Download as pdf or txt
You might also like
- Math 8 SOL Review: Section One: Number SenseDocument9 pagesMath 8 SOL Review: Section One: Number SenseGianinne LozadaNo ratings yet
- Problems HatcherDocument64 pagesProblems HatcherHatcherHatcher100% (3)
- Basis and DimensionDocument48 pagesBasis and DimensionMuhd Faisal Samsudin100% (2)
- Test 3 MAT 1341C March 31, 2012 1Document5 pagesTest 3 MAT 1341C March 31, 2012 1examkillerNo ratings yet
- Assignment 4 Answers Math 130 Linear AlgebraDocument3 pagesAssignment 4 Answers Math 130 Linear AlgebraCody SageNo ratings yet
- Sol 4Document12 pagesSol 4Juanca AbadNo ratings yet
- Bimodal 4Document9 pagesBimodal 4Francisco Javier Puerta CollNo ratings yet
- Hints, Comments, Advises, Solutions, and AnswersDocument76 pagesHints, Comments, Advises, Solutions, and AnswersAngelito MogollonNo ratings yet
- Math113 F15 Hw4solsDocument10 pagesMath113 F15 Hw4solsebi1234No ratings yet
- Isometries of RNDocument5 pagesIsometries of RNfelipeplatziNo ratings yet
- 11161-PDF File-46147-1-10-20230818Document18 pages11161-PDF File-46147-1-10-20230818just readerNo ratings yet
- 5 Amt 2 Rev SolDocument7 pages5 Amt 2 Rev SolZakria ToorNo ratings yet
- Lag 19Document4 pagesLag 19Khmer ChamNo ratings yet
- Solucionario MeasureDocument23 pagesSolucionario MeasureDanny100% (1)
- Some Properties of Fuzzy Set.: A B B A A B B ADocument9 pagesSome Properties of Fuzzy Set.: A B B A A B B ARajesh kumarNo ratings yet
- Weakly Differentiable Functions Volume 120 - Pointwise Behavior of Sobolev FunctionsDocument65 pagesWeakly Differentiable Functions Volume 120 - Pointwise Behavior of Sobolev FunctionsHam Karim RUPPNo ratings yet
- Mat1341 TT2 2010WDocument4 pagesMat1341 TT2 2010WexamkillerNo ratings yet
- 2000 2 PDFDocument4 pages2000 2 PDFMuhammad Al KahfiNo ratings yet
- Motion Interpolation in SIMDocument36 pagesMotion Interpolation in SIMaaNo ratings yet
- Relations: Cartesian Products and RelationsDocument16 pagesRelations: Cartesian Products and RelationsSUJAL GUPTANo ratings yet
- University of Ottawa Department of Mathematics and StatisticsDocument8 pagesUniversity of Ottawa Department of Mathematics and StatisticsexamkillerNo ratings yet
- Alg 1Document26 pagesAlg 1rapsjadeNo ratings yet
- Chapter 11Document3 pagesChapter 11muhammedNo ratings yet
- Shifts of Finite TypeDocument5 pagesShifts of Finite TypeLuiz RicardoNo ratings yet
- MidallDocument23 pagesMidallLeo ChungNo ratings yet
- ( (0, 0) ) - But It's Easily Seen That F (X, Y) F ( X, Y) / ( (0, 0) ) - (This Is The Same As The Fact That Z 7 ZDocument4 pages( (0, 0) ) - But It's Easily Seen That F (X, Y) F ( X, Y) / ( (0, 0) ) - (This Is The Same As The Fact That Z 7 ZFrancesco GozziniNo ratings yet
- WWL Chen - Fundamentals of Analysis (Chapter 1)Document13 pagesWWL Chen - Fundamentals of Analysis (Chapter 1)AndrezzaNo ratings yet
- Dedicated To Professor Dr. Ioan A. Rus On His 70th BirthdayDocument17 pagesDedicated To Professor Dr. Ioan A. Rus On His 70th Birthdayfahri_amirullahNo ratings yet
- GATE Mathematics Paper-2007Document11 pagesGATE Mathematics Paper-2007RajkumarNo ratings yet
- Final ExamDocument6 pagesFinal ExamSara GallegoNo ratings yet
- Unit 1Document13 pagesUnit 1Fatema TahaNo ratings yet
- R R 1 1 1 1 1 1 1 1 R R 1 L L 1 L L 1 ADocument4 pagesR R 1 1 1 1 1 1 1 1 R R 1 L L 1 L L 1 ApeterNo ratings yet
- Math 110: Linear Algebra Homework #2Document5 pagesMath 110: Linear Algebra Homework #2Cody SageNo ratings yet
- Chapter 1 - Relations and FunctionsDocument51 pagesChapter 1 - Relations and Functionssidhusingh24No ratings yet
- Splitting of Some More Spaces: Math. Proc. Camb. Phil. Soc. (1979), 86, 227 2 2 7 Printed in Great BritainDocument10 pagesSplitting of Some More Spaces: Math. Proc. Camb. Phil. Soc. (1979), 86, 227 2 2 7 Printed in Great BritainEpic WinNo ratings yet
- Assignment 1Document3 pagesAssignment 1Shanmukesh YadavNo ratings yet
- 2 12 PDFDocument10 pages2 12 PDFRachel WatsonNo ratings yet
- Some Theorems Concerning Extrema of Brownian Motion With - Dimentional TimeDocument9 pagesSome Theorems Concerning Extrema of Brownian Motion With - Dimentional TimeRamesh KadambiNo ratings yet
- L10 L12Document4 pagesL10 L12Luise FangNo ratings yet
- Hw2sols Math3410 S23Document5 pagesHw2sols Math3410 S23taxin90604No ratings yet
- Part Hand-In For Week 2Document30 pagesPart Hand-In For Week 2Vikas BhoriaNo ratings yet
- Math II Tutorial 1Document2 pagesMath II Tutorial 1devang_siNo ratings yet
- UNIT-2 Set Theory Set: A Set Is Collection of Well Defined ObjectsDocument28 pagesUNIT-2 Set Theory Set: A Set Is Collection of Well Defined ObjectsScar GamingNo ratings yet
- Basic Properties: Umber HeoryDocument11 pagesBasic Properties: Umber HeorySomesh AwasthiNo ratings yet
- Exact Region of Stability For An Investment Plan With Three ParametersDocument8 pagesExact Region of Stability For An Investment Plan With Three ParametersChecozNo ratings yet
- Fields and RingsDocument32 pagesFields and RingsRam babuNo ratings yet
- L13 L15Document3 pagesL13 L15Luise FangNo ratings yet
- Elementary Linear AlgebraDocument197 pagesElementary Linear Algebrajilbo604No ratings yet
- 2010Fall4530HW1solfinal PDFDocument2 pages2010Fall4530HW1solfinal PDFRafael NoriegaNo ratings yet
- Homework 1 - SolutionsDocument3 pagesHomework 1 - Solutionsneelann8902No ratings yet
- Solutions To Exercises: J3) - J3) J3 - J3Document53 pagesSolutions To Exercises: J3) - J3) J3 - J3NagannaNo ratings yet
- XavierD - Domingo Math29 ProblemSet3Document5 pagesXavierD - Domingo Math29 ProblemSet3XAVIER DOMINGONo ratings yet
- Vector SpacesDocument24 pagesVector Spacesnomore891No ratings yet
- Answers 5 2012Document11 pagesAnswers 5 2012Eric KerrNo ratings yet
- HW3 SolutionnDocument4 pagesHW3 Solutionnraosahab0140No ratings yet
- Imc2000 2Document4 pagesImc2000 2Arief CahyadiNo ratings yet
- Solution 1Document12 pagesSolution 1benmenceur.kaissaNo ratings yet
- TransformationDocument2 pagesTransformationdhaval.desai98No ratings yet
- I Multiple Choice Questions: E0 219 - Linear Algebra Final ExamDocument16 pagesI Multiple Choice Questions: E0 219 - Linear Algebra Final ExamiloveaviNo ratings yet
- Real Variables with Basic Metric Space TopologyFrom EverandReal Variables with Basic Metric Space TopologyRating: 5 out of 5 stars5/5 (1)
- Lecture 9: Variance, Covariance, Correlation Coefficient: Kate Rina Sta NkováDocument76 pagesLecture 9: Variance, Covariance, Correlation Coefficient: Kate Rina Sta NkovásunilsinghmNo ratings yet
- OBTL Form 3 (Syllabus) Ver 2016-2017 (1) - CHE 323 11-17-16Document9 pagesOBTL Form 3 (Syllabus) Ver 2016-2017 (1) - CHE 323 11-17-16Zhu Chen ChuanNo ratings yet
- What's Left of Descartes? by Roger KimballDocument8 pagesWhat's Left of Descartes? by Roger Kimballj9z83fNo ratings yet
- CG r16 Unit 1 NotesDocument46 pagesCG r16 Unit 1 Noteskollavivek_534195858No ratings yet
- احمد الزهراني-شرح المنطق الرقمي بالعربيةDocument107 pagesاحمد الزهراني-شرح المنطق الرقمي بالعربيةرغوووودي رغووووديNo ratings yet
- Chapter 6Document17 pagesChapter 6GolliwogsNo ratings yet
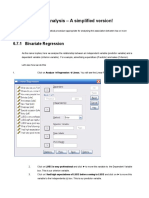
- A Simplified Version of Regression Analysis 25.11.11Document7 pagesA Simplified Version of Regression Analysis 25.11.11Shahin SamadliNo ratings yet
- Armstrong AxiomsDocument3 pagesArmstrong AxiomsVipul kumar JhaNo ratings yet
- Numbers Divisible by 4 8 11 12Document4 pagesNumbers Divisible by 4 8 11 12Rhai ManosNo ratings yet
- DBMS 11Document23 pagesDBMS 11Soha DasNo ratings yet
- FInal Prelims Paper Feb 22Document4 pagesFInal Prelims Paper Feb 22Adityan NairNo ratings yet
- P1 - Algebra: Past Papers QuestionsDocument50 pagesP1 - Algebra: Past Papers QuestionsJumanaAsimNo ratings yet
- Polynomials VideosDocument14 pagesPolynomials VideosThat One Lazy CatNo ratings yet
- Application of Derivatives in Daily LifeDocument1 pageApplication of Derivatives in Daily LifeFalcon Khan20% (5)
- Lesson 3 Operations On Whole NumbersDocument4 pagesLesson 3 Operations On Whole NumbersCristine Ann DizonNo ratings yet
- Bezier & B-Spline CurveDocument3 pagesBezier & B-Spline Curveakshay_pundeNo ratings yet
- SimultaneousDocument27 pagesSimultaneousLatchmi DeviNo ratings yet
- Sample 6181Document11 pagesSample 6181Hxhanannx0% (1)
- Ib Maths HL SL Exploration 200 IdeasDocument2 pagesIb Maths HL SL Exploration 200 IdeasShruti KabraNo ratings yet
- Mathematics: Quarter 2 - Module 4 Decimal NumbersDocument9 pagesMathematics: Quarter 2 - Module 4 Decimal NumbersApril Jean Cahoy100% (1)
- Basic MathematicsDocument676 pagesBasic Mathematicsbabar mustafaNo ratings yet
- Amc 10a 2022Document4 pagesAmc 10a 2022darrenn.cpNo ratings yet
- Advanced Integration TechniquesDocument155 pagesAdvanced Integration Techniquesspsarathy100% (1)
- Add Polynomials SEDocument5 pagesAdd Polynomials SEPagoejaNo ratings yet
- 8th Grade Enrichment Invest. Unit 9-Identifying FunctionsDocument27 pages8th Grade Enrichment Invest. Unit 9-Identifying FunctionsDenetera CobbNo ratings yet
- Applications of Manpower Levels For Business Using Six and Eight Point State Space in The Stochastic ModelsDocument5 pagesApplications of Manpower Levels For Business Using Six and Eight Point State Space in The Stochastic ModelsArumugam RajuNo ratings yet
- Math 5 - Long QuizDocument3 pagesMath 5 - Long QuizPepito Rosario Baniqued, JrNo ratings yet
- Huey Dissertation FinalDocument257 pagesHuey Dissertation FinalNathan HueyNo ratings yet
- Modelling Subjective Utility Through EntropyDocument21 pagesModelling Subjective Utility Through EntropyIrina AlexandraNo ratings yet