_Zero_Steady_State_Error_Voltage_ContrNghĩa LêNo ratings yet
- Prediction of Subharmonic Oscillation in Switching Converters Under Different Control StrategiesDocument5 pagesPrediction of Subharmonic Oscillation in Switching Converters Under Different Control StrategiespabloNo ratings yet
- Electric Charging Control With MatlbaDocument4 pagesElectric Charging Control With MatlbaJoshua Fransisco SilalahiNo ratings yet
- A Three-Phase PWM Rectifier Using A Linear Active Disturbance Rejection ControlDocument6 pagesA Three-Phase PWM Rectifier Using A Linear Active Disturbance Rejection ControlAli BOUKHRISSNo ratings yet
- Robust Control of Servo DC Motor: LMI Approach: Petru DOBRA, Gheorghe LAZEA, Daniel MOGA and Mirela TRUŞCĂDocument6 pagesRobust Control of Servo DC Motor: LMI Approach: Petru DOBRA, Gheorghe LAZEA, Daniel MOGA and Mirela TRUŞCĂyuli maulizaNo ratings yet
- PSO Based Adaptive Terminal Sliding Mode Controllers For A DC-DC ConverterDocument5 pagesPSO Based Adaptive Terminal Sliding Mode Controllers For A DC-DC ConverterDung Huynh XuanNo ratings yet
- Regulacija Pozicije, Brzine I Ubrzanja Aktuatora Korištenjem Optimalne Estimacije StanjaDocument10 pagesRegulacija Pozicije, Brzine I Ubrzanja Aktuatora Korištenjem Optimalne Estimacije Stanjabig horseNo ratings yet
- Tcscpower PDFDocument7 pagesTcscpower PDFGeniusAtwork2021No ratings yet
- Design of Stable Fuzzy Controllers For An AGVDocument8 pagesDesign of Stable Fuzzy Controllers For An AGVMihai Alexandru OlaruNo ratings yet
- 63i6 Ijaet0612715 PDFDocument8 pages63i6 Ijaet0612715 PDFmmrNo ratings yet
- Back-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMDocument9 pagesBack-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMSaranji GuruNo ratings yet
- Robust Computer Control An Inverted Pendulum: Medrano-CerdaDocument10 pagesRobust Computer Control An Inverted Pendulum: Medrano-CerdaVictor PassosNo ratings yet
- Generalized Rail Clamping Sequences Based PWM (GRCPWM) Algorithm For Direct Torque Controlled Induction Motor DriveDocument22 pagesGeneralized Rail Clamping Sequences Based PWM (GRCPWM) Algorithm For Direct Torque Controlled Induction Motor DriveHari ReddyNo ratings yet
- Modeling and Simulation of Static Var CoDocument3 pagesModeling and Simulation of Static Var Cotran duyNo ratings yet
- Disturbance Compensation For Gun Control System of Tank Based On LADRC (289KB)Document4 pagesDisturbance Compensation For Gun Control System of Tank Based On LADRC (289KB)Suresh SNo ratings yet
- Development of A 10kw Single Phase Igbt Inverter For Grid Connected PV ApplicationsDocument24 pagesDevelopment of A 10kw Single Phase Igbt Inverter For Grid Connected PV ApplicationsAhmed Abd AlRahmanNo ratings yet
- 10 JPF 10 de 13Document24 pages10 JPF 10 de 13Abdo AbdoNo ratings yet
- chương 1.2.3Document6 pageschương 1.2.3Đạt TriNo ratings yet
- 22 Buckboost Converter Control With Fuzzy Logic ApproachDocument8 pages22 Buckboost Converter Control With Fuzzy Logic Approachapi-19508046No ratings yet
- Cherat I 2011Document5 pagesCherat I 2011RNo ratings yet
- Space State PowerDocument6 pagesSpace State PowerIVAN DARIO JARAMILLO TORRESNo ratings yet
- Gence Li 1993Document12 pagesGence Li 1993Luis CarvalhoNo ratings yet
- Iccad49821 2020 9260559Document5 pagesIccad49821 2020 9260559mezianeNo ratings yet
- Tuning of Control Loops For Grid Connected Voltage Source ConvertersDocument6 pagesTuning of Control Loops For Grid Connected Voltage Source ConvertersThiago Moura GalvãoNo ratings yet
- Automatic Loop Shaping in MIMO QFT Using Interval Consistency Based Optimization Technique PDFDocument6 pagesAutomatic Loop Shaping in MIMO QFT Using Interval Consistency Based Optimization Technique PDFGeorge ChenNo ratings yet
- Effective Estimation of Speed and Rotor Position of A PM Synchronous Motor Drive by A Kalman FiltDocument7 pagesEffective Estimation of Speed and Rotor Position of A PM Synchronous Motor Drive by A Kalman FiltAli H. NumanNo ratings yet
- 1986 A New Synchronous Current Regulator and An Analysis of Current-Regulated PWM Inverters PDFDocument13 pages1986 A New Synchronous Current Regulator and An Analysis of Current-Regulated PWM Inverters PDFdhirajlovesmaaNo ratings yet
- Backstepping Control of Wind Energy System With Multilevel InverterDocument6 pagesBackstepping Control of Wind Energy System With Multilevel InvertermahaNo ratings yet
- Direct and Indirect Self-Tuning Generalized Minimum Variance ControlDocument12 pagesDirect and Indirect Self-Tuning Generalized Minimum Variance ControlSadagopan RajaNo ratings yet
- Excitation Control of Synchronous Generators Using Fuzzy TechniqueDocument6 pagesExcitation Control of Synchronous Generators Using Fuzzy TechniquewilliamNo ratings yet
- Pole-Placement Designs of Power System StabilizersDocument7 pagesPole-Placement Designs of Power System StabilizersabelcatayNo ratings yet
- Digsilent Powerfactory: Technical Reference DocumentationDocument23 pagesDigsilent Powerfactory: Technical Reference DocumentationmalecadNo ratings yet
- DTC-SVM Scheme For Induction Motors Fed With A Three-Level InverterDocument5 pagesDTC-SVM Scheme For Induction Motors Fed With A Three-Level Inverterdam_dar666No ratings yet
- January 2013 1357052271 0df99 30Document2 pagesJanuary 2013 1357052271 0df99 30jagat.5763No ratings yet
- Fuzzy Sliding Mode Controller (FSMC) With Global Stabilization and Saturation Function For Tracking Control of A Robotic ManipulatorDocument7 pagesFuzzy Sliding Mode Controller (FSMC) With Global Stabilization and Saturation Function For Tracking Control of A Robotic ManipulatormaryfghNo ratings yet
- A Digital Control Technique For A Single Phase PWM InverterDocument3 pagesA Digital Control Technique For A Single Phase PWM Invertersa920189No ratings yet
- Non-Linear Predictive Control of A DC-to-DC ConverterDocument5 pagesNon-Linear Predictive Control of A DC-to-DC ConvertermenguemengueNo ratings yet
- Cuk Control PDFDocument57 pagesCuk Control PDFPraveen PJNo ratings yet
- Full-Order Terminal Sliding Mode Control For Boost ConverterDocument5 pagesFull-Order Terminal Sliding Mode Control For Boost ConverterAbderrahman LahouaouiNo ratings yet
- Chaper 7 Voltage Regulation: Presentation #1Document24 pagesChaper 7 Voltage Regulation: Presentation #1Sabri BouloumaNo ratings yet
- A Novel PRD Control Method Damping Resonance in Grid-Connected Three-Phase SVPWM CurrentDocument5 pagesA Novel PRD Control Method Damping Resonance in Grid-Connected Three-Phase SVPWM CurrentArsham5033No ratings yet
- 164 T494 PDFDocument6 pages164 T494 PDFSaksham PathrolNo ratings yet
- Optimal Control of CSTR: Kalpesh Pathak, Anil Markana and Nishant ParikhDocument4 pagesOptimal Control of CSTR: Kalpesh Pathak, Anil Markana and Nishant ParikhGilbert GospelNo ratings yet
- Model Predictive Control of Single Phase Grid-Connected InverterDocument4 pagesModel Predictive Control of Single Phase Grid-Connected InverterDaniel PGNo ratings yet
- LMI Robust Control Design For Boost PWM Converters: C. Olalla R. Leyva A. El Aroudi P. Garce S I. QueinnecDocument11 pagesLMI Robust Control Design For Boost PWM Converters: C. Olalla R. Leyva A. El Aroudi P. Garce S I. QueinnecVinícius BaconNo ratings yet
- DTC Drive With ANN-Based Stator Flux Estimator (2005)Document10 pagesDTC Drive With ANN-Based Stator Flux Estimator (2005)leosensNo ratings yet
- A Model-Free Continuous Integral Sliding Mode Controller For Robust Control of Robotic ManipulatorsDocument14 pagesA Model-Free Continuous Integral Sliding Mode Controller For Robust Control of Robotic ManipulatorsIAES International Journal of Robotics and AutomationNo ratings yet
- Digital-Controller Parameter-Tuning Application Supply: To Switch-Mode PowerDocument6 pagesDigital-Controller Parameter-Tuning Application Supply: To Switch-Mode PowerReza GhanavatiNo ratings yet
- (1993) A Sequential Quadratic Programming-Based Algorithm For Optimization of Gas NetworksDocument12 pages(1993) A Sequential Quadratic Programming-Based Algorithm For Optimization of Gas NetworksJONATHAN JUSTINO APOS CASSIMIRONo ratings yet
- A Digital Realization of Audio Dynamic Range ControlDocument4 pagesA Digital Realization of Audio Dynamic Range ControlRujian YuNo ratings yet
- 2021 Integrated MIMO Fault Detection and Disturbance Observer-Based ControDocument10 pages2021 Integrated MIMO Fault Detection and Disturbance Observer-Based ControThanh Hai NguyenNo ratings yet
- A New, Continuous-Time Model For Current-Mode ControlDocument10 pagesA New, Continuous-Time Model For Current-Mode ControlChuang BiNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Model Predictive ControlDocument26 pagesModel Predictive Controlrodrigo_trentiniNo ratings yet
- The Effects of System Extension On Inter-Area OscillationsDocument2 pagesThe Effects of System Extension On Inter-Area Oscillationsrodrigo_trentiniNo ratings yet
- Review On Robust Control For SISO SystemsDocument7 pagesReview On Robust Control For SISO Systemsrodrigo_trentiniNo ratings yet
- Basics Solutions ParametrizationDocument4 pagesBasics Solutions Parametrizationrodrigo_trentiniNo ratings yet
- Encoder SickDocument20 pagesEncoder Sickrodrigo_trentiniNo ratings yet
- Or CadDocument7 pagesOr CadPaul TanasescuNo ratings yet
- TM-1818 AVEVA Everything3D - (2.1) Support (CN)Document153 pagesTM-1818 AVEVA Everything3D - (2.1) Support (CN)yuehui niuNo ratings yet
- GSM Problems, Solutions and Real Case StudiesDocument36 pagesGSM Problems, Solutions and Real Case StudiesRye Marasigan100% (1)
- Extrusion Design GuideDocument12 pagesExtrusion Design GuideL.A. AlumíniosNo ratings yet
- Logiq Book User ManualDocument664 pagesLogiq Book User ManualLuisFer Garcia100% (2)
- Trenchless Technologies ManualDocument186 pagesTrenchless Technologies ManualLuis Fernando Leon Lecca100% (1)
- A Cero - Modular HouseDocument1 pageA Cero - Modular HouseBil AndersenNo ratings yet
- Technical Specifications: Motor GraderDocument8 pagesTechnical Specifications: Motor GraderHerry ArsevenNo ratings yet
- Biomedical OVR OCCURRENCE VARIANCE ACCIDENTDocument2 pagesBiomedical OVR OCCURRENCE VARIANCE ACCIDENTEhsan alwafaaNo ratings yet
- Munications For Railway Applications K5t8u Iji8fDocument135 pagesMunications For Railway Applications K5t8u Iji8fAlfrecron Oneone100% (1)
- API For Acr120s Smart CardDocument0 pagesAPI For Acr120s Smart CardAldrin Jay MoralesNo ratings yet
- ASTM E84 - 19b Standard Test Method For Surface Burning Characteristics of Building Materials PDFDocument6 pagesASTM E84 - 19b Standard Test Method For Surface Burning Characteristics of Building Materials PDFKishor BaruahNo ratings yet
- EA - Maturity ModelDocument12 pagesEA - Maturity ModelAntonius SonyNo ratings yet
- Specification of PCL ProductsDocument2 pagesSpecification of PCL ProductstharezNo ratings yet
- Abalioglu - Kullanım - Klavuzu - ING PDFDocument251 pagesAbalioglu - Kullanım - Klavuzu - ING PDFCan YEŞİLNo ratings yet
- PublicationsDocument189 pagesPublicationsRah MliNo ratings yet
- Honeywell CH4 Detector ManualDocument84 pagesHoneywell CH4 Detector ManualsteveNo ratings yet
- Analog Device Installation and PLC ProgrammingDocument22 pagesAnalog Device Installation and PLC Programmingmarina890416No ratings yet
- Steam Sterilization and The 2007 Revision of PDA Technical Report 1Document59 pagesSteam Sterilization and The 2007 Revision of PDA Technical Report 1Carlos Medina Cisterna100% (5)
- 600-EQ-014 Operation Manual Stripping Machine PDFDocument90 pages600-EQ-014 Operation Manual Stripping Machine PDFcorasaulNo ratings yet
- Genuine Aircraft Hardware Co.: Clamp, Loop Type, Cushioned, SupportDocument4 pagesGenuine Aircraft Hardware Co.: Clamp, Loop Type, Cushioned, SupportJessica Martinez PáezNo ratings yet
- Concentration of SolutionsDocument15 pagesConcentration of SolutionsAnonymous 9uu04elNo ratings yet
- Section 5.5: Standard Enthalpies of Formation: H N H N HDocument8 pagesSection 5.5: Standard Enthalpies of Formation: H N H N HhairtNo ratings yet
- Gravadores de Vídeo Giga: Tabela de Hds CompatíveisDocument3 pagesGravadores de Vídeo Giga: Tabela de Hds CompatíveisRenato Barros de Moraes FilhoNo ratings yet
- Electrical and Plumbing BOQDocument2 pagesElectrical and Plumbing BOQLynGarciaPaulinoNo ratings yet
- HP2 - Ra13Document174 pagesHP2 - Ra13YCE 2011No ratings yet
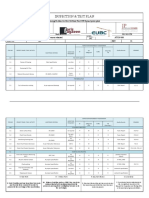
- Inspection & Test PlanDocument2 pagesInspection & Test PlanKhaled GamalNo ratings yet