
Troup Mechanics
Troup Mechanics
You might also like
- Applied Mathematics For Engineers and Physicists Mathematics SeriesDocument1 pageApplied Mathematics For Engineers and Physicists Mathematics SeriesprivateNo ratings yet
- Problems On Canonical TransformationsDocument3 pagesProblems On Canonical TransformationsMd. Nazmun Sadat KhanNo ratings yet
- Ultralocal Quantum Field Theory in Terms of Currents: I. The Free Theory Charles M. NewmanDocument36 pagesUltralocal Quantum Field Theory in Terms of Currents: I. The Free Theory Charles M. NewmanAritra BanerjeeNo ratings yet
- PJM v52 n2 p26 SDocument21 pagesPJM v52 n2 p26 Sajitkumar1No ratings yet
- Bosonic String TheoryDocument50 pagesBosonic String Theorysumairah1906No ratings yet
- Semiclassical Approximation: 3.1 The Classical LimitDocument22 pagesSemiclassical Approximation: 3.1 The Classical LimitRohan MittalNo ratings yet
- Suppl MaterialsDocument12 pagesSuppl MaterialsrichardNo ratings yet
- 1 Position and Momentum Commutation RelationsDocument6 pages1 Position and Momentum Commutation RelationsHalloMannNo ratings yet
- 11of15 - Appendix B - Gaussian Markov ProcessesDocument14 pages11of15 - Appendix B - Gaussian Markov ProcessesBranko NikolicNo ratings yet
- Renormalization Group and The Ginzburg-Landau Equation: Mathematical PhysicsDocument16 pagesRenormalization Group and The Ginzburg-Landau Equation: Mathematical PhysicsNikos PapanikolaouNo ratings yet
- ConnesMSZ Conformal Trace TH For Julia Sets PublishedDocument26 pagesConnesMSZ Conformal Trace TH For Julia Sets PublishedHuong Cam ThuyNo ratings yet
- Introduction To EntanglementDocument10 pagesIntroduction To EntanglementmaareaNo ratings yet
- Lectures 1 and 2Document5 pagesLectures 1 and 2Mario CacasennoNo ratings yet
- Introduction To Hypoelliptic SCHR Odinger Type Operators: Martin HairerDocument34 pagesIntroduction To Hypoelliptic SCHR Odinger Type Operators: Martin HairerhmducvnNo ratings yet
- JKMS 41 2 319 344Document27 pagesJKMS 41 2 319 344Kandel YandarNo ratings yet
- Lecture 1: Perturbative Renormalization: X V V V ' V X ' VDocument15 pagesLecture 1: Perturbative Renormalization: X V V V ' V X ' VluisdanielNo ratings yet
- Quantum Geometry of Bosonic Strings: L.D. Landau Institute For Theoretical Physics, Moscow, USSRDocument4 pagesQuantum Geometry of Bosonic Strings: L.D. Landau Institute For Theoretical Physics, Moscow, USSRAvinash RejiNo ratings yet
- M.A. Dariescu Et Al - Thermodynamics of Bosons in An Universe With Global PathologyDocument10 pagesM.A. Dariescu Et Al - Thermodynamics of Bosons in An Universe With Global PathologyAzmerzrNo ratings yet
- Scattering Matrix in Conformal Geometry: The Erwin SCHR Odinger International Institute For Mathematical PhysicsDocument29 pagesScattering Matrix in Conformal Geometry: The Erwin SCHR Odinger International Institute For Mathematical PhysicsJose RamirezNo ratings yet
- Exercise 1 2022Document3 pagesExercise 1 2022Shivang MathurNo ratings yet
- A Natural Topology For Upper Semicontinuous Functions and A Baire Category Dual For Convergence in MeasureDocument17 pagesA Natural Topology For Upper Semicontinuous Functions and A Baire Category Dual For Convergence in MeasureKarima AitNo ratings yet
- A Relativistic Statistical Field Theory On A Discretized Minkowski Lattice With Quantum-Like ObservablesDocument21 pagesA Relativistic Statistical Field Theory On A Discretized Minkowski Lattice With Quantum-Like ObservablesBNo ratings yet
- Toeplitz Extensions in Noncommutative Topology and PDFDocument27 pagesToeplitz Extensions in Noncommutative Topology and PDFZRichard61No ratings yet
- 2017 HW1Document4 pages2017 HW1OmegaNo ratings yet
- Reproducing Kernels and Operators With A Cyclic Vector I: e E), First Considered by LivsicDocument18 pagesReproducing Kernels and Operators With A Cyclic Vector I: e E), First Considered by LivsicjNo ratings yet
- Geometria Del Semiplano de Poincare de Un AlgebraDocument31 pagesGeometria Del Semiplano de Poincare de Un AlgebraGustavo CorachNo ratings yet
- SynopsisDocument13 pagesSynopsisAaqid BhatNo ratings yet
- bf01398934 1Document24 pagesbf01398934 1satvik.geniusNo ratings yet
- Perfect Fluid Cosmology With Geodesic World Lines: Review D Number NovemberDocument3 pagesPerfect Fluid Cosmology With Geodesic World Lines: Review D Number NovemberKaustubhNo ratings yet
- Pacific Journal of Mathematics: Reproducing Kernels and Operators With A Cyclic Vector. IDocument21 pagesPacific Journal of Mathematics: Reproducing Kernels and Operators With A Cyclic Vector. IKate Sai kishoreNo ratings yet
- Al DSDocument15 pagesAl DSehud de shalitNo ratings yet
- 10.1515 - Zna 1989 0905Document10 pages10.1515 - Zna 1989 0905jandersen6169No ratings yet
- Zuk-Nuclear Physics B 280 1987Document22 pagesZuk-Nuclear Physics B 280 1987Tin ZNo ratings yet
- Universality of L-Functions J. SteudingDocument12 pagesUniversality of L-Functions J. SteudingliquidpoetessNo ratings yet
- Intersection Theory NotesDocument68 pagesIntersection Theory NotesChor Yin HoNo ratings yet
- Green FunctionDocument4 pagesGreen FunctionŠejla HadžićNo ratings yet
- Seco-Patrao-2022-COUNTING GEODESICS ON COMPACT SYMMETRIC SPACES PDFDocument24 pagesSeco-Patrao-2022-COUNTING GEODESICS ON COMPACT SYMMETRIC SPACES PDFlucassecoNo ratings yet
- Ps 9Document3 pagesPs 9Muskan BuraNo ratings yet
- Pub 06Document21 pagesPub 06παπαδοπουλοςNo ratings yet
- Meshless and Generalized Finite Element Methods: A Survey of Some Major ResultsDocument20 pagesMeshless and Generalized Finite Element Methods: A Survey of Some Major ResultsJorge Luis Garcia ZuñigaNo ratings yet
- More About The Stone-Weierstrass Theorem Than You Probably Want To KnowDocument14 pagesMore About The Stone-Weierstrass Theorem Than You Probably Want To KnowAloyana Couto da SilvaNo ratings yet
- sm192 1 03Document9 pagessm192 1 03FaidherRodriguezNo ratings yet
- Qualifying Exams Fall Fall 22 Wo SolutionsDocument6 pagesQualifying Exams Fall Fall 22 Wo SolutionsbassemaeNo ratings yet
- Composite Quantum WellsDocument7 pagesComposite Quantum WellsRafael BautistaNo ratings yet
- Little SchottkyProblem PDFDocument9 pagesLittle SchottkyProblem PDFhelmantico1970No ratings yet
- Analytic FBM RoughDocument27 pagesAnalytic FBM Roughanahh ramakNo ratings yet
- AbstractDocument19 pagesAbstractlancejoe2020No ratings yet
- A.S. Okb EI - Bab and A.M. Zabel HARMONIC ANALYSIS ON LINEARDocument8 pagesA.S. Okb EI - Bab and A.M. Zabel HARMONIC ANALYSIS ON LINEARManar MaherNo ratings yet
- Adams, Atiyah - K-Theory and The Hopf Invariant PDFDocument8 pagesAdams, Atiyah - K-Theory and The Hopf Invariant PDFab1699No ratings yet
- General Relativistic Quantum MechanicsDocument5 pagesGeneral Relativistic Quantum MechanicsFarhad HossainNo ratings yet
- Resurgence in Geometry and Physics: Brent Pym Trinity Term 2016Document11 pagesResurgence in Geometry and Physics: Brent Pym Trinity Term 2016mqtrinhNo ratings yet
- qft1 - h1 200829 120306Document3 pagesqft1 - h1 200829 120306JUAN PABLO HOYOS DAZANo ratings yet
- Canonical Quantization C6, HT 2016: 1.1 From Classical To Quantum TheoryDocument19 pagesCanonical Quantization C6, HT 2016: 1.1 From Classical To Quantum Theorycifarha venantNo ratings yet
- Perkalian 2Document13 pagesPerkalian 2viviNo ratings yet
- Winitzki - Heidelberg Lectures On Advanced General Relativity 2007Document156 pagesWinitzki - Heidelberg Lectures On Advanced General Relativity 2007winitzkiNo ratings yet
- Density Functionals For Couiomb Systems: Departments New Jersey 08544, U.S.ADocument35 pagesDensity Functionals For Couiomb Systems: Departments New Jersey 08544, U.S.ARamon FerreiraNo ratings yet
- Holonomy, The Quantum Adiabatic Theorem, and Berry's PhaseDocument4 pagesHolonomy, The Quantum Adiabatic Theorem, and Berry's Phase温酒No ratings yet
- Acta Applicandae Mathematicae Volume 36 Issue 1-2 1994 (Doi 10.1007 - bf01001546) A. O. Smirnov - Finite-Gap Elliptic Solutions of The KDV EquationDocument42 pagesActa Applicandae Mathematicae Volume 36 Issue 1-2 1994 (Doi 10.1007 - bf01001546) A. O. Smirnov - Finite-Gap Elliptic Solutions of The KDV EquationArmando Treibich KohnNo ratings yet
- MIT8 04S16 ps3 2016Document4 pagesMIT8 04S16 ps3 2016Fabian M Vargas FontalvoNo ratings yet
- Convexity and Differentiable Functions: R R R R R R R R R R R R R R R RDocument5 pagesConvexity and Differentiable Functions: R R R R R R R R R R R R R R R RhoalongkiemNo ratings yet
- 1981-Kashiwara-Miwa-The Tau Func. of KP-Transformation Groups For Soliton Eq. I-Proc - Jpn.AcadDocument6 pages1981-Kashiwara-Miwa-The Tau Func. of KP-Transformation Groups For Soliton Eq. I-Proc - Jpn.Acadmm.mm.mabcmNo ratings yet
- (I. Ciufolini, V. Gorini, U. Moschella, P Fre) Gra PDFDocument422 pages(I. Ciufolini, V. Gorini, U. Moschella, P Fre) Gra PDFprivateNo ratings yet
- I CM Article Mihal IsDocument27 pagesI CM Article Mihal IsprivateNo ratings yet
- Euler HomogeneityDocument4 pagesEuler HomogeneityprivateNo ratings yet
- Infinite Dimension 2Document8 pagesInfinite Dimension 2privateNo ratings yet
- Infinite Dimension 2Document8 pagesInfinite Dimension 2privateNo ratings yet
- Continuum TalkDocument8 pagesContinuum TalkprivateNo ratings yet
- Falkovich Statistical - Physics NotesDocument165 pagesFalkovich Statistical - Physics NotestulinneNo ratings yet
- Dirac Equation From The Hamiltonian and The Case With A Gravitational FieldDocument26 pagesDirac Equation From The Hamiltonian and The Case With A Gravitational FieldJohn BirdNo ratings yet
- HW08 PDFDocument1 pageHW08 PDFShweta SridharNo ratings yet
- Diff ManDocument75 pagesDiff Mank_gh22No ratings yet
- Problem Set VI Lagrangian DynamicsDocument4 pagesProblem Set VI Lagrangian DynamicsDiego ForeroNo ratings yet
- 2005 by Joel A. ShapiroDocument14 pages2005 by Joel A. ShapiroGerman ChiappeNo ratings yet
- Wigner Functions For The Landau Problem in Noncommutative SpacesDocument10 pagesWigner Functions For The Landau Problem in Noncommutative Spacesivan kikungaNo ratings yet
- Energy Shaping Inertia Wheel PendulumDocument6 pagesEnergy Shaping Inertia Wheel PendulumSalomón CastañoNo ratings yet
- Classical Mechanics Arya 2nd EdDocument719 pagesClassical Mechanics Arya 2nd EdMaria Heloísa100% (1)
- Classical Mechanics ProblemsDocument40 pagesClassical Mechanics ProblemsJeff Secrest100% (1)
- Problem Sheet 8Document7 pagesProblem Sheet 8AliOucharNo ratings yet
- The Lagrangian/Hamiltonian/Symplectic Approach To Mathematical Physics.Document19 pagesThe Lagrangian/Hamiltonian/Symplectic Approach To Mathematical Physics.Rock BrentwoodNo ratings yet
- The Thermodynamics of An Isolated ParticleDocument104 pagesThe Thermodynamics of An Isolated ParticleJosé Luis Gómez RamírezNo ratings yet
- Operators: Mathematical & Physical Concepts in Quantum MechanicsDocument19 pagesOperators: Mathematical & Physical Concepts in Quantum Mechanicsمؤيد العليNo ratings yet
- Lecture 39Document15 pagesLecture 39thrw3411No ratings yet
- Unit 5: Hamiltonian DynamicsDocument10 pagesUnit 5: Hamiltonian DynamicsNithin GigiNo ratings yet
- Classical and Quantum Mechanics of The Damped Harmonic Oscillator (Physrep80 (1981) 1)Document110 pagesClassical and Quantum Mechanics of The Damped Harmonic Oscillator (Physrep80 (1981) 1)Luis ArroyoNo ratings yet
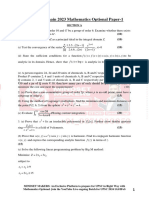
- UPSC CSE Main 2023 Mathematics Optional PaperDocument5 pagesUPSC CSE Main 2023 Mathematics Optional PapersukutraoNo ratings yet
- Advanced Classical Physics, Autumn 2016: Professor Carlo R. Contaldi October 7, 2016Document17 pagesAdvanced Classical Physics, Autumn 2016: Professor Carlo R. Contaldi October 7, 2016Ryan TraversNo ratings yet
- Questoes Resolvidas GoldstainDocument9 pagesQuestoes Resolvidas GoldstainAlisson MororóNo ratings yet
- Applied Mathematics and Computation: Solomon Manukure, Wen-Xiu MaDocument9 pagesApplied Mathematics and Computation: Solomon Manukure, Wen-Xiu MaAnonymous BFlqdMFKLNo ratings yet
- RmlauDocument31 pagesRmlauAbhinandanNo ratings yet
- MecanicaClassica PG Aula13 MBGDDocument28 pagesMecanicaClassica PG Aula13 MBGDLeonardo Camargo RossatoNo ratings yet
- Lectures On Classical Mechanics-John Baez PDFDocument76 pagesLectures On Classical Mechanics-John Baez PDFlakshmeeshaNo ratings yet
- Geometrization of Quantum Mechanics - KibbleDocument7 pagesGeometrization of Quantum Mechanics - KibbleWendy BaldwinNo ratings yet
- QFT Irfu13Document70 pagesQFT Irfu13cifarha venantNo ratings yet
- Mechanics Problem Set - 16Document1 pageMechanics Problem Set - 16Perry EsguerraNo ratings yet
- 7 EFv NPBL RS9 BV 6 J 37 Ux LTZgiqa R6 E6 R 1 C Osu TRC XDocument18 pages7 EFv NPBL RS9 BV 6 J 37 Ux LTZgiqa R6 E6 R 1 C Osu TRC XAbhishekNo ratings yet
- YounDocument19 pagesYounRamesh IswaraNo ratings yet































































































Download as pdf or txt
You might also like
- Applied Mathematics For Engineers and Physicists Mathematics SeriesDocument1 pageApplied Mathematics For Engineers and Physicists Mathematics SeriesprivateNo ratings yet
- Problems On Canonical TransformationsDocument3 pagesProblems On Canonical TransformationsMd. Nazmun Sadat KhanNo ratings yet
- Ultralocal Quantum Field Theory in Terms of Currents: I. The Free Theory Charles M. NewmanDocument36 pagesUltralocal Quantum Field Theory in Terms of Currents: I. The Free Theory Charles M. NewmanAritra BanerjeeNo ratings yet
- PJM v52 n2 p26 SDocument21 pagesPJM v52 n2 p26 Sajitkumar1No ratings yet
- Bosonic String TheoryDocument50 pagesBosonic String Theorysumairah1906No ratings yet
- Semiclassical Approximation: 3.1 The Classical LimitDocument22 pagesSemiclassical Approximation: 3.1 The Classical LimitRohan MittalNo ratings yet
- Suppl MaterialsDocument12 pagesSuppl MaterialsrichardNo ratings yet
- 1 Position and Momentum Commutation RelationsDocument6 pages1 Position and Momentum Commutation RelationsHalloMannNo ratings yet
- 11of15 - Appendix B - Gaussian Markov ProcessesDocument14 pages11of15 - Appendix B - Gaussian Markov ProcessesBranko NikolicNo ratings yet
- Renormalization Group and The Ginzburg-Landau Equation: Mathematical PhysicsDocument16 pagesRenormalization Group and The Ginzburg-Landau Equation: Mathematical PhysicsNikos PapanikolaouNo ratings yet
- ConnesMSZ Conformal Trace TH For Julia Sets PublishedDocument26 pagesConnesMSZ Conformal Trace TH For Julia Sets PublishedHuong Cam ThuyNo ratings yet
- Introduction To EntanglementDocument10 pagesIntroduction To EntanglementmaareaNo ratings yet
- Lectures 1 and 2Document5 pagesLectures 1 and 2Mario CacasennoNo ratings yet
- Introduction To Hypoelliptic SCHR Odinger Type Operators: Martin HairerDocument34 pagesIntroduction To Hypoelliptic SCHR Odinger Type Operators: Martin HairerhmducvnNo ratings yet
- JKMS 41 2 319 344Document27 pagesJKMS 41 2 319 344Kandel YandarNo ratings yet
- Lecture 1: Perturbative Renormalization: X V V V ' V X ' VDocument15 pagesLecture 1: Perturbative Renormalization: X V V V ' V X ' VluisdanielNo ratings yet
- Quantum Geometry of Bosonic Strings: L.D. Landau Institute For Theoretical Physics, Moscow, USSRDocument4 pagesQuantum Geometry of Bosonic Strings: L.D. Landau Institute For Theoretical Physics, Moscow, USSRAvinash RejiNo ratings yet
- M.A. Dariescu Et Al - Thermodynamics of Bosons in An Universe With Global PathologyDocument10 pagesM.A. Dariescu Et Al - Thermodynamics of Bosons in An Universe With Global PathologyAzmerzrNo ratings yet
- Scattering Matrix in Conformal Geometry: The Erwin SCHR Odinger International Institute For Mathematical PhysicsDocument29 pagesScattering Matrix in Conformal Geometry: The Erwin SCHR Odinger International Institute For Mathematical PhysicsJose RamirezNo ratings yet
- Exercise 1 2022Document3 pagesExercise 1 2022Shivang MathurNo ratings yet
- A Natural Topology For Upper Semicontinuous Functions and A Baire Category Dual For Convergence in MeasureDocument17 pagesA Natural Topology For Upper Semicontinuous Functions and A Baire Category Dual For Convergence in MeasureKarima AitNo ratings yet
- A Relativistic Statistical Field Theory On A Discretized Minkowski Lattice With Quantum-Like ObservablesDocument21 pagesA Relativistic Statistical Field Theory On A Discretized Minkowski Lattice With Quantum-Like ObservablesBNo ratings yet
- Toeplitz Extensions in Noncommutative Topology and PDFDocument27 pagesToeplitz Extensions in Noncommutative Topology and PDFZRichard61No ratings yet
- 2017 HW1Document4 pages2017 HW1OmegaNo ratings yet
- Reproducing Kernels and Operators With A Cyclic Vector I: e E), First Considered by LivsicDocument18 pagesReproducing Kernels and Operators With A Cyclic Vector I: e E), First Considered by LivsicjNo ratings yet
- Geometria Del Semiplano de Poincare de Un AlgebraDocument31 pagesGeometria Del Semiplano de Poincare de Un AlgebraGustavo CorachNo ratings yet
- SynopsisDocument13 pagesSynopsisAaqid BhatNo ratings yet
- bf01398934 1Document24 pagesbf01398934 1satvik.geniusNo ratings yet
- Perfect Fluid Cosmology With Geodesic World Lines: Review D Number NovemberDocument3 pagesPerfect Fluid Cosmology With Geodesic World Lines: Review D Number NovemberKaustubhNo ratings yet
- Pacific Journal of Mathematics: Reproducing Kernels and Operators With A Cyclic Vector. IDocument21 pagesPacific Journal of Mathematics: Reproducing Kernels and Operators With A Cyclic Vector. IKate Sai kishoreNo ratings yet
- Al DSDocument15 pagesAl DSehud de shalitNo ratings yet
- 10.1515 - Zna 1989 0905Document10 pages10.1515 - Zna 1989 0905jandersen6169No ratings yet
- Zuk-Nuclear Physics B 280 1987Document22 pagesZuk-Nuclear Physics B 280 1987Tin ZNo ratings yet
- Universality of L-Functions J. SteudingDocument12 pagesUniversality of L-Functions J. SteudingliquidpoetessNo ratings yet
- Intersection Theory NotesDocument68 pagesIntersection Theory NotesChor Yin HoNo ratings yet
- Green FunctionDocument4 pagesGreen FunctionŠejla HadžićNo ratings yet
- Seco-Patrao-2022-COUNTING GEODESICS ON COMPACT SYMMETRIC SPACES PDFDocument24 pagesSeco-Patrao-2022-COUNTING GEODESICS ON COMPACT SYMMETRIC SPACES PDFlucassecoNo ratings yet
- Ps 9Document3 pagesPs 9Muskan BuraNo ratings yet
- Pub 06Document21 pagesPub 06παπαδοπουλοςNo ratings yet
- Meshless and Generalized Finite Element Methods: A Survey of Some Major ResultsDocument20 pagesMeshless and Generalized Finite Element Methods: A Survey of Some Major ResultsJorge Luis Garcia ZuñigaNo ratings yet
- More About The Stone-Weierstrass Theorem Than You Probably Want To KnowDocument14 pagesMore About The Stone-Weierstrass Theorem Than You Probably Want To KnowAloyana Couto da SilvaNo ratings yet
- sm192 1 03Document9 pagessm192 1 03FaidherRodriguezNo ratings yet
- Qualifying Exams Fall Fall 22 Wo SolutionsDocument6 pagesQualifying Exams Fall Fall 22 Wo SolutionsbassemaeNo ratings yet
- Composite Quantum WellsDocument7 pagesComposite Quantum WellsRafael BautistaNo ratings yet
- Little SchottkyProblem PDFDocument9 pagesLittle SchottkyProblem PDFhelmantico1970No ratings yet
- Analytic FBM RoughDocument27 pagesAnalytic FBM Roughanahh ramakNo ratings yet
- AbstractDocument19 pagesAbstractlancejoe2020No ratings yet
- A.S. Okb EI - Bab and A.M. Zabel HARMONIC ANALYSIS ON LINEARDocument8 pagesA.S. Okb EI - Bab and A.M. Zabel HARMONIC ANALYSIS ON LINEARManar MaherNo ratings yet
- Adams, Atiyah - K-Theory and The Hopf Invariant PDFDocument8 pagesAdams, Atiyah - K-Theory and The Hopf Invariant PDFab1699No ratings yet
- General Relativistic Quantum MechanicsDocument5 pagesGeneral Relativistic Quantum MechanicsFarhad HossainNo ratings yet
- Resurgence in Geometry and Physics: Brent Pym Trinity Term 2016Document11 pagesResurgence in Geometry and Physics: Brent Pym Trinity Term 2016mqtrinhNo ratings yet
- qft1 - h1 200829 120306Document3 pagesqft1 - h1 200829 120306JUAN PABLO HOYOS DAZANo ratings yet
- Canonical Quantization C6, HT 2016: 1.1 From Classical To Quantum TheoryDocument19 pagesCanonical Quantization C6, HT 2016: 1.1 From Classical To Quantum Theorycifarha venantNo ratings yet
- Perkalian 2Document13 pagesPerkalian 2viviNo ratings yet
- Winitzki - Heidelberg Lectures On Advanced General Relativity 2007Document156 pagesWinitzki - Heidelberg Lectures On Advanced General Relativity 2007winitzkiNo ratings yet
- Density Functionals For Couiomb Systems: Departments New Jersey 08544, U.S.ADocument35 pagesDensity Functionals For Couiomb Systems: Departments New Jersey 08544, U.S.ARamon FerreiraNo ratings yet
- Holonomy, The Quantum Adiabatic Theorem, and Berry's PhaseDocument4 pagesHolonomy, The Quantum Adiabatic Theorem, and Berry's Phase温酒No ratings yet
- Acta Applicandae Mathematicae Volume 36 Issue 1-2 1994 (Doi 10.1007 - bf01001546) A. O. Smirnov - Finite-Gap Elliptic Solutions of The KDV EquationDocument42 pagesActa Applicandae Mathematicae Volume 36 Issue 1-2 1994 (Doi 10.1007 - bf01001546) A. O. Smirnov - Finite-Gap Elliptic Solutions of The KDV EquationArmando Treibich KohnNo ratings yet
- MIT8 04S16 ps3 2016Document4 pagesMIT8 04S16 ps3 2016Fabian M Vargas FontalvoNo ratings yet
- Convexity and Differentiable Functions: R R R R R R R R R R R R R R R RDocument5 pagesConvexity and Differentiable Functions: R R R R R R R R R R R R R R R RhoalongkiemNo ratings yet
- 1981-Kashiwara-Miwa-The Tau Func. of KP-Transformation Groups For Soliton Eq. I-Proc - Jpn.AcadDocument6 pages1981-Kashiwara-Miwa-The Tau Func. of KP-Transformation Groups For Soliton Eq. I-Proc - Jpn.Acadmm.mm.mabcmNo ratings yet
- (I. Ciufolini, V. Gorini, U. Moschella, P Fre) Gra PDFDocument422 pages(I. Ciufolini, V. Gorini, U. Moschella, P Fre) Gra PDFprivateNo ratings yet
- I CM Article Mihal IsDocument27 pagesI CM Article Mihal IsprivateNo ratings yet
- Euler HomogeneityDocument4 pagesEuler HomogeneityprivateNo ratings yet
- Infinite Dimension 2Document8 pagesInfinite Dimension 2privateNo ratings yet
- Infinite Dimension 2Document8 pagesInfinite Dimension 2privateNo ratings yet
- Continuum TalkDocument8 pagesContinuum TalkprivateNo ratings yet
- Falkovich Statistical - Physics NotesDocument165 pagesFalkovich Statistical - Physics NotestulinneNo ratings yet
- Dirac Equation From The Hamiltonian and The Case With A Gravitational FieldDocument26 pagesDirac Equation From The Hamiltonian and The Case With A Gravitational FieldJohn BirdNo ratings yet
- HW08 PDFDocument1 pageHW08 PDFShweta SridharNo ratings yet
- Diff ManDocument75 pagesDiff Mank_gh22No ratings yet
- Problem Set VI Lagrangian DynamicsDocument4 pagesProblem Set VI Lagrangian DynamicsDiego ForeroNo ratings yet
- 2005 by Joel A. ShapiroDocument14 pages2005 by Joel A. ShapiroGerman ChiappeNo ratings yet
- Wigner Functions For The Landau Problem in Noncommutative SpacesDocument10 pagesWigner Functions For The Landau Problem in Noncommutative Spacesivan kikungaNo ratings yet
- Energy Shaping Inertia Wheel PendulumDocument6 pagesEnergy Shaping Inertia Wheel PendulumSalomón CastañoNo ratings yet
- Classical Mechanics Arya 2nd EdDocument719 pagesClassical Mechanics Arya 2nd EdMaria Heloísa100% (1)
- Classical Mechanics ProblemsDocument40 pagesClassical Mechanics ProblemsJeff Secrest100% (1)
- Problem Sheet 8Document7 pagesProblem Sheet 8AliOucharNo ratings yet
- The Lagrangian/Hamiltonian/Symplectic Approach To Mathematical Physics.Document19 pagesThe Lagrangian/Hamiltonian/Symplectic Approach To Mathematical Physics.Rock BrentwoodNo ratings yet
- The Thermodynamics of An Isolated ParticleDocument104 pagesThe Thermodynamics of An Isolated ParticleJosé Luis Gómez RamírezNo ratings yet
- Operators: Mathematical & Physical Concepts in Quantum MechanicsDocument19 pagesOperators: Mathematical & Physical Concepts in Quantum Mechanicsمؤيد العليNo ratings yet
- Lecture 39Document15 pagesLecture 39thrw3411No ratings yet
- Unit 5: Hamiltonian DynamicsDocument10 pagesUnit 5: Hamiltonian DynamicsNithin GigiNo ratings yet
- Classical and Quantum Mechanics of The Damped Harmonic Oscillator (Physrep80 (1981) 1)Document110 pagesClassical and Quantum Mechanics of The Damped Harmonic Oscillator (Physrep80 (1981) 1)Luis ArroyoNo ratings yet
- UPSC CSE Main 2023 Mathematics Optional PaperDocument5 pagesUPSC CSE Main 2023 Mathematics Optional PapersukutraoNo ratings yet
- Advanced Classical Physics, Autumn 2016: Professor Carlo R. Contaldi October 7, 2016Document17 pagesAdvanced Classical Physics, Autumn 2016: Professor Carlo R. Contaldi October 7, 2016Ryan TraversNo ratings yet
- Questoes Resolvidas GoldstainDocument9 pagesQuestoes Resolvidas GoldstainAlisson MororóNo ratings yet
- Applied Mathematics and Computation: Solomon Manukure, Wen-Xiu MaDocument9 pagesApplied Mathematics and Computation: Solomon Manukure, Wen-Xiu MaAnonymous BFlqdMFKLNo ratings yet
- RmlauDocument31 pagesRmlauAbhinandanNo ratings yet
- MecanicaClassica PG Aula13 MBGDDocument28 pagesMecanicaClassica PG Aula13 MBGDLeonardo Camargo RossatoNo ratings yet
- Lectures On Classical Mechanics-John Baez PDFDocument76 pagesLectures On Classical Mechanics-John Baez PDFlakshmeeshaNo ratings yet
- Geometrization of Quantum Mechanics - KibbleDocument7 pagesGeometrization of Quantum Mechanics - KibbleWendy BaldwinNo ratings yet
- QFT Irfu13Document70 pagesQFT Irfu13cifarha venantNo ratings yet
- Mechanics Problem Set - 16Document1 pageMechanics Problem Set - 16Perry EsguerraNo ratings yet
- 7 EFv NPBL RS9 BV 6 J 37 Ux LTZgiqa R6 E6 R 1 C Osu TRC XDocument18 pages7 EFv NPBL RS9 BV 6 J 37 Ux LTZgiqa R6 E6 R 1 C Osu TRC XAbhishekNo ratings yet
- YounDocument19 pagesYounRamesh IswaraNo ratings yet