Download as pdf or txt
You might also like
- Ece 374 Part 7 Mosfet 2Document16 pagesEce 374 Part 7 Mosfet 2Zakaria ElwalilyNo ratings yet
- Experiment-04: ObjectiveDocument8 pagesExperiment-04: ObjectivePallaviNo ratings yet
- Harmonic DistortionsDocument23 pagesHarmonic Distortionssandeep kumar mishraNo ratings yet
- DC Motor Drives (AC-DC Controlled Rectifier)Document46 pagesDC Motor Drives (AC-DC Controlled Rectifier)Zafirah HanafiNo ratings yet
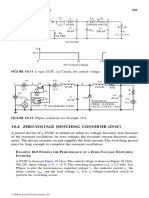
- Resonant-Pulse Inverters: 10.4 Zero-Voltage Switching Converter (ZVSC)Document1 pageResonant-Pulse Inverters: 10.4 Zero-Voltage Switching Converter (ZVSC)Mathurthi BrahmiNo ratings yet
- Electrical Machines: GATE - 2020/21Document89 pagesElectrical Machines: GATE - 2020/21Dse YtNo ratings yet
- SOLUTION FOR Matlab 1Document5 pagesSOLUTION FOR Matlab 1Robert DukerNo ratings yet
- Aec Lab ManualDocument33 pagesAec Lab Manualganga_ch1No ratings yet
- Series RLC Circuits Calculation For Electrical SystemDocument1 pageSeries RLC Circuits Calculation For Electrical SystemWilson (Electrical Engineer)No ratings yet
- Chapter V - Problem Set P5.1Document15 pagesChapter V - Problem Set P5.1Aaron MartinezNo ratings yet
- 實驗7-電晶體工作原理及特性 2023-04-09 12 - 52 - 14 -Document9 pages實驗7-電晶體工作原理及特性 2023-04-09 12 - 52 - 14 -AnonymityNo ratings yet
- Ece 374 Part 7 Mosfet 3Document14 pagesEce 374 Part 7 Mosfet 3Zakaria ElwalilyNo ratings yet
- Radio 1 Up Down ConversionDocument15 pagesRadio 1 Up Down Conversionayal gezeNo ratings yet
- Aurora Scientific and Techological Institute: (Student Version) 2008-2009Document30 pagesAurora Scientific and Techological Institute: (Student Version) 2008-2009Chand BashaNo ratings yet
- Module 3 - DC Motor Drives RectifierDocument21 pagesModule 3 - DC Motor Drives Rectifierahmad akmalNo ratings yet
- Webench Design Report: Electrical BOMDocument5 pagesWebench Design Report: Electrical BOMshreerangarbrNo ratings yet
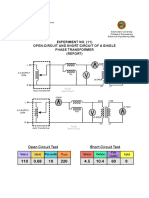
- Experiment No.11 - Machines LabDocument3 pagesExperiment No.11 - Machines LabSBNo ratings yet
- WBDesign 127Document10 pagesWBDesign 127sjoasgdNo ratings yet
- Experiment 4 Title: Basic Op-Amp Application Objectives: Vo R R V R R V .... EtcDocument3 pagesExperiment 4 Title: Basic Op-Amp Application Objectives: Vo R R V R R V .... EtcHasmizar Abd Halim (KTN)No ratings yet
- Module 3 - DC Motor Drives RectifierDocument21 pagesModule 3 - DC Motor Drives RectifiersyakirmustapaNo ratings yet
- EC6411 CircuitsSimulation LABDocument98 pagesEC6411 CircuitsSimulation LABJ.Gowri ShankarNo ratings yet
- Parallel RLC Circuits Calculation For Electrical SystemDocument1 pageParallel RLC Circuits Calculation For Electrical SystemWilson (Electrical Engineer)100% (1)
- Pulse Generator G M: ContinuousDocument5 pagesPulse Generator G M: ContinuousMoi MohemedNo ratings yet
- Reviewed 4. Power Electronics-12Document14 pagesReviewed 4. Power Electronics-12shivang agrawalNo ratings yet
- Analog Communication Lab ManualDocument59 pagesAnalog Communication Lab Manualsasa_sag100% (2)
- LITHIUM POLYMER BATTERYCHARGER BY MICROCONTROLLERFROM 50Hz 220V AC SUPPLYDocument31 pagesLITHIUM POLYMER BATTERYCHARGER BY MICROCONTROLLERFROM 50Hz 220V AC SUPPLYOzgur M. DumanNo ratings yet
- RC Circuit - 2019Document3 pagesRC Circuit - 2019thanhtoan2901No ratings yet
- Ac and DC Biasing-Bjts and Fet: Learning ObjectivesDocument24 pagesAc and DC Biasing-Bjts and Fet: Learning ObjectiveskalyanNo ratings yet
- Automatizari Complexe - Lucrarea 1: Three - Phase Asynchronous MachineDocument1 pageAutomatizari Complexe - Lucrarea 1: Three - Phase Asynchronous MachineAlexandru AichimoaieNo ratings yet
- DC ChoppersDocument38 pagesDC ChoppersBelayneh TadesseNo ratings yet
- WB Power SupplyDocument9 pagesWB Power SupplyRavindra SinghNo ratings yet
- Quartz Crystal Units: Oscillation CircuitsDocument3 pagesQuartz Crystal Units: Oscillation CircuitsRAVINDERNo ratings yet
- Exp13-Pass Transistor and Transmission Gate LogicDocument9 pagesExp13-Pass Transistor and Transmission Gate Logiciquabal_asifNo ratings yet
- Mathcad - HW2 ECE427 SolnDocument24 pagesMathcad - HW2 ECE427 SolnmtshNo ratings yet
- Macd Homework 3: D1 D1 D2 DCDocument4 pagesMacd Homework 3: D1 D1 D2 DCBerk_Omuz_1936No ratings yet
- WBDesign138 Startup-2Document10 pagesWBDesign138 Startup-2bruno magalhãesNo ratings yet
- WBDesign138 - Load Transient-3Document11 pagesWBDesign138 - Load Transient-3bruno magalhãesNo ratings yet
- Space Vector ModulationDocument40 pagesSpace Vector Modulationprasanna_btech06No ratings yet
- Preamp 2 BandasDocument11 pagesPreamp 2 Bandasavghvg123No ratings yet
- Solved Problems On DC To DCDocument6 pagesSolved Problems On DC To DCNihad DjebbarNo ratings yet
- WBDesign 42Document7 pagesWBDesign 42Hải TrầnNo ratings yet
- Circuit Construction Kit ACDocument1 pageCircuit Construction Kit ACKevin LuNo ratings yet
- Review Problems: 40 k Ω 4 kΩ Vo +Document16 pagesReview Problems: 40 k Ω 4 kΩ Vo +NajmoAdenNo ratings yet
- TransformersDocument75 pagesTransformerssamiularefin2000No ratings yet
- SMPS Half-Bridge 800W v1.0 - EsquemaDocument2 pagesSMPS Half-Bridge 800W v1.0 - EsquemaAdolf.J.Benit.100% (1)
- SMPS Half-Bridge 800W v1.0 - EsquemaDocument2 pagesSMPS Half-Bridge 800W v1.0 - EsquemaAdolf.J.Benit.0% (1)
- 3 3/4 Digit Multimeter: Users ManualDocument48 pages3 3/4 Digit Multimeter: Users ManualSANKARNo ratings yet
- p54PC0r.mQJunWmr9Y UsDocument169 pagesp54PC0r.mQJunWmr9Y UsftahNo ratings yet
- Digital Simulation of An Electrical Circuit (Including Dependent Sources) To Find Node Voltages and Branch Currents Using PspiceDocument2 pagesDigital Simulation of An Electrical Circuit (Including Dependent Sources) To Find Node Voltages and Branch Currents Using PspiceVikas BeemaNo ratings yet
- M67741H 150 175MHzDocument3 pagesM67741H 150 175MHzJuscelino Romão da RochaNo ratings yet
- Unit 3 PDFDocument45 pagesUnit 3 PDFYashika choudharyNo ratings yet
- Unit 3 PDFDocument45 pagesUnit 3 PDFGlenn Paul PaceteNo ratings yet
- Unit-3 - Function GeneratorDocument12 pagesUnit-3 - Function Generatorhavahe7853No ratings yet
- Ex3 LeadDocument14 pagesEx3 Leadpleiboikarti1210No ratings yet
- RF Amplifier DesignDocument12 pagesRF Amplifier DesignThiyagarajan KNo ratings yet
- Amplitude ModulationDocument10 pagesAmplitude ModulationlakshmiNo ratings yet
- CAD Lab Manual KEC 653B (4mail)Document38 pagesCAD Lab Manual KEC 653B (4mail)Piyush0% (1)
- Review Seluruh Materi Transformator: Teknik Elektro Universitas GunadarmaDocument46 pagesReview Seluruh Materi Transformator: Teknik Elektro Universitas GunadarmabayuindraNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- Differential EquationDocument27 pagesDifferential EquationRubina ArifNo ratings yet
- EMRAX 228 Technical Data Table (Dynamometer Test Data)Document3 pagesEMRAX 228 Technical Data Table (Dynamometer Test Data)amanggayamNo ratings yet
- Me F214 1084 C 2013 2Document3 pagesMe F214 1084 C 2013 2siddharth deshmukhNo ratings yet
- Numericals (Force)Document22 pagesNumericals (Force)Arsi TiwariNo ratings yet
- 150 Top Most Electrostatic - Electrical Engineering Multiple Choice Questions and AnswersDocument24 pages150 Top Most Electrostatic - Electrical Engineering Multiple Choice Questions and AnswersVijay Yadav BahoodurNo ratings yet
- W. G. v. Rosser - Classical Electromagnetism Via Relativity - BackmatterDocument85 pagesW. G. v. Rosser - Classical Electromagnetism Via Relativity - BackmattershivnairNo ratings yet
- 3RD Quarter Examination-6Document34 pages3RD Quarter Examination-6Louie De PedroNo ratings yet
- 3.4 CMOS Process Enhancements: 3.4.3.3 InductorsDocument1 page3.4 CMOS Process Enhancements: 3.4.3.3 InductorsCarlos SaavedraNo ratings yet
- Chapter 4 08 PDFDocument11 pagesChapter 4 08 PDFShoshAlmazroeuiNo ratings yet
- Wind Powerplant and Powerplant EconomicsDocument70 pagesWind Powerplant and Powerplant EconomicsVincentNo ratings yet
- GRE Practice Test 02 PDFDocument24 pagesGRE Practice Test 02 PDFÖzgün Alkın ŞensoyNo ratings yet
- CHE S204 Chapter 9 Unsteady State Heat Transfer G1Document11 pagesCHE S204 Chapter 9 Unsteady State Heat Transfer G1Fawziyyah AgboolaNo ratings yet
- Kloppers and KR Ger-2004 20 600 Dpi - 2004 20 1 24-29 PDFDocument6 pagesKloppers and KR Ger-2004 20 600 Dpi - 2004 20 1 24-29 PDFFernandoNo ratings yet
- Rectilinear Kinematics Erratic Motion PDFDocument28 pagesRectilinear Kinematics Erratic Motion PDFJubillee MagsinoNo ratings yet
- Fluid Mechanics For Engineers 1st Edition by Chin ISBN Solution ManualDocument56 pagesFluid Mechanics For Engineers 1st Edition by Chin ISBN Solution Manualsteve100% (34)
- HSC Physics Space WorkbookDocument32 pagesHSC Physics Space Workbookphil megroin100% (1)
- Supplemental Problems PDFDocument64 pagesSupplemental Problems PDFJopau Dela Cruz100% (1)
- Da RK: Simplified Aerodynamic Heating of RocketsDocument18 pagesDa RK: Simplified Aerodynamic Heating of RocketsMarcelo MartinezNo ratings yet
- 110 TOP MOST Measurement and Instrumentation - Electrical Engineering Objective Type Questions and Answers Electrical Engineering Multiple Choice Questions PDFDocument34 pages110 TOP MOST Measurement and Instrumentation - Electrical Engineering Objective Type Questions and Answers Electrical Engineering Multiple Choice Questions PDFSIVAKAMI80% (5)
- Relief Valve Tutorial Spirax SarcoDocument16 pagesRelief Valve Tutorial Spirax SarcoamokhtaNo ratings yet
- p2145s19 Test2Document4 pagesp2145s19 Test2FlooriNo ratings yet
- Pressure Conversion TablesDocument82 pagesPressure Conversion TablesGoutam Anbunathan100% (1)
- Subject: Physics Grade: 10-SCIENCE, 10-TVET Week: Topic: TimeDocument2 pagesSubject: Physics Grade: 10-SCIENCE, 10-TVET Week: Topic: Timeian josephNo ratings yet
- Power Factor CalculationsDocument3 pagesPower Factor CalculationsM Kumar MarimuthuNo ratings yet
- Applied Physics - Unit - 5Document31 pagesApplied Physics - Unit - 5Koppula veerendra nadhNo ratings yet
- Chapter Ten Lecture Ten Thermodynamics: TemperatureDocument16 pagesChapter Ten Lecture Ten Thermodynamics: TemperatureTony AtefNo ratings yet
- Given: (2) Find: (3) Formula: (4) Solution: (5) Final AnswerDocument5 pagesGiven: (2) Find: (3) Formula: (4) Solution: (5) Final AnswerEmpz CasesNo ratings yet
- Experimental Investigation On The Behaviour of IGBT at Short Circuit During On StateDocument6 pagesExperimental Investigation On The Behaviour of IGBT at Short Circuit During On StatedhruvNo ratings yet
- June 2021 (v2) QP - Paper 2 CIE Physics IGCSEDocument16 pagesJune 2021 (v2) QP - Paper 2 CIE Physics IGCSEMonoNo ratings yet
- Undamped Free Vibration - RahulDocument47 pagesUndamped Free Vibration - Rahulrs100788No ratings yet