Download as pdf or txt
You might also like
- Statics - Centroid & Center of MassDocument8 pagesStatics - Centroid & Center of MassEuw Chaiwanont100% (1)
- Essentials of Internal MedicineDocument832 pagesEssentials of Internal MedicineEmanuelMC100% (77)
- Primarchs DatasheetsDocument24 pagesPrimarchs DatasheetsJosiah Young1100% (5)
- 31comparison of Modified Smith Predictor andDocument5 pages31comparison of Modified Smith Predictor andRevathi SoundiranNo ratings yet
- H Design of Controllers Ensuring The Regulation of Currents of The Decoupled Field Orientation Control Applied To A Pms MotorDocument9 pagesH Design of Controllers Ensuring The Regulation of Currents of The Decoupled Field Orientation Control Applied To A Pms MotorSidahmed LarbaouiNo ratings yet
- Vapour Adiabatic Exponent For Flashing Flow in Nozzles: S.D. MorrisDocument7 pagesVapour Adiabatic Exponent For Flashing Flow in Nozzles: S.D. MorrisRonald Tipula RamosNo ratings yet
- Discrete-Time Fractional-Order PID Controller Definition, Tuning, DigitalDocument10 pagesDiscrete-Time Fractional-Order PID Controller Definition, Tuning, Digital9052359751No ratings yet
- PID Controller Tuning Methods: A Novel Teaching ApproachDocument9 pagesPID Controller Tuning Methods: A Novel Teaching Approachsmprabu24317No ratings yet
- Robust MIMO PID Controllers Tuning Based On Complex Real Ratio of The Characteristic Matriz EigenvaluesDocument9 pagesRobust MIMO PID Controllers Tuning Based On Complex Real Ratio of The Characteristic Matriz EigenvaluesEsther CozarNo ratings yet
- FOPDT Model CharacterizationDocument6 pagesFOPDT Model CharacterizationHugo EGNo ratings yet
- Analysis of The Performance of Streamline Simulation: Célio MaschioDocument10 pagesAnalysis of The Performance of Streamline Simulation: Célio MaschioAli DasmehNo ratings yet
- Empirical Models PDFDocument11 pagesEmpirical Models PDFAhmed HummerNo ratings yet
- Synergetic and Sliding Mode Controls of A PMSM: A Comparative StudyDocument5 pagesSynergetic and Sliding Mode Controls of A PMSM: A Comparative StudymellahNo ratings yet
- Petráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalDocument12 pagesPetráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalcharifNo ratings yet
- Sensors 14 23119Document18 pagesSensors 14 23119Krishna KumarNo ratings yet
- PLAXIS Implementation of HYPOPLASTICITY: David Ma S In February 19, 2014Document35 pagesPLAXIS Implementation of HYPOPLASTICITY: David Ma S In February 19, 2014Marco QuirozNo ratings yet
- Predictive Torque Control of Permanent Magnet Synchronous Motor Drive With Reduced Switching FrequencyDocument6 pagesPredictive Torque Control of Permanent Magnet Synchronous Motor Drive With Reduced Switching FrequencyYerramsetty SreekanthNo ratings yet
- Stata Lab4 2023Document36 pagesStata Lab4 2023Aadhav JayarajNo ratings yet
- CDC 2005 1583310Document6 pagesCDC 2005 1583310SowrirajanNo ratings yet
- Conte OpenSees Snopt A Framework For Finite Element Based Optimization 26oct2012 FinalDocument24 pagesConte OpenSees Snopt A Framework For Finite Element Based Optimization 26oct2012 Finalgreenday3No ratings yet
- Electronics 08 00221Document13 pagesElectronics 08 00221AMAN GOYALNo ratings yet
- G S D(S) N S D S N S D S: EC5: Control SystemsDocument7 pagesG S D(S) N S D S N S D S: EC5: Control SystemsMANOJ KUMAR DASNo ratings yet
- Macar2001 28Document8 pagesMacar2001 28Erick Renzo Hidalgo OrtegaNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument20 pagesController Design Based On Transient Response CriteriaGapuk MaboekNo ratings yet
- 1 The SPH Equations: I I I IDocument14 pages1 The SPH Equations: I I I IRafael S. MoraesNo ratings yet
- Mathematical Modeling of Power DC/DC: ConvertersDocument6 pagesMathematical Modeling of Power DC/DC: ConvertersStudents Xerox ChidambaramNo ratings yet
- 10 1 1 623 275 PDFDocument28 pages10 1 1 623 275 PDFDamir MiletaNo ratings yet
- DC Motor Speed Control Using Pid Controller: June 2005Document6 pagesDC Motor Speed Control Using Pid Controller: June 2005Juan Jose Borra GarciaNo ratings yet
- Internal Model Control: Part of A Set of Lecture Notes On Introduction To Robust Control by Ming T. Tham (2002)Document9 pagesInternal Model Control: Part of A Set of Lecture Notes On Introduction To Robust Control by Ming T. Tham (2002)jimi7No ratings yet
- Data-Based Approach To Feedback-Feedforward Controller Design From Closed-Loop Plant DataDocument6 pagesData-Based Approach To Feedback-Feedforward Controller Design From Closed-Loop Plant DataArif HidayatNo ratings yet
- Automatic Tuning of Pid Controller Using Fuzzy LogicDocument8 pagesAutomatic Tuning of Pid Controller Using Fuzzy LogicKha BùiNo ratings yet
- Sliding Mode Control Based On Fractional Order Calculus For DC-DC ConvertersDocument15 pagesSliding Mode Control Based On Fractional Order Calculus For DC-DC ConverterssathishNo ratings yet
- PID ControlDocument40 pagesPID ControlSśēmǾǿ ŔämáďañNo ratings yet
- Ieee CSL2021Document6 pagesIeee CSL2021Adriano Nogueira DrumondNo ratings yet
- Nonlinear Discrete-Time Integral Sliding Mode Control of An Induction Motor: Real-Time ImplementationDocument10 pagesNonlinear Discrete-Time Integral Sliding Mode Control of An Induction Motor: Real-Time Implementationdamaya1701No ratings yet
- Characteristic Mesh Grid Method For Transient Analysis of Natural Gas Flow in Pipelines NetworksDocument12 pagesCharacteristic Mesh Grid Method For Transient Analysis of Natural Gas Flow in Pipelines NetworksBakhytzhan AssilbekovNo ratings yet
- Introduction To Olecular Ynamics Simulations Using: M D LammpsDocument86 pagesIntroduction To Olecular Ynamics Simulations Using: M D Lammpskroidman100% (2)
- PI Control of FOTDS-1Document16 pagesPI Control of FOTDS-1Pushpesh Kr PandeyNo ratings yet
- State Space Models and The Kalman FilterDocument49 pagesState Space Models and The Kalman FilterMohammadNo ratings yet
- The Investigation of Gas Ejector Performance Using CFD ModellingDocument6 pagesThe Investigation of Gas Ejector Performance Using CFD ModellingmyskyshepherdNo ratings yet
- Modelling Discrete Time SystemsDocument6 pagesModelling Discrete Time SystemsSandeep KumarNo ratings yet
- Markets98 SMFM Appl PDFDocument10 pagesMarkets98 SMFM Appl PDFLester IngberNo ratings yet
- HJM ModelsDocument12 pagesHJM ModelsPrateek SabharwalNo ratings yet
- Homework 3Document3 pagesHomework 3Parvesh kambojNo ratings yet
- Robust H Control of A Scanning Tunneling Microscope Under Parametric UncertaintiesDocument6 pagesRobust H Control of A Scanning Tunneling Microscope Under Parametric UncertaintiesMishaalNo ratings yet
- Solving Burgers' Equation With Quantum ComputingDocument13 pagesSolving Burgers' Equation With Quantum Computingsingh_mathitbhu5790No ratings yet
- For Simulation (Study The System Output For A Given Input)Document28 pagesFor Simulation (Study The System Output For A Given Input)productforeverNo ratings yet
- Design and Implementation of A Self-Tuning Pid ControllerDocument6 pagesDesign and Implementation of A Self-Tuning Pid ControllerShreyas MaitreyaNo ratings yet
- Controller Tuning: CHME 624 Advance Process Dynamic Modelling & ControlDocument15 pagesController Tuning: CHME 624 Advance Process Dynamic Modelling & Controlali aljifriNo ratings yet
- Two-Degree-of-Freedom PID Controllers StructuresDocument14 pagesTwo-Degree-of-Freedom PID Controllers Structuresbhautik daxiniNo ratings yet
- Survey of Control Systems (MEM 800) PresentedDocument26 pagesSurvey of Control Systems (MEM 800) PresentedvananhbarcaNo ratings yet
- Figure 1: Air-Fuel Path (1) : Is TheDocument6 pagesFigure 1: Air-Fuel Path (1) : Is Thesopnashree jenaNo ratings yet
- Dissetacao MestradoDocument19 pagesDissetacao MestradoFernando LopesNo ratings yet
- ELEC30x0 Lab11 Characterization SlidesDocument22 pagesELEC30x0 Lab11 Characterization Slideswww.autovatorNo ratings yet
- Kohn Worgotter98Document13 pagesKohn Worgotter98cuitao42No ratings yet
- Model Predictive Control: Prof. Shi-Shang Jang National Tsing-Hua University Chemical Engineering DepartmentDocument44 pagesModel Predictive Control: Prof. Shi-Shang Jang National Tsing-Hua University Chemical Engineering DepartmentAayush PatidarNo ratings yet
- hw6 SolDocument11 pageshw6 SolAbdallah RedaNo ratings yet
- Reduced Order ControllerDocument6 pagesReduced Order Controllerabyss2000No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationFrom EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Hasil TOEFL Akbar Undip 2017Document14 pagesHasil TOEFL Akbar Undip 2017Aqmal FANo ratings yet
- Paper DCSDocument10 pagesPaper DCSAqmal FANo ratings yet
- Real Time Optimization EdDocument8 pagesReal Time Optimization EdAqmal FANo ratings yet
- Model Predictive Control of A Crude Distillation Unit PDFDocument6 pagesModel Predictive Control of A Crude Distillation Unit PDFHussaini Hamisu100% (1)
- Boiler Firing Control Design Using Model Predictive TechniquesDocument6 pagesBoiler Firing Control Design Using Model Predictive TechniquesAqmal FANo ratings yet
- DMC For BoilerDocument7 pagesDMC For BoilerAqmal FANo ratings yet
- Lec 31 FuzzysystemDocument11 pagesLec 31 FuzzysystemAqmal FANo ratings yet
- Perancangan Sistem Kontrol Proses Kolom Distilasi Minyak Mentah Berbasis AnfisDocument15 pagesPerancangan Sistem Kontrol Proses Kolom Distilasi Minyak Mentah Berbasis AnfisAqmal FANo ratings yet
- Perancangan Sistem Kontrol Proses Kolom Distilasi Minyak Mentah Berbasis AnfisDocument15 pagesPerancangan Sistem Kontrol Proses Kolom Distilasi Minyak Mentah Berbasis AnfisAqmal FANo ratings yet
- Perinatal Mental Health Policy BriefDocument3 pagesPerinatal Mental Health Policy BriefThe Wilson CenterNo ratings yet
- Remembering and ForgettingDocument12 pagesRemembering and ForgettingChrstn BuenaventuraNo ratings yet
- Asb - 212 10 140Document12 pagesAsb - 212 10 140smartasss100% (1)
- The Piano Lesson Hand Out - Ma Rainey QuizDocument5 pagesThe Piano Lesson Hand Out - Ma Rainey QuizJonathan GellertNo ratings yet
- Qi Project Poster Improving Nurse ResponsivnessDocument1 pageQi Project Poster Improving Nurse Responsivnessapi-446692943No ratings yet
- Bombardier CRJ 00-Environmental Control SystemDocument42 pagesBombardier CRJ 00-Environmental Control SystemVincent GuignotNo ratings yet
- OceanofPDF - Com Ruination - Anthony ReynoldsDocument440 pagesOceanofPDF - Com Ruination - Anthony ReynoldsiAmNewbita100% (1)
- Matrices of Violence: A Post-Structural Feminist Rendering of Nawal El Saadawi's Woman at Point Zero and Lola Soneyin's The Secrets of Baba Segi's WivesDocument6 pagesMatrices of Violence: A Post-Structural Feminist Rendering of Nawal El Saadawi's Woman at Point Zero and Lola Soneyin's The Secrets of Baba Segi's WivesIJELS Research JournalNo ratings yet
- Tender InformationDocument167 pagesTender InformationComments ModeratorNo ratings yet
- Rule 19 - Conduct of Vessels in RestrictedDocument58 pagesRule 19 - Conduct of Vessels in RestrictedMitch SpeederNo ratings yet
- CBC TMDocument108 pagesCBC TMChryz SantosNo ratings yet
- Genetic Memory PDFDocument5 pagesGenetic Memory PDFraba100No ratings yet
- IEC61850 Substation Communication ArchitectureDocument326 pagesIEC61850 Substation Communication ArchitectureMichael Parohinog Gregas100% (1)
- Statement of Principle Self-Care Including Self-Medication - The Professional Role of The PharmacistDocument5 pagesStatement of Principle Self-Care Including Self-Medication - The Professional Role of The PharmacistAprilia R. Permatasari0% (1)
- Filt Ers: 2 ElectrofiltersDocument8 pagesFilt Ers: 2 ElectrofiltersElancheran RengaNo ratings yet
- CH 12Document31 pagesCH 12asin12336No ratings yet
- EXEMPLAR - 1006HSV - Assessment 1a - Critical Analysis Reflective Essay - Draft Template - T323Document5 pagesEXEMPLAR - 1006HSV - Assessment 1a - Critical Analysis Reflective Essay - Draft Template - T323aryanrana20942No ratings yet
- Arcserve Professional Services Partner Certification 1Document1 pageArcserve Professional Services Partner Certification 1Janaki RamanNo ratings yet
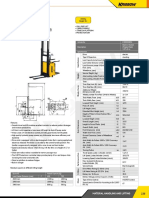
- Electric Stacker: Article No. KW0500894 Description Electric Stacker (Triplex Mast) 1.5T x3 M SpecificationDocument1 pageElectric Stacker: Article No. KW0500894 Description Electric Stacker (Triplex Mast) 1.5T x3 M SpecificationAsty RikyNo ratings yet
- Invoice: PT - Sitc IndonesiaDocument1 pageInvoice: PT - Sitc IndonesiaMuhammad SyukurNo ratings yet
- Panasonic LCD TH-L32C30Document72 pagesPanasonic LCD TH-L32C30King King0% (1)
- Itcc Comm. Center Bms Io PGDocument3 pagesItcc Comm. Center Bms Io PGuddinnadeemNo ratings yet
- The Migration Industry and Future Directions For Migration PolicyDocument4 pagesThe Migration Industry and Future Directions For Migration PolicyGabriella VillaçaNo ratings yet
- 3 PBDocument11 pages3 PBSuci DwiNo ratings yet
- NO Memo No. 21 S. 2018 Adherence To Training Policy PDFDocument10 pagesNO Memo No. 21 S. 2018 Adherence To Training Policy PDFKemberly Semaña PentonNo ratings yet
- Mock Trial Task CardsDocument8 pagesMock Trial Task CardsVitaliy Fedchenko0% (1)
- DKE344 BibDocument2 pagesDKE344 BibMohamad SleimanNo ratings yet