Download as pdf or txt
You might also like
- Salt&water Electricity Generating Power BankDocument37 pagesSalt&water Electricity Generating Power BankJen Ny Gee Dugaduga0% (1)
- Guide For Capacitor Recharging in Delta AC Motor DrivesDocument3 pagesGuide For Capacitor Recharging in Delta AC Motor DrivesMuhamad BadarNo ratings yet
- Power Systems Modeling: M. Tech. First Semester (Integrated Power System / Power Elect. & Power System) (C.B.C.S.)Document2 pagesPower Systems Modeling: M. Tech. First Semester (Integrated Power System / Power Elect. & Power System) (C.B.C.S.)Mahesh ShendeNo ratings yet
- Paper 8 - Additional Losses - Damper Winding - Hydrogenerators at Open-Circuit and Load Conditions - Traxler-SamekDocument7 pagesPaper 8 - Additional Losses - Damper Winding - Hydrogenerators at Open-Circuit and Load Conditions - Traxler-SamekNicolás NielsenNo ratings yet
- BEE Final Power Protection and SwitchgearDocument3 pagesBEE Final Power Protection and SwitchgearKumaranNo ratings yet
- Designandanalysisofwindings FinalpaperDocument5 pagesDesignandanalysisofwindings Finalpapersandro.loukasNo ratings yet
- An Analysis DC-Machine Commutation: JapanDocument9 pagesAn Analysis DC-Machine Commutation: JapanDanang AjiNo ratings yet
- General Model of A Five-Phase Induction Machine Allowing For Harmonics in The Air Gap FieldDocument9 pagesGeneral Model of A Five-Phase Induction Machine Allowing For Harmonics in The Air Gap FieldElayne HolandaNo ratings yet
- dl1330 June2015Document2 pagesdl1330 June2015Ruma SinhaNo ratings yet
- 22 Electrical Machine Design May 2018 PDFDocument4 pages22 Electrical Machine Design May 2018 PDFBalaji DhanabalNo ratings yet
- Intermittent Line-to-Ground Faults in Generator Stator Windings and Consequences On Neutral GroundingDocument6 pagesIntermittent Line-to-Ground Faults in Generator Stator Windings and Consequences On Neutral GroundingjuanNo ratings yet
- Name: Reg - No. Sixth Semester B.Tech Degree Examination, JUNE 2009Document2 pagesName: Reg - No. Sixth Semester B.Tech Degree Examination, JUNE 2009maniNo ratings yet
- 2007 Nonis TCAS CML Divider DesignDocument10 pages2007 Nonis TCAS CML Divider DesignDavidNo ratings yet
- 30 Electrical Machines Design Sep 2021Document2 pages30 Electrical Machines Design Sep 2021Balaji DhanabalNo ratings yet
- Switchgear & Protection: B.E. (Electrical Engineering (Electronics & Power) (Old) / Power Engineering) Eighth SemesterDocument2 pagesSwitchgear & Protection: B.E. (Electrical Engineering (Electronics & Power) (Old) / Power Engineering) Eighth SemesterSylvesterNo ratings yet
- Compatibility Design of Non Salient Pole Synchronous GeneratorDocument4 pagesCompatibility Design of Non Salient Pole Synchronous GeneratorEditor IJTSRDNo ratings yet
- Design Guideline For Hairpin WindingDocument7 pagesDesign Guideline For Hairpin WindingXiaoShan LIUNo ratings yet
- Complex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocument9 pagesComplex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsAdil AbouelhassanNo ratings yet
- A Low-Phase-Noise 5-GHz CMOS Quadrature VCO Using Superharmonic CouplingDocument7 pagesA Low-Phase-Noise 5-GHz CMOS Quadrature VCO Using Superharmonic CouplingSai GaganNo ratings yet
- B E M E E, 2013: 2 Marks Reserved For Neat and Well Organized AnswersDocument3 pagesB E M E E, 2013: 2 Marks Reserved For Neat and Well Organized Answersrony RkNo ratings yet
- Answer Key EE19601 PROTECTION AND SWITCHGEAR END SEM QPDocument10 pagesAnswer Key EE19601 PROTECTION AND SWITCHGEAR END SEM QPshreeNo ratings yet
- Design and Performance Analysis of Axial Flux Permanent Magnet Machines With Double-Stator Dislocation Using A Combined Wye-Delta ConnectionDocument7 pagesDesign and Performance Analysis of Axial Flux Permanent Magnet Machines With Double-Stator Dislocation Using A Combined Wye-Delta ConnectionWill TedjoNo ratings yet
- EL 403-Power SystemDocument54 pagesEL 403-Power SystemkaruppusamymariNo ratings yet
- Mar - 2023Document2 pagesMar - 2023Praveen BadeNo ratings yet
- Inductances LD LQ Reluctance: The and MachinesDocument7 pagesInductances LD LQ Reluctance: The and MachinesHERNAN ALONSO BRAVO URREANo ratings yet
- ML023030070 USNRC Power Plant Engineering 3Document170 pagesML023030070 USNRC Power Plant Engineering 3MutahirrasoolNo ratings yet
- Generalized Theory of Electrical Machines-A Review: Dr. Sandip MehtaDocument5 pagesGeneralized Theory of Electrical Machines-A Review: Dr. Sandip MehtaDanang AjiNo ratings yet
- On The Evolution of Ac Machines For Spindle Drive ApplicationsDocument6 pagesOn The Evolution of Ac Machines For Spindle Drive ApplicationshasanNo ratings yet
- Discontinuous SVPWM TechniquesDocument6 pagesDiscontinuous SVPWM TechniquesAnonymous 1D3dCWNcNo ratings yet
- Performance Evaluation of A Five Phase Modular Externa - 2012 - Alexandria EnginDocument13 pagesPerformance Evaluation of A Five Phase Modular Externa - 2012 - Alexandria EnginMulugeta GebrieNo ratings yet
- Design and Tests of A FaulttolerantDocument8 pagesDesign and Tests of A Faulttolerantrakeshee2007No ratings yet
- Work RDDS IEL 11923455 622b3fbedc0c6Document6 pagesWork RDDS IEL 11923455 622b3fbedc0c6LIU LINo ratings yet
- 20 Electrical Machine Disign Nov 2017 PDFDocument2 pages20 Electrical Machine Disign Nov 2017 PDFBalaji DhanabalNo ratings yet
- Electric Technology - IDocument2 pagesElectric Technology - Ianon_463330020No ratings yet
- Fault TolerantDocument6 pagesFault Tolerantrakeshee2007No ratings yet
- Questions & Answers On Commutation Process & Excitation MethodsDocument23 pagesQuestions & Answers On Commutation Process & Excitation Methodskibrom atsbhaNo ratings yet
- Analysis of Turbine Generator Rotor Winding Shorted TurnsDocument8 pagesAnalysis of Turbine Generator Rotor Winding Shorted Turns세진박No ratings yet
- A Push-Pull Class-C CMOS VCO: Andrea Mazzanti, Member, IEEE, and Pietro Andreani, Senior Member, IEEEDocument9 pagesA Push-Pull Class-C CMOS VCO: Andrea Mazzanti, Member, IEEE, and Pietro Andreani, Senior Member, IEEEJeong-geun KimNo ratings yet
- Complex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocument8 pagesComplex Vector Model of The Squirrel Cage Induction Machine Including Instantaneous Rotor Bar CurrentsJorge Luis SotoNo ratings yet
- A CMOS Bandgap ReferenceDocument10 pagesA CMOS Bandgap ReferencemeslonNo ratings yet
- Power Transformer DesignDocument4 pagesPower Transformer DesignMetalloyNo ratings yet
- Modeling and Characterization of On-Chip TransformersDocument4 pagesModeling and Characterization of On-Chip TransformersshuangwenNo ratings yet
- P.E.S. College of Engineering, Mandya - 571 401Document2 pagesP.E.S. College of Engineering, Mandya - 571 401manoharaNo ratings yet
- Très Important - Dimensionnement D2LDocument8 pagesTrès Important - Dimensionnement D2LSafaAffiNo ratings yet
- Design of 6.6 KV, 100 A Saturated DC Reactor Type Superconducting Fault Current LimiterDocument4 pagesDesign of 6.6 KV, 100 A Saturated DC Reactor Type Superconducting Fault Current LimiterwaleedkhanpelNo ratings yet
- W-17 EMC-II Question PaperDocument2 pagesW-17 EMC-II Question PaperPrasanna P TitarmareNo ratings yet
- Design of Synchronous MachineDocument25 pagesDesign of Synchronous MachineHiren KapadiaNo ratings yet
- 60W Audio Amplifier KT88 - Another AmplifierDocument2 pages60W Audio Amplifier KT88 - Another AmplifierBogdan Alexandru RusuNo ratings yet
- ELECTRICAL MACHINES-II-ELECTRICAL-5th-2021-22Document2 pagesELECTRICAL MACHINES-II-ELECTRICAL-5th-2021-22sameer mohantyNo ratings yet
- Unit 4 Three Phase Induction Motor Design - Part 1Document31 pagesUnit 4 Three Phase Induction Motor Design - Part 1Prema ElizabethNo ratings yet
- Energy Conversion and Management: G.K. Singh, A. Senthil Kumar, R.P. SainiDocument12 pagesEnergy Conversion and Management: G.K. Singh, A. Senthil Kumar, R.P. Sainideenaraja1990No ratings yet
- SGP PDFDocument4 pagesSGP PDFpadmajasivaNo ratings yet
- Higher Pole Number Synchronous Reluctance Machines With Fractional Slot Concentrated WindingsDocument6 pagesHigher Pole Number Synchronous Reluctance Machines With Fractional Slot Concentrated WindingsELL750 MEMNo ratings yet
- Unbalanced Magnetic ForcesDocument10 pagesUnbalanced Magnetic Forcesrakeshee2007No ratings yet
- The Resonant Link Converter-A New Concept in Static Power ConversionDocument9 pagesThe Resonant Link Converter-A New Concept in Static Power ConversionDar JahangeerNo ratings yet
- Switchgear and Protection: B.E. Eighth Semester (Electrical Engineering (Electronics & Power) / Power Engineering) (Old)Document2 pagesSwitchgear and Protection: B.E. Eighth Semester (Electrical Engineering (Electronics & Power) / Power Engineering) (Old)SylvesterNo ratings yet
- EMd Model Paper - 3 - Dec 2020Document3 pagesEMd Model Paper - 3 - Dec 20201DA19EE004 AMBUJ KUMAR MISHRANo ratings yet
- Switch Gear & ProtectionDocument4 pagesSwitch Gear & Protectionmohit patleNo ratings yet
- A Novel Topology For A Voltage Source Inverter With Reduced Transistor Count and Utilizing Naturally Commutated Thyristors With Simple CommutationDocument6 pagesA Novel Topology For A Voltage Source Inverter With Reduced Transistor Count and Utilizing Naturally Commutated Thyristors With Simple Commutationfarid kerroucheNo ratings yet
- Differential Forms on Electromagnetic NetworksFrom EverandDifferential Forms on Electromagnetic NetworksRating: 4 out of 5 stars4/5 (1)
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- 10 Transcript Lec10Document6 pages10 Transcript Lec10rakeshee2007No ratings yet
- 9 Transcript Lec09Document6 pages9 Transcript Lec09rakeshee2007No ratings yet
- 11 - Lecture 11 - Logical Reasoning Syllogistic Logic Part 02Document3 pages11 - Lecture 11 - Logical Reasoning Syllogistic Logic Part 02rakeshee2007No ratings yet
- 12 - Logical Reasoning Syllogism Logic Truth and ValidityDocument6 pages12 - Logical Reasoning Syllogism Logic Truth and Validityrakeshee2007No ratings yet
- 11 - Logical Reasoning Syllogistic Logic Part 02 - Lec11Document10 pages11 - Logical Reasoning Syllogistic Logic Part 02 - Lec11rakeshee2007No ratings yet
- 12 - Lecture 12 - Logical Reasoning Syllogism Logic, Truth and ValidityDocument2 pages12 - Lecture 12 - Logical Reasoning Syllogism Logic, Truth and Validityrakeshee2007No ratings yet
- 8 - Lecture 8 - Logical Reasoning Deductive Logic Part 01Document2 pages8 - Lecture 8 - Logical Reasoning Deductive Logic Part 01rakeshee2007No ratings yet
- 10 - Lecture 10 - Logical Reasoning Syllogistic Logic Part 01Document2 pages10 - Lecture 10 - Logical Reasoning Syllogistic Logic Part 01rakeshee2007No ratings yet
- 9 - Lecture 9 - Logical Reasoning Deductive Logic Part 02Document2 pages9 - Lecture 9 - Logical Reasoning Deductive Logic Part 02rakeshee2007No ratings yet
- 7 - Lecture 7 - Logical Reasoning Inductive LogicDocument4 pages7 - Lecture 7 - Logical Reasoning Inductive Logicrakeshee2007No ratings yet
- Design and Control of A Three-Phase Active Rectifier Under Non-Ideal Operating ConditionsDocument8 pagesDesign and Control of A Three-Phase Active Rectifier Under Non-Ideal Operating Conditionsrakeshee2007No ratings yet
- Principles and Applications of Static Thyristor Controlled Shunt CompensatorsDocument11 pagesPrinciples and Applications of Static Thyristor Controlled Shunt Compensatorsrakeshee2007No ratings yet
- IEEE - AHighStep-DownDC-DCConverterwithR CurrentRippleandLowVoltageStress1Document14 pagesIEEE - AHighStep-DownDC-DCConverterwithR CurrentRippleandLowVoltageStress1rakeshee2007No ratings yet
- Thelin - Nee - Analytical Calculation of The Airgap Flux Density of PMDocument6 pagesThelin - Nee - Analytical Calculation of The Airgap Flux Density of PMrakeshee2007No ratings yet
- Electrically RRDocument9 pagesElectrically RRrakeshee2007No ratings yet
- nds22 23eDocument2 pagesnds22 23ebehzadNo ratings yet
- Unit-2 EMIDocument71 pagesUnit-2 EMIsagarpandit2No ratings yet
- TA2512 Manual PDFDocument2 pagesTA2512 Manual PDFMariaNo ratings yet
- Slaughter 1305, 2503, 2510, 2550 OpsDocument42 pagesSlaughter 1305, 2503, 2510, 2550 OpsFabio TempelNo ratings yet
- NS BERO 2001 Chapter 4 Part2Document61 pagesNS BERO 2001 Chapter 4 Part2Pablo RosasNo ratings yet
- PV INVERTER Datasheet K7.1 PDFDocument24 pagesPV INVERTER Datasheet K7.1 PDFAdesta AswantaNo ratings yet
- Electronic Timer - Series Micon 225-4Document3 pagesElectronic Timer - Series Micon 225-4Rohit chavanNo ratings yet
- Switching Applications Solenoid Drive Applications Temperature Compensated For Audio Amplifier Output StageDocument5 pagesSwitching Applications Solenoid Drive Applications Temperature Compensated For Audio Amplifier Output StageRanfis Rojas BorgesNo ratings yet
- ZZ Vortex Regenerative BlowersDocument20 pagesZZ Vortex Regenerative BlowerstorrecillaNo ratings yet
- Technical Specification Instramed Cardiomax NewDocument6 pagesTechnical Specification Instramed Cardiomax NewDwi SanitaNo ratings yet
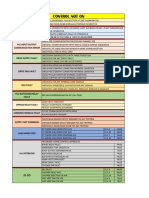
- Control Not On: Emergency Stop Activated Head Block Not ConnectedDocument1 pageControl Not On: Emergency Stop Activated Head Block Not ConnectedsukhenduNo ratings yet
- Philips Dect Cd170Document40 pagesPhilips Dect Cd170arpcproNo ratings yet
- Dm00064632 Spice Model Tutorial For Power Mosfets StmicroelectronicsDocument24 pagesDm00064632 Spice Model Tutorial For Power Mosfets Stmicroelectronicsjoao pedro pasconNo ratings yet
- SEL-849 Fail-Safe and Nonfail-Safe Tripping: Application Note AN2021-01Document6 pagesSEL-849 Fail-Safe and Nonfail-Safe Tripping: Application Note AN2021-01bonginkosibrutusNo ratings yet
- Cables CatalogDocument42 pagesCables Catalogyacinoo4No ratings yet
- APD900PDocument4 pagesAPD900PhizbullahNo ratings yet
- Smart Home Controller Using Node MCU Based On IOTDocument5 pagesSmart Home Controller Using Node MCU Based On IOTInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Petunjuk Pengoperasian Dan PemeliharaanDocument251 pagesPetunjuk Pengoperasian Dan PemeliharaanWahyu Tirta NugrahaNo ratings yet
- Electrical Machines Lab Project Proposal: Objective: Mutual Induction PrincipleDocument2 pagesElectrical Machines Lab Project Proposal: Objective: Mutual Induction PrincipleMuhammad HuzaifaNo ratings yet
- How Three-Way Switches WorkDocument5 pagesHow Three-Way Switches WorkAmr Ahmed ZeyadaNo ratings yet
- ECO XR3 CnDblock1 - 1Document1 pageECO XR3 CnDblock1 - 1ousamaNo ratings yet
- ESM740G TiristorDocument2 pagesESM740G Tiristorjosenicolas12000No ratings yet
- Small-Size Comb-Line Microstrip Narrow BPFDocument4 pagesSmall-Size Comb-Line Microstrip Narrow BPFShrutiAwasthiNo ratings yet
- Electronics Industrial TrainingDocument15 pagesElectronics Industrial TrainingShubham MakoneNo ratings yet
- Presentation On Speed Control of 1.5 HP DC Motor by Open Loop Control SystemDocument13 pagesPresentation On Speed Control of 1.5 HP DC Motor by Open Loop Control SystemAnkit GautamNo ratings yet
- EE 1352 Monograph UnitIVDocument17 pagesEE 1352 Monograph UnitIVafzalbaigsa100% (2)
- Essar Projects (India) LTD Welding Data Sheet: EPIL/A307/CDSP/SS/QAM/FM-006Document2 pagesEssar Projects (India) LTD Welding Data Sheet: EPIL/A307/CDSP/SS/QAM/FM-006manojkumarmurlidharaNo ratings yet
- Blts How To FlywheelDocument26 pagesBlts How To FlywheelPinkyNo ratings yet