Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Chapter 1 Principles of Fiber Optics and CharacteristicsDocument49 pagesChapter 1 Principles of Fiber Optics and CharacteristicsKairredin Mahamed Husen0% (1)
- 0statically and Dynamically Induced EmfDocument18 pages0statically and Dynamically Induced EmfAleksandar Petrovic100% (1)
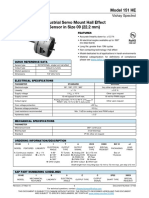
- Model 151 HE: Vishay SpectrolDocument5 pagesModel 151 HE: Vishay SpectrolnicamarcosNo ratings yet
- Impedance Matching 1 Lecture For July 2, 2013Document91 pagesImpedance Matching 1 Lecture For July 2, 2013Alas Mallari DonatoNo ratings yet
- Photogrammetry and Remote SensingDocument14 pagesPhotogrammetry and Remote SensingJoseph Dincht83% (6)
- Three Phase Symmetrical FaultDocument15 pagesThree Phase Symmetrical FaultSean Ben KadusaleNo ratings yet
- Table of Contents - "S - 350 - 399.doc"Document68 pagesTable of Contents - "S - 350 - 399.doc"runjoguz0No ratings yet
- Experiment No: 8 A) Familiarization With Construction and Working of A Transformer B) Verification of Turns Ratio of TransformerDocument3 pagesExperiment No: 8 A) Familiarization With Construction and Working of A Transformer B) Verification of Turns Ratio of TransformerSaad AliKhan0% (1)
- Nuclear Reaction and RadioactivityDocument12 pagesNuclear Reaction and RadioactivityHermae BuctonNo ratings yet
- BMW Starting SystemsDocument15 pagesBMW Starting Systemsgraig27No ratings yet
- Phase Contrast MicrosDocument7 pagesPhase Contrast Micros9791617898No ratings yet
- Polarity Test TransformerDocument7 pagesPolarity Test TransformerPINEDA CRISTIAN PAUL C.No ratings yet
- CBRadio November1981 PDFDocument80 pagesCBRadio November1981 PDFbobbyunlockNo ratings yet
- Assignment - 1 - Pu SystemsDocument3 pagesAssignment - 1 - Pu SystemsDeepak ThapaNo ratings yet
- Lighting Circuits PDFDocument24 pagesLighting Circuits PDFShadi AbdelsalamNo ratings yet
- Acoustic EnergyDocument3 pagesAcoustic EnergyHerjay Racho SulapasNo ratings yet
- Em-30-01-01-Mr-26 (KM Chan 17.11.2022)Document15 pagesEm-30-01-01-Mr-26 (KM Chan 17.11.2022)Scienscope SDN BHDNo ratings yet
- 047-Testing of Electrical Protection PDFDocument13 pages047-Testing of Electrical Protection PDFVikrant Deshmukh0% (1)
- PT4 Pressure Transmitters: Technical DataDocument4 pagesPT4 Pressure Transmitters: Technical DataMamdooh AbdallahNo ratings yet
- Integral Equations For Real Life Multiscale Electromagnetic Problems Electromagnetic Waves Francesca Vipiana Full ChapterDocument68 pagesIntegral Equations For Real Life Multiscale Electromagnetic Problems Electromagnetic Waves Francesca Vipiana Full Chaptermary.sticker617100% (7)
- SS 316 04Document12 pagesSS 316 04Muhammad Asif IqbalNo ratings yet
- Click Here To Join To Download Our App Follow Us On Facebook Follow Us On InstagramDocument12 pagesClick Here To Join To Download Our App Follow Us On Facebook Follow Us On InstagramshilNo ratings yet
- Pulse Ox Manual PDFDocument1 pagePulse Ox Manual PDFcarlos56dbNo ratings yet
- National Senior Certificate: Physical Sciences P1 (Physics) Half - Yearly Examinations JUNE 2020Document32 pagesNational Senior Certificate: Physical Sciences P1 (Physics) Half - Yearly Examinations JUNE 2020MfanafuthiNo ratings yet
- Electrical Thumb Rules You MUST Follow (Part 1) - EEPDocument6 pagesElectrical Thumb Rules You MUST Follow (Part 1) - EEPGiri BabuNo ratings yet
- Wave Optics 2023 New NotesDocument9 pagesWave Optics 2023 New NotesAman PrajapatiNo ratings yet
- Electrostatics 4 Question PaperDocument3 pagesElectrostatics 4 Question PaperdhanushbodybuilderNo ratings yet
- Edexcel Igcse Physics 4ph1 TheoryDocument21 pagesEdexcel Igcse Physics 4ph1 Theorysammam mahdi samiNo ratings yet
- Docter Sight English ManualDocument8 pagesDocter Sight English Manualkiki miki0% (1)
- 2008 HKCEE Physics P2 SolDocument24 pages2008 HKCEE Physics P2 SolAlex KongNo ratings yet