Download as pdf or txt
You might also like
- Lecture 1bDocument10 pagesLecture 1bYusuf GulNo ratings yet
- Vibs Lecture 2Document16 pagesVibs Lecture 2elcaelcaNo ratings yet
- 3 Free Vibration LectureDocument16 pages3 Free Vibration LectureKhalil KhdourNo ratings yet
- 10P NewtonsSecondLaw 1Document11 pages10P NewtonsSecondLaw 1Naman GuptaNo ratings yet
- Lectur 10 UploadDocument13 pagesLectur 10 UploadYash RajNo ratings yet
- DS 16 PDFDocument12 pagesDS 16 PDFAryan BhattaraiNo ratings yet
- 10 Wave Equations 20 Sept 2016Document36 pages10 Wave Equations 20 Sept 2016Faisal Khotibul AmriNo ratings yet
- Lecture Series 04 - Coupled OscillatorsDocument23 pagesLecture Series 04 - Coupled OscillatorsSUBIR KUMAR DasNo ratings yet
- Lecture 1cDocument15 pagesLecture 1cYusuf GulNo ratings yet
- EAT216 - Vibration 20191008Document47 pagesEAT216 - Vibration 20191008ibrahim ibrahimNo ratings yet
- H2 MYE Revision Package Differential Equations SolutionsDocument6 pagesH2 MYE Revision Package Differential Equations SolutionsTimothy HandokoNo ratings yet
- Chapter 2 Response To Harmonic Excitation: Introduces The Important Concept of ResonanceDocument100 pagesChapter 2 Response To Harmonic Excitation: Introduces The Important Concept of Resonanceasif aliNo ratings yet
- Finite Element Method For Structural Dynamic and Stability AnalysesDocument56 pagesFinite Element Method For Structural Dynamic and Stability AnalysesabimalainNo ratings yet
- Taller Dinamica: Universidad Del Atlántico Departamento de IngieneriaDocument5 pagesTaller Dinamica: Universidad Del Atlántico Departamento de IngieneriaIsaias ArroyoNo ratings yet
- Goldberg Kaplan RileyDocument22 pagesGoldberg Kaplan RileyMichael VuNo ratings yet
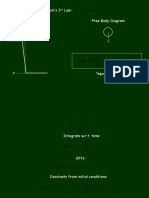
- Newton's 2 Law: Free Body Diagram: Xo YoDocument7 pagesNewton's 2 Law: Free Body Diagram: Xo Yowahied11No ratings yet
- X Denote The Proportion of Susceptible y Denote The Proportion of CarriersDocument1 pageX Denote The Proportion of Susceptible y Denote The Proportion of CarriersneetiNo ratings yet
- Structural Dynamics NotesDocument61 pagesStructural Dynamics Noteskpsd58625No ratings yet
- Oscillation Motion: T Cos A T XDocument10 pagesOscillation Motion: T Cos A T XNoviNo ratings yet
- Extremal TraceDocument16 pagesExtremal TraceMouliNo ratings yet
- Nonlinear Programming: Chemical Engineering Department National Tsing-Hua University Prof. Shi-Shang Jang May, 2003Document33 pagesNonlinear Programming: Chemical Engineering Department National Tsing-Hua University Prof. Shi-Shang Jang May, 2003Maurice MonjereziNo ratings yet
- SheetDocument1 pageSheetCem BizNo ratings yet
- Sheet 1Document1 pageSheet 1Cem BizNo ratings yet
- Free VibrationDocument8 pagesFree Vibrationrafi alamNo ratings yet
- Free Vibration of One Degree of Freedom Systems: Initial DeviationDocument8 pagesFree Vibration of One Degree of Freedom Systems: Initial DeviationEugine BalomagaNo ratings yet
- Free Vibration of One Degree of Freedom Systems: Initial DeviationDocument8 pagesFree Vibration of One Degree of Freedom Systems: Initial DeviationEugine BalomagaNo ratings yet
- MES 307 GM Getaran Paksa HarmonisDocument38 pagesMES 307 GM Getaran Paksa HarmonisNanda Diyah PitalokaNo ratings yet
- Equation SheetDocument4 pagesEquation SheetMaría Carrascosa JimenezNo ratings yet
- WORK POWER ENERGY-03-Subjective SolvedDocument11 pagesWORK POWER ENERGY-03-Subjective SolvedRaju SinghNo ratings yet
- Damped Motion: Damping ForceDocument15 pagesDamped Motion: Damping ForceAnisha RanaNo ratings yet
- Vibration and Noise 354: Harmonic Response of Damped and Undamped Systems 1&2 August 2016Document5 pagesVibration and Noise 354: Harmonic Response of Damped and Undamped Systems 1&2 August 2016Morena MoremoholoNo ratings yet
- V F y D M MG DT X D M V: Newton's 2 Law: Free Body DiagramDocument7 pagesV F y D M MG DT X D M V: Newton's 2 Law: Free Body DiagramHasratiNo ratings yet
- Eigen Value Problem - MDOF Free VibrationDocument18 pagesEigen Value Problem - MDOF Free Vibrationbhupender ghosliyaNo ratings yet
- P4 Exercise 6GDocument3 pagesP4 Exercise 6GPffflyers KurnawanNo ratings yet
- Continuous Probability DistributionDocument12 pagesContinuous Probability DistributionLAKSH RAMASWAMYNo ratings yet
- Week01Module06 UnDampedFreeDocument15 pagesWeek01Module06 UnDampedFreeNoor MohdNo ratings yet
- Lab 3Document7 pagesLab 3Ghulam QasimNo ratings yet
- Week 08 Assignment 08 SolnDocument4 pagesWeek 08 Assignment 08 SolnsuneethaNo ratings yet
- Chapter 5 FourierDocument85 pagesChapter 5 Fourieryug varshneyNo ratings yet
- 7.1 Differentiate by First Principles 6Document7 pages7.1 Differentiate by First Principles 6Hin Wa LeungNo ratings yet
- Course Outline: Chapter 1. IntroductionDocument21 pagesCourse Outline: Chapter 1. IntroductionBill WilliamsNo ratings yet
- MathsDocument9 pagesMathsZeel PatelNo ratings yet
- Dynamic Response of Mdof Structures-Part 2: by DR - Kabtamu G, Ju, Jit, Civil Eng Dept Feb2021Document59 pagesDynamic Response of Mdof Structures-Part 2: by DR - Kabtamu G, Ju, Jit, Civil Eng Dept Feb2021Mohammed B TuseNo ratings yet
- MIT8 03SCF16 Lec6 PDFDocument5 pagesMIT8 03SCF16 Lec6 PDFRohan JoshiNo ratings yet
- Final Fall 17 18Document6 pagesFinal Fall 17 18Yousef AlanaziNo ratings yet
- 13 Analisis Riwayat WaktuDocument9 pages13 Analisis Riwayat WaktuNabila Aisyah RomadhonaNo ratings yet
- Solution Finding Accel ErationDocument5 pagesSolution Finding Accel ErationIsaias ArroyoNo ratings yet
- Lecture 2 Robust and Optimal ControlDocument7 pagesLecture 2 Robust and Optimal ControlRoger BertranNo ratings yet
- G3 RLC CircuitsDocument7 pagesG3 RLC CircuitsProtsenko IgorNo ratings yet
- An Introduction TO Mechanics of Piping Stress Analysis (Part-IV)Document23 pagesAn Introduction TO Mechanics of Piping Stress Analysis (Part-IV)Jaydev ChakrabortyNo ratings yet
- Free 1dof Und Vibrat-1Document20 pagesFree 1dof Und Vibrat-1Erick AzcárateNo ratings yet
- Bending of Beams: Pure Bending Timoshenko Beam TheoryDocument12 pagesBending of Beams: Pure Bending Timoshenko Beam TheoryChad FreemanNo ratings yet
- CH 3Document66 pagesCH 3DANIEL WELDAYNo ratings yet
- Oscillations and Waves - Oct - 24 - Oct - 28Document40 pagesOscillations and Waves - Oct - 24 - Oct - 28Abhijeet SinghNo ratings yet
- Lecture 1aDocument19 pagesLecture 1aYusuf GulNo ratings yet
- Supplementary InfoDocument12 pagesSupplementary InfoLiu HCNo ratings yet
- Chapter 2 Free Vibration of Single Degree of FreedomDocument107 pagesChapter 2 Free Vibration of Single Degree of Freedomsenthilcae100% (1)
- Pattern Recognition and Machine Learning: Fuzzy Sets in Pattern Recognition Debrup Chakraborty CinvestavDocument15 pagesPattern Recognition and Machine Learning: Fuzzy Sets in Pattern Recognition Debrup Chakraborty CinvestavAvishek ChandraNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Visual Acuity: LightingDocument16 pagesVisual Acuity: LightingMorena MoremoholoNo ratings yet
- Tut Test 200212 MemoDocument1 pageTut Test 200212 MemoMorena MoremoholoNo ratings yet
- 2018 01 29 ReportTemplate 7Document34 pages2018 01 29 ReportTemplate 7Morena MoremoholoNo ratings yet
- IE 414 Group 36 Phase 2Document2 pagesIE 414 Group 36 Phase 2Morena MoremoholoNo ratings yet
- IE414 - A3 Part2 2020 Case Study QuestionDocument4 pagesIE414 - A3 Part2 2020 Case Study QuestionMorena MoremoholoNo ratings yet
- Figure 1: AISI 4140 Round BarsDocument3 pagesFigure 1: AISI 4140 Round BarsMorena MoremoholoNo ratings yet
- Continuation Letter - TELesofe - 20116799 PDFDocument1 pageContinuation Letter - TELesofe - 20116799 PDFMorena MoremoholoNo ratings yet
- Thermo Fluid PracticalDocument5 pagesThermo Fluid PracticalMorena MoremoholoNo ratings yet
- Developing The Aircraft Performance RequirementsDocument2 pagesDeveloping The Aircraft Performance RequirementsMorena MoremoholoNo ratings yet
- Vibration and Noise 354: e F T F T F e A T XDocument2 pagesVibration and Noise 354: e F T F T F e A T XMorena MoremoholoNo ratings yet
- Vibration and Noise 354: Harmonic Response of Damped and Undamped Systems 1&2 August 2016Document5 pagesVibration and Noise 354: Harmonic Response of Damped and Undamped Systems 1&2 August 2016Morena MoremoholoNo ratings yet
- Long-Range FM TransmitterDocument1 pageLong-Range FM TransmitterMallieswaran SubbaiyanNo ratings yet
- Motor Selection ExampleDocument11 pagesMotor Selection ExampleMorena MoremoholoNo ratings yet
- Aspect SlidesDocument45 pagesAspect SlidesDiana SabahNo ratings yet
- Problemas Cap 2 33-47Document3 pagesProblemas Cap 2 33-47Gian Soriano MNo ratings yet
- Bk91 1310 CPF 114 Mef Das 0003 - C - Data Sheet For Stabilizer (CPF 114 C 03cpf 214 C 03)Document34 pagesBk91 1310 CPF 114 Mef Das 0003 - C - Data Sheet For Stabilizer (CPF 114 C 03cpf 214 C 03)Anonymous bHh1L1No ratings yet
- Power System PinoybixDocument31 pagesPower System PinoybixRouel LeonenNo ratings yet
- Waukesha Gas Engines: Ratings & Standards 275GL+ Load AcceptanceDocument2 pagesWaukesha Gas Engines: Ratings & Standards 275GL+ Load AcceptancearasNo ratings yet
- End Plate Beam To Column Moment ConnectionDocument84 pagesEnd Plate Beam To Column Moment ConnectionNguyen Duc CuongNo ratings yet
- Bending in BeamDocument13 pagesBending in BeamDANIELNo ratings yet
- AASHTO LRFDLTS-1-I5-2015 (2022 Interim Revisions) .Document88 pagesAASHTO LRFDLTS-1-I5-2015 (2022 Interim Revisions) .tracyhopyNo ratings yet
- Penetrant TestingDocument36 pagesPenetrant Testingkumarmm1234100% (1)
- Basic VibrationDocument76 pagesBasic VibrationJack Adam100% (2)
- Affan Telek - Limiting Reactants WorksheetDocument5 pagesAffan Telek - Limiting Reactants WorksheetAffan TelekNo ratings yet
- Meeting 6 - Evaporation - English For THPDocument4 pagesMeeting 6 - Evaporation - English For THPAlvianNo ratings yet
- Polymer Compositions InjectionDocument14 pagesPolymer Compositions InjectionJessiNo ratings yet
- Settlement and TerzaghiDocument3 pagesSettlement and TerzaghiAngel TantayNo ratings yet
- Wood Thermal PropertiesDocument6 pagesWood Thermal PropertiesKevonSingh1No ratings yet
- You Raise Me Up With NameDocument20 pagesYou Raise Me Up With NameMrs. DarcyNo ratings yet
- A0020A Laser Linewidth Measurement System: Keysight Technologies and SYCATUSDocument2 pagesA0020A Laser Linewidth Measurement System: Keysight Technologies and SYCATUStreejumboNo ratings yet
- Aurora Borealis - PHYSICSDocument11 pagesAurora Borealis - PHYSICSnaishasingh.10No ratings yet
- REFLECTION PAPER - Chem FinalDocument4 pagesREFLECTION PAPER - Chem FinalDevon JayNo ratings yet
- Heat ExchangersDocument5 pagesHeat ExchangersRyan MagasoNo ratings yet
- Iv. Heat Transfer in ReactorsDocument9 pagesIv. Heat Transfer in ReactorsDagim HailuNo ratings yet
- R22 Physical PropertiesDocument1 pageR22 Physical PropertiesGhulam HussainNo ratings yet
- Tensile Test PresentationDocument36 pagesTensile Test PresentationalkharfaneNo ratings yet
- Sway Bracing:: PW P P, P PDocument3 pagesSway Bracing:: PW P P, P PShafiullah AmanNo ratings yet
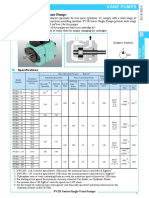
- Bk-6-Latest EIC-B-1002-0 (PV2R Series Single Pumps)Document30 pagesBk-6-Latest EIC-B-1002-0 (PV2R Series Single Pumps)RAYNo ratings yet
- Parul University: Subject: PHYSICS Semester: I - Academic Year 2017-18Document1 pageParul University: Subject: PHYSICS Semester: I - Academic Year 2017-18Trilok AkhaniNo ratings yet
- Brochure NFF 800Document1 pageBrochure NFF 800Jimmy Flores SilesNo ratings yet
- 03 BoltzGibbsShannonDocument30 pages03 BoltzGibbsShannonroxy8marie8chanNo ratings yet
- States of Matter Phet Colorado Ws - Doc 3Document4 pagesStates of Matter Phet Colorado Ws - Doc 3aarianaNo ratings yet
- Pressure Temperature PhETDocument6 pagesPressure Temperature PhETMiNH HayatNo ratings yet