Download as docx, pdf, or txt
You might also like
- Samsung RH25H5611SR Service Manual PDFDocument88 pagesSamsung RH25H5611SR Service Manual PDFoayz100% (7)
- Net - Oryx Vision The Future of Mobility PDFDocument10 pagesNet - Oryx Vision The Future of Mobility PDFkthuang1No ratings yet
- Stainless Steel Price-Jindal ERW Pipes-21-12-2020Document1 pageStainless Steel Price-Jindal ERW Pipes-21-12-2020SRINIVASAN TNo ratings yet
- Lu 2016Document9 pagesLu 2016Okan DurmazNo ratings yet
- Calibration of Vissim For Bus Rapid Transit Systems in Beijing Using GPS DataDocument19 pagesCalibration of Vissim For Bus Rapid Transit Systems in Beijing Using GPS DataWahyu AriyangkaNo ratings yet
- 2009 Chaudry RanjitkarDocument15 pages2009 Chaudry RanjitkarAskhin Al ImranNo ratings yet
- Calibration of The Microsimulation Traffic Model Using Different Neural Network ApplicationsDocument19 pagesCalibration of The Microsimulation Traffic Model Using Different Neural Network ApplicationsChristian Kyle BeltranNo ratings yet
- Chapter 01Document5 pagesChapter 01Iqra GantengNo ratings yet
- Presentation April 2016Document47 pagesPresentation April 2016shadabNo ratings yet
- Calibrating Freeway Simulation Models in Vissim: Submitted byDocument24 pagesCalibrating Freeway Simulation Models in Vissim: Submitted byPaolo Angelo GutierrezNo ratings yet
- Smart Traffic Congestion Learning Model For Dynamic Emergency Vehicle Routing Using (DCN) Deep Cross Network PDFDocument4 pagesSmart Traffic Congestion Learning Model For Dynamic Emergency Vehicle Routing Using (DCN) Deep Cross Network PDFInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- An Efficient Optimal Neural Network-Based Moving Vehicle Detection in Traffic Video Surveillance SystemDocument23 pagesAn Efficient Optimal Neural Network-Based Moving Vehicle Detection in Traffic Video Surveillance SystemRaja ChandruNo ratings yet
- Vehicle Detection, Tracking and Counting For Traffic Surveillance Using Digital Image ProcessingDocument8 pagesVehicle Detection, Tracking and Counting For Traffic Surveillance Using Digital Image ProcessingIJRASETPublicationsNo ratings yet
- Calibrating Freeway Simulation Models in Vissim: Tony WoodyDocument24 pagesCalibrating Freeway Simulation Models in Vissim: Tony WoodyAshmeetGogiNo ratings yet
- 62 OperativeSpeed (MTITS2009)Document3 pages62 OperativeSpeed (MTITS2009)guido gentileNo ratings yet
- 2018-TRR-Congestion ImpDocument16 pages2018-TRR-Congestion ImpBashuNo ratings yet
- 216852Document30 pages216852krishna reddyNo ratings yet
- Image Processing Based Vehicle Detection and Tracking MethodDocument5 pagesImage Processing Based Vehicle Detection and Tracking MethodPranjali SawantNo ratings yet
- Heterogeneous Traffic Ow Modelling: A Complete Methodology: Transportmetrica September 2011Document26 pagesHeterogeneous Traffic Ow Modelling: A Complete Methodology: Transportmetrica September 2011Mahindra DeshmukhNo ratings yet
- IEEE LaTeX Template For Transactions On Magnetics 6Document15 pagesIEEE LaTeX Template For Transactions On Magnetics 6Dr.Suresh Chavhan -IIITKNo ratings yet
- A) Problem StatementDocument8 pagesA) Problem StatementRAKSHIT VELNo ratings yet
- tmpDD23 TMPDocument10 pagestmpDD23 TMPFrontiersNo ratings yet
- CTRG-2023 Paper 243Document15 pagesCTRG-2023 Paper 243Satyajit MondalNo ratings yet
- Inter-Vehicular Communication Using Packet Network TheoryDocument7 pagesInter-Vehicular Communication Using Packet Network TheoryInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Machine Learning-MothennaDocument25 pagesMachine Learning-MothennaharithNo ratings yet
- 49 - Arman e Tampere - TRC-22-00969 - R1 - AcceptedDocument26 pages49 - Arman e Tampere - TRC-22-00969 - R1 - Acceptedalison.pereiraNo ratings yet
- Calibration of Vissim-MainDocument10 pagesCalibration of Vissim-MainEric 'robo' BaafiNo ratings yet
- Jacek OSKARBSKI, Krystian BIRR, Karol ŻARSKIDocument24 pagesJacek OSKARBSKI, Krystian BIRR, Karol ŻARSKIManuel GutierrezNo ratings yet
- Traffic Prediction For Intelligent Transportation Systems Using Machine LearningDocument28 pagesTraffic Prediction For Intelligent Transportation Systems Using Machine LearningRohit RajNo ratings yet
- Calibration of Microsimulation Models - The Effect of Calibration Parameters Errors in The Models' PerformanceDocument10 pagesCalibration of Microsimulation Models - The Effect of Calibration Parameters Errors in The Models' PerformanceRea Lyn CamposanoNo ratings yet
- An Evaluation of Inter-Vehicle Ad Hoc Networks Based On Realistic Vehicular TracesDocument12 pagesAn Evaluation of Inter-Vehicle Ad Hoc Networks Based On Realistic Vehicular TracesAsma BenTiba Epouse KribiNo ratings yet
- Article 3Document21 pagesArticle 3sandhyasbfcNo ratings yet
- Application of Microscopic Simulation Model Calibration and Validation ProcedureDocument10 pagesApplication of Microscopic Simulation Model Calibration and Validation ProcedureAmul ShresthaNo ratings yet
- Transportation Research Part C: Mauro Dell'Orco, Mario Marinelli, Mehmet Ali SilguDocument13 pagesTransportation Research Part C: Mauro Dell'Orco, Mario Marinelli, Mehmet Ali SilguJulio CésarNo ratings yet
- Density Based Smart Traffic Control System Using Canny Edge DetectionDocument10 pagesDensity Based Smart Traffic Control System Using Canny Edge DetectionIJRASETPublicationsNo ratings yet
- Paper 8871Document6 pagesPaper 8871IJARSCT JournalNo ratings yet
- Computer Vision Techniques For Traffic Flow ComputDocument11 pagesComputer Vision Techniques For Traffic Flow Computharrouche riadhNo ratings yet
- Batch 10 - 22cem3s01Document23 pagesBatch 10 - 22cem3s01AkashNo ratings yet
- Journal Vehicle Speed EstimationDocument12 pagesJournal Vehicle Speed Estimationchandu speedsterNo ratings yet
- Sensors: Traffic Estimation For Large Urban Road Network With High Missing Data RatioDocument16 pagesSensors: Traffic Estimation For Large Urban Road Network With High Missing Data RatioJokosystems NigeriaNo ratings yet
- Infrastructures 06 00046 v2Document26 pagesInfrastructures 06 00046 v2Zainab A. AbdulstaarNo ratings yet
- Paper TrajecoturyDocument18 pagesPaper TrajecoturyShashankNo ratings yet
- 10.1007@978 981 15 0644 4Document9 pages10.1007@978 981 15 0644 4Amul ShresthaNo ratings yet
- AIMES Report - Melbourne Traffic Prediction - Urban PeakHourDocument23 pagesAIMES Report - Melbourne Traffic Prediction - Urban PeakHourJames Henry SmithNo ratings yet
- Dassia A Micro Simulation Approach To Diagnose Urban Freight Delivery Areas Impacts On Traffic FlowDocument7 pagesDassia A Micro Simulation Approach To Diagnose Urban Freight Delivery Areas Impacts On Traffic FlowMANAL HARAJANo ratings yet
- MAJORDocument24 pagesMAJORC RAHUL RAO.571No ratings yet
- TrafficDocument39 pagesTrafficCreate IInnocateNo ratings yet
- Data Mining FullDocument19 pagesData Mining FullTejaswini ReddyNo ratings yet
- Paper 7Document13 pagesPaper 7Irving Gomez MoralesNo ratings yet
- Da 1 IdbbDocument14 pagesDa 1 IdbbUtkarsh SinghNo ratings yet
- Artificial Intelligence Techniques For Urban Traffic ControlDocument7 pagesArtificial Intelligence Techniques For Urban Traffic ControlJulio CésarNo ratings yet
- Vehicle Tracking and Classification in Challenging Scenarios Via Slice SamplingDocument17 pagesVehicle Tracking and Classification in Challenging Scenarios Via Slice SamplingYaste YastawiqalNo ratings yet
- Video-Based Detection and Tracking Model For Traffic SurveillanceDocument17 pagesVideo-Based Detection and Tracking Model For Traffic SurveillanceHashem EL-MaRimeyNo ratings yet
- Systematic ReviewDocument24 pagesSystematic ReviewMOHAMMAD ABU KHALIFANo ratings yet
- JPT 8-1 BullockDocument20 pagesJPT 8-1 Bullockvarunsingh214761No ratings yet
- Sustainability 15 06943Document18 pagesSustainability 15 06943maniesha1438No ratings yet
- A Simulation-Based Study For The Optimization of Toll Plaza With Different Lane Configuration A Case Study of Ravi Toll Plaza Lahore, PakistanDocument9 pagesA Simulation-Based Study For The Optimization of Toll Plaza With Different Lane Configuration A Case Study of Ravi Toll Plaza Lahore, PakistanShakir AhmadNo ratings yet
- A Vision-Based Approach To Collision Prediction at Traffic IntersectionsDocument8 pagesA Vision-Based Approach To Collision Prediction at Traffic IntersectionsnamcozenginNo ratings yet
- Traffic-Net: 3D Traffic Monitoring Using A Single Camera: Mahdi Rezaei, Mohsen Azarmi, Farzam Mohammad Pour MirDocument21 pagesTraffic-Net: 3D Traffic Monitoring Using A Single Camera: Mahdi Rezaei, Mohsen Azarmi, Farzam Mohammad Pour MirRezaei MNo ratings yet
- CV For Intelligent VehiclesDocument8 pagesCV For Intelligent Vehicleskashyap35No ratings yet
- Driver's Black Box: A System For Driver Risk Assessment Using Machine Learning and Fuzzy LogicDocument6 pagesDriver's Black Box: A System For Driver Risk Assessment Using Machine Learning and Fuzzy Logickang sol ANo ratings yet
- Simulation of VANET Applications: Valentin Cristea Victor Gradinescu Cristian Gorgorin Raluca Diaconescu Liviu IftodeDocument19 pagesSimulation of VANET Applications: Valentin Cristea Victor Gradinescu Cristian Gorgorin Raluca Diaconescu Liviu Iftodevaishnavi_ece110No ratings yet
- Cast Iron Manhole Cover & GratingsDocument4 pagesCast Iron Manhole Cover & GratingsttshareefNo ratings yet
- Bharuch Bhadbhut Project SBC ReportDocument11 pagesBharuch Bhadbhut Project SBC ReportAditya BhattNo ratings yet
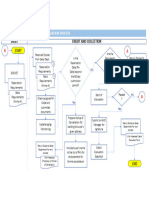
- Credit Evaluation Process FlowDocument1 pageCredit Evaluation Process FlowAbby CifraNo ratings yet
- Pumps - IntroductionDocument31 pagesPumps - IntroductionSuresh Thangarajan100% (1)
- MemSQL ColumnstoreDocument5 pagesMemSQL ColumnstoreKshitiz ChauhanNo ratings yet
- Part5 KitDocument10 pagesPart5 Kitapi-149208964No ratings yet
- HPC-Spezifikation 2.3.2 - COS Teil 1Document278 pagesHPC-Spezifikation 2.3.2 - COS Teil 1Michael LawrenceNo ratings yet
- LA-3732P IBL80 Rev.0.1Document40 pagesLA-3732P IBL80 Rev.0.1Paco ChavesNo ratings yet
- Qty. Description SP 17-29: Company Name: PT. Saka Parfima Created By: Phone: DateDocument6 pagesQty. Description SP 17-29: Company Name: PT. Saka Parfima Created By: Phone: Date'Budi Kaos HitamNo ratings yet
- Palika Bazaar PDFDocument24 pagesPalika Bazaar PDFAuwad AhmedNo ratings yet
- Chapter 9 - Water Cycle and Climate-1Document27 pagesChapter 9 - Water Cycle and Climate-1tiffybabys123No ratings yet
- DIVISIO 2000 Series - SIMPLEX - Maintenance: Author: Thomas KeimDocument20 pagesDIVISIO 2000 Series - SIMPLEX - Maintenance: Author: Thomas KeimNader KortNo ratings yet
- Earned ScheduleDocument27 pagesEarned Schedulesohail2006No ratings yet
- ACX240 LowDocument2 pagesACX240 LowHans GoetheNo ratings yet
- Fiber Spinning Quench Air Speed PDFDocument2 pagesFiber Spinning Quench Air Speed PDFMichelleNo ratings yet
- 1107 - Geneka Naturals - Cphx5401, Cphx5501, Itf1001bb, Dtlx5301, Housing 10 InchDocument2 pages1107 - Geneka Naturals - Cphx5401, Cphx5501, Itf1001bb, Dtlx5301, Housing 10 Inchaditya kumarNo ratings yet
- The Mechanism For The Esterification ReactionDocument5 pagesThe Mechanism For The Esterification Reactionuocmogiandi_aNo ratings yet
- EC 1 - Actions On StructuresDocument52 pagesEC 1 - Actions On StructuresMarcelo Zapata Muñoz0% (1)
- Mil C 26074eDocument11 pagesMil C 26074edharlanuctcomNo ratings yet
- TKE Meta200 Brochure AP 2021 v6 WebDocument27 pagesTKE Meta200 Brochure AP 2021 v6 Webwika mepNo ratings yet
- 1 Deflection Diagrams and The Elastic Curve 1Document35 pages1 Deflection Diagrams and The Elastic Curve 1DarwinNo ratings yet
- Old Code OLD R Number New Code NEW R Number Availability Phase Out Phase inDocument7 pagesOld Code OLD R Number New Code NEW R Number Availability Phase Out Phase intecnicomanelNo ratings yet
- Motivation LetterDocument1 pageMotivation LetterEmma100% (1)
- Authorized Inspector Checklist For ASME Code Fabrication ShopsDocument3 pagesAuthorized Inspector Checklist For ASME Code Fabrication ShopshorstiillingNo ratings yet
- Inbound 4435889675498454681Document1 pageInbound 4435889675498454681keepersilent2No ratings yet
- Natural RubberDocument3 pagesNatural Rubberryder1man6433No ratings yet