Download as pdf or txt
You might also like
- The Everything Store Jeff Bezos and The Age of AmazonDocument8 pagesThe Everything Store Jeff Bezos and The Age of AmazonMoiNo ratings yet
- Accessibility Design GuideDocument161 pagesAccessibility Design Guidedtmtbio9730No ratings yet
- Sample Proposal Letter-1Document2 pagesSample Proposal Letter-1Gokul Rajesh0% (1)
- Experiment-3:: Cadence Virtuoso 6.1.7 - 64bDocument9 pagesExperiment-3:: Cadence Virtuoso 6.1.7 - 64bSrujan MulkaNo ratings yet
- WP49-PUE A Comprehensive Examination of The Metric - v6Document83 pagesWP49-PUE A Comprehensive Examination of The Metric - v6alkmind100% (1)
- Contour Detection and Hierarchical Image SegmentationDocument19 pagesContour Detection and Hierarchical Image SegmentationQuynhtrang NguyenNo ratings yet
- E I R U R B I R: Fficient Mage Etrieval Sing Egion Ased Mage EtrievalDocument13 pagesE I R U R B I R: Fficient Mage Etrieval Sing Egion Ased Mage EtrievalsipijNo ratings yet
- Research Article: Saliency Mapping Enhanced by Structure TensorDocument9 pagesResearch Article: Saliency Mapping Enhanced by Structure TensordermechehakimaNo ratings yet
- Texture Classification Using Logical Operators: Vidya Manian, Ramón Vásquez, Senior Member, IEEE, and Praveen KatiyarDocument11 pagesTexture Classification Using Logical Operators: Vidya Manian, Ramón Vásquez, Senior Member, IEEE, and Praveen KatiyarkesavansrNo ratings yet
- Connected-Component LabelingDocument10 pagesConnected-Component LabelingAryan SharmaNo ratings yet
- Convolutional Neural Networks For Image Processing: An Application in Robot VisionDocument14 pagesConvolutional Neural Networks For Image Processing: An Application in Robot Visionvamsidhar2008No ratings yet
- (IJET-V1I6P15) Authors: Sadhana Raut, Poonam Rohani, Sumera Shaikh, Tehesin Shikilkar, Mrs. G. J. ChhajedDocument7 pages(IJET-V1I6P15) Authors: Sadhana Raut, Poonam Rohani, Sumera Shaikh, Tehesin Shikilkar, Mrs. G. J. ChhajedInternational Journal of Engineering and TechniquesNo ratings yet
- 10 1109@itqmis 2019 8928375Document3 pages10 1109@itqmis 2019 8928375Shit ShitNo ratings yet
- Hyperspectral Imaging System Modeling: John P. Kerekes and Jerrold E. BaumDocument14 pagesHyperspectral Imaging System Modeling: John P. Kerekes and Jerrold E. Baum'Kesowo Hari MurtiNo ratings yet
- Scene Analysis in Urban Areas Using A Knowledge-Based Interpretation SystemDocument4 pagesScene Analysis in Urban Areas Using A Knowledge-Based Interpretation SystemHonto WatashiNo ratings yet
- Analysis of Various Techniques Used For Implementation of Video Surveillance SystemDocument6 pagesAnalysis of Various Techniques Used For Implementation of Video Surveillance SystemShakeel RanaNo ratings yet
- Automated Classification of Power Quality Disturbances Using SVM and RBF NetworksDocument7 pagesAutomated Classification of Power Quality Disturbances Using SVM and RBF NetworksbajricaNo ratings yet
- An Overview of Image Processing For Traffic Applications: Nikita Sankhe, Poonam Sonar, Deven PatelDocument7 pagesAn Overview of Image Processing For Traffic Applications: Nikita Sankhe, Poonam Sonar, Deven PatelIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Radial Basis Function Networks: Yousef AkhlaghiDocument28 pagesRadial Basis Function Networks: Yousef Akhlaghimoh_750571194No ratings yet
- Comparisons of Adaptive Median Filter Based On Homogeneity Level Information and The New Generation FiltersDocument5 pagesComparisons of Adaptive Median Filter Based On Homogeneity Level Information and The New Generation FiltersInternational Organization of Scientific Research (IOSR)No ratings yet
- Semi-Automatic Generation of Transfer Functions For Direct Volume RenderingDocument8 pagesSemi-Automatic Generation of Transfer Functions For Direct Volume Renderingdante40000No ratings yet
- Radial Basis Network: An Implementation OF Adaptive Centers: Nivas Durairaj Final Project For ECE539Document33 pagesRadial Basis Network: An Implementation OF Adaptive Centers: Nivas Durairaj Final Project For ECE539Miljan KovacevicNo ratings yet
- cvpr2004 Keypoint Rahuls PDFDocument8 pagescvpr2004 Keypoint Rahuls PDFShabeeb Ali OruvangaraNo ratings yet
- Convolutional Neural NetworkDocument3 pagesConvolutional Neural NetworkShankul ShuklaNo ratings yet
- Part (3) : Butterworth Filter Gabor Filter Gaussian Filter Vesselness FilterDocument15 pagesPart (3) : Butterworth Filter Gabor Filter Gaussian Filter Vesselness FilterMahmoud Abdel-SalamNo ratings yet
- Efficient Image RetrievalDocument14 pagesEfficient Image RetrievalMarchelius KalvinNo ratings yet
- Cell Shape EstimationDocument11 pagesCell Shape EstimationAnbuselvi MathivananNo ratings yet
- Improved SIFT-Features Matching For Object Recognition: Emails: (Alhwarin, Wang, Ristic, Ag) @iat - Uni-Bremen - deDocument12 pagesImproved SIFT-Features Matching For Object Recognition: Emails: (Alhwarin, Wang, Ristic, Ag) @iat - Uni-Bremen - dethirupathiNo ratings yet
- SIFT Feature MatchingDocument12 pagesSIFT Feature MatchingethanrabbNo ratings yet
- PID3633593Document5 pagesPID3633593Sudh Desi ContentsNo ratings yet
- 2005 COST ReviewSchemesFingPrintQualityComputationDocument6 pages2005 COST ReviewSchemesFingPrintQualityComputationlmtp80No ratings yet
- 10 1109@MCS 2019 2938121Document72 pages10 1109@MCS 2019 2938121fermaruyNo ratings yet
- Formato Proyecto I+DDocument3 pagesFormato Proyecto I+DVanessa Fontalvo renizNo ratings yet
- Primal Sketch: Integrating Structure and Texture ?: Cheng-En Guo, Song-Chun Zhu, and Ying Nian WuDocument26 pagesPrimal Sketch: Integrating Structure and Texture ?: Cheng-En Guo, Song-Chun Zhu, and Ying Nian WuGautam JhaNo ratings yet
- Chapter - 1: 1.1 OverviewDocument50 pagesChapter - 1: 1.1 Overviewkarthik0484No ratings yet
- Sensor PerfDocument12 pagesSensor Perfenaam1977No ratings yet
- A Tracking Technology of Feature Point's Fuzzy Clustering Algorithm Based On Image StabilizationDocument8 pagesA Tracking Technology of Feature Point's Fuzzy Clustering Algorithm Based On Image StabilizationswoneraNo ratings yet
- Introduction of The Radial Basis Function (RBF) Networks: February 2001Document8 pagesIntroduction of The Radial Basis Function (RBF) Networks: February 2001jainam dudeNo ratings yet
- Detection of Rooftop Regions in Rural Areas Using Support Vector MachineDocument5 pagesDetection of Rooftop Regions in Rural Areas Using Support Vector MachineijsretNo ratings yet
- Article 1Document8 pagesArticle 1erick_abrahamNo ratings yet
- Project Report: Optical Character Recognition Using Artificial Neural NetworkDocument9 pagesProject Report: Optical Character Recognition Using Artificial Neural NetworkRichard JamesNo ratings yet
- Texture SegmentationDocument18 pagesTexture SegmentationMutiaraMalikaPutriNo ratings yet
- Xilinx System Generator PDFDocument15 pagesXilinx System Generator PDFDr-Atul Kumar DwivediNo ratings yet
- Matching Images Features in A Wide Base Line With ICA DescriptorsDocument4 pagesMatching Images Features in A Wide Base Line With ICA Descriptorsrf_munguiaNo ratings yet
- Learning of Alphabets Using Kohonen's Self Organized Featured MapDocument5 pagesLearning of Alphabets Using Kohonen's Self Organized Featured MapInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Comparison of Morphological, Averaging & Median FilterDocument2 pagesComparison of Morphological, Averaging & Median FilterIJMERNo ratings yet
- Adaptive Trimmed Mean Filters For Image RestorationDocument3 pagesAdaptive Trimmed Mean Filters For Image Restorationkarthik rajuNo ratings yet
- Nonlintools: GUI Tool For Analysis and Design of Nonlinear Control SystemDocument4 pagesNonlintools: GUI Tool For Analysis and Design of Nonlinear Control SystemBayeNo ratings yet
- Face Recognition Using DCT - DWT Interleaved Coefficient Vectors With NN and SVM ClassifierDocument6 pagesFace Recognition Using DCT - DWT Interleaved Coefficient Vectors With NN and SVM ClassifiertheijesNo ratings yet
- Wavelet-Based Image Compression Using Mathematical Morphology and Self Organizing Feature MapDocument6 pagesWavelet-Based Image Compression Using Mathematical Morphology and Self Organizing Feature MapRoshan JayswalNo ratings yet
- CP01 MineIT97 PDFDocument9 pagesCP01 MineIT97 PDFIoannis KapageridisNo ratings yet
- Comparison of Edge Detectors: Ayaz Akram, Asad IsmailDocument9 pagesComparison of Edge Detectors: Ayaz Akram, Asad IsmailRamSharmaNo ratings yet
- Membership Function Formulation Methods For Fuzzy Logic Systems: A Comprehensive ReviewDocument17 pagesMembership Function Formulation Methods For Fuzzy Logic Systems: A Comprehensive Reviewvobix79711No ratings yet
- A Face Recognition Scheme Based On Principle Component Analysis and Wavelet DecompositionDocument5 pagesA Face Recognition Scheme Based On Principle Component Analysis and Wavelet DecompositionInternational Organization of Scientific Research (IOSR)No ratings yet
- Median Filtering Frameworks and Their Application To Image EnhancementDocument4 pagesMedian Filtering Frameworks and Their Application To Image EnhancementInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Classification of Surface Defects On Hot Rolled Steel Adaptive Learning MethodsDocument6 pagesClassification of Surface Defects On Hot Rolled Steel Adaptive Learning MethodsJovid RakhmonovNo ratings yet
- Department of Signal Theory and Communications: Ph.D. DissertationDocument14 pagesDepartment of Signal Theory and Communications: Ph.D. DissertationIlninjataroccoNo ratings yet
- BANDOQUILLO-LINEARALGEBRADocument2 pagesBANDOQUILLO-LINEARALGEBRAMichelle BandoquilloNo ratings yet
- Robust Rule Based Local Binary Pattern Method For Texture Classification and AnalysisDocument4 pagesRobust Rule Based Local Binary Pattern Method For Texture Classification and AnalysisInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Imaging Vector Fields Using Line Integral Convolution: Presented by Farial ShahnazDocument51 pagesImaging Vector Fields Using Line Integral Convolution: Presented by Farial Shahnazankitpareek4No ratings yet
- The Math Behind Convolutional Neural Networks - Towards Data ScienceDocument37 pagesThe Math Behind Convolutional Neural Networks - Towards Data ScienceH YNo ratings yet
- Dimensionality ReductionDocument7 pagesDimensionality ReductionM Hafidh Dliyaul HaqNo ratings yet
- PCA Based Image Enhancement in Wavelet DomainDocument5 pagesPCA Based Image Enhancement in Wavelet Domainsurendiran123No ratings yet
- Optical Flow: Exploring Dynamic Visual Patterns in Computer VisionFrom EverandOptical Flow: Exploring Dynamic Visual Patterns in Computer VisionNo ratings yet
- Out of This World Manual DOSDocument5 pagesOut of This World Manual DOSAnonymous FGY7goNo ratings yet
- Nec Multisync® Lcd2170Nx: Fully Featured Office Monitors With Outstanding Display Quality and Ergonomic PerformanceDocument2 pagesNec Multisync® Lcd2170Nx: Fully Featured Office Monitors With Outstanding Display Quality and Ergonomic PerformanceAnonymous FGY7goNo ratings yet
- Myers InterfDocument18 pagesMyers InterfAnonymous FGY7goNo ratings yet
- Sphere Vs 45°-0°Document8 pagesSphere Vs 45°-0°Anonymous FGY7goNo ratings yet
- Motion Blue Base Image v5Document31 pagesMotion Blue Base Image v5Anonymous FGY7goNo ratings yet
- Structured Light 110429 09 Rueckwardt MeasurementDocument17 pagesStructured Light 110429 09 Rueckwardt MeasurementAnonymous FGY7goNo ratings yet
- Thiebaut 2008 MarseilleDocument12 pagesThiebaut 2008 MarseilleAnonymous FGY7goNo ratings yet
- The Non-Coplanar Baselines e Ffect in Radio Interferometry: The W-Projection AlgorithmDocument12 pagesThe Non-Coplanar Baselines e Ffect in Radio Interferometry: The W-Projection AlgorithmAnonymous FGY7goNo ratings yet
- Chapter InterferometryDocument21 pagesChapter InterferometryAnonymous FGY7goNo ratings yet
- Wide-Field Imaging Interferometry Spatial-Spectral Image Synthesis AlgorithmsDocument1 pageWide-Field Imaging Interferometry Spatial-Spectral Image Synthesis AlgorithmsAnonymous FGY7goNo ratings yet
- Embankments On Soft SoilsDocument8 pagesEmbankments On Soft SoilsAdrian Liviu BugeaNo ratings yet
- TuteSheet 1 Phool SInghDocument2 pagesTuteSheet 1 Phool SInghhimanshumalNo ratings yet
- MotioCI DatasheetDocument2 pagesMotioCI DatasheetchenyanivNo ratings yet
- Vimeo OTT Mobile SDKDocument16 pagesVimeo OTT Mobile SDKkeen footwearNo ratings yet
- Food Chemistry: M.S. Altaki, F.J. Santos, M.T. GalceranDocument6 pagesFood Chemistry: M.S. Altaki, F.J. Santos, M.T. GalceranAberuNo ratings yet
- Admissions To Public Other Insitutions For Ay 2023-2024Document396 pagesAdmissions To Public Other Insitutions For Ay 2023-2024KamanziNo ratings yet
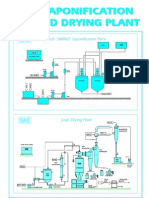
- +sapo & Drying PlantDocument4 pages+sapo & Drying Plantزياد محمدNo ratings yet
- Flight Controls Lesson PlanDocument496 pagesFlight Controls Lesson Planbft23No ratings yet
- Oral Comm Summative Test 2022Document2 pagesOral Comm Summative Test 2022Roland John MarzanNo ratings yet
- Worksheet PrognosisDocument3 pagesWorksheet PrognosisAmieyAtlantaMayNo ratings yet
- Sde620 PDFDocument14 pagesSde620 PDFMaya RamakrishnanNo ratings yet
- COM3LAB Help PDFDocument28 pagesCOM3LAB Help PDFraul_bsuNo ratings yet
- Outline For Industry Internship Report SA1 SA2 SA3Document6 pagesOutline For Industry Internship Report SA1 SA2 SA3jahasmmNo ratings yet
- 7.3 Broadcast ReceiversDocument33 pages7.3 Broadcast Receiversdimasmaendra1213No ratings yet
- Backstepping Based Control of PV System Connected To The GridDocument6 pagesBackstepping Based Control of PV System Connected To The GridAin KaloiNo ratings yet
- Thermal Stratification CFDDocument15 pagesThermal Stratification CFDms280674No ratings yet
- Big Finish Vortex 55Document24 pagesBig Finish Vortex 55P RollinsNo ratings yet
- Lab Discussion and Conclusion Report PDFDocument2 pagesLab Discussion and Conclusion Report PDFRadz Krishz100% (1)
- PepsiDocument9 pagesPepsifaizaNo ratings yet
- Ecce Writing TopicsDocument2 pagesEcce Writing TopicsΚώστας ΚολλιδάκηςNo ratings yet
- The Man Who Knew InfinityDocument2 pagesThe Man Who Knew InfinitykskskNo ratings yet
- Compatibility List First Page of Section: Tape Drive and Library Compatibility Matrix Oracle Secure Backup 10.4.0.1Document12 pagesCompatibility List First Page of Section: Tape Drive and Library Compatibility Matrix Oracle Secure Backup 10.4.0.1kwanlok.chanNo ratings yet
- 4 TMDocument4 pages4 TMMaham KhanNo ratings yet
- Bozhan Tif ch04Document12 pagesBozhan Tif ch04Jimmi SinghNo ratings yet
- Monophyly: Phylogenetic TreeDocument7 pagesMonophyly: Phylogenetic Tree62991No ratings yet