Download as pdf or txt
You might also like
- Ph.d. 2015 Adam HyllestedDocument228 pagesPh.d. 2015 Adam Hyllestedshshsh123465650% (1)
- Computational Techniques of The Simplex MethodDocument334 pagesComputational Techniques of The Simplex MethodJINEETH JJOSEPHNo ratings yet
- Projective GeometryDocument14 pagesProjective GeometryJaymie Cassandra DioNo ratings yet
- Elliptic Curve Cryptography Final Report For A Project in Computer SecurityDocument36 pagesElliptic Curve Cryptography Final Report For A Project in Computer SecurityAnjishnu MahantaNo ratings yet
- Past-Future Asymmetry of The Gravitational Field of A Point ParticleDocument3 pagesPast-Future Asymmetry of The Gravitational Field of A Point ParticleBenjamin CrowellNo ratings yet
- 1964 - Marchand - Derivation of The Point Spread Function From The Line Spread Function - Journal of The Optical Society of America PDFDocument5 pages1964 - Marchand - Derivation of The Point Spread Function From The Line Spread Function - Journal of The Optical Society of America PDFClaudio BiaginiNo ratings yet
- Michael Weiss - Lie Groups and QM PDFDocument20 pagesMichael Weiss - Lie Groups and QM PDFdogbitesmanNo ratings yet
- ebk • Faugeras_O_et_al ® The_Geometry_of_Multiple_Images_the_Laws_That_Govern_the_Formation_of_Multiple_Images_of_a_Scene_Andsome_of_Their_Applications @ The_Mit_Press © 2001Document645 pagesebk • Faugeras_O_et_al ® The_Geometry_of_Multiple_Images_the_Laws_That_Govern_the_Formation_of_Multiple_Images_of_a_Scene_Andsome_of_Their_Applications @ The_Mit_Press © 2001Donato FormicolaNo ratings yet
- Manifolds, Tangent Spaces, Cotangent Spaces, Vector Fields, Flow, Integral CurvesDocument90 pagesManifolds, Tangent Spaces, Cotangent Spaces, Vector Fields, Flow, Integral Curveshammoudeh13No ratings yet
- MIR - LML - Shilov G. E. - Plotting GraphsDocument36 pagesMIR - LML - Shilov G. E. - Plotting Graphsavast2008No ratings yet
- Plane GeometriesDocument5 pagesPlane GeometriesAdi SubbuNo ratings yet
- Post MexicoDocument10 pagesPost MexicoEpic WinNo ratings yet
- Projective GeoDocument24 pagesProjective GeoArnel Macutay JrNo ratings yet
- Stereographic ProjectionDocument3 pagesStereographic Projectionap021No ratings yet
- MIR - LML - Markushevich A. I. - Areas and LogarithmsDocument76 pagesMIR - LML - Markushevich A. I. - Areas and Logarithmsavast2008100% (5)
- Drawing With Complex NumbersDocument14 pagesDrawing With Complex NumbersTyterbipNo ratings yet
- Gauss - Riemann - Einstein: Michael P. WindhamDocument25 pagesGauss - Riemann - Einstein: Michael P. WindhamalexlhhcasNo ratings yet
- Donald Knuth, 1979, Mathematical Typografy, Bull. Amer. Math. Soc. (N.S.) Volume 1, Number 2 (1979), 337-372 PDFDocument36 pagesDonald Knuth, 1979, Mathematical Typografy, Bull. Amer. Math. Soc. (N.S.) Volume 1, Number 2 (1979), 337-372 PDFAndreaNo ratings yet
- Lecture 3: Perturbative Renormalization (Continued) : 3.1. Local Functionals in A Classical Eld TheoryDocument17 pagesLecture 3: Perturbative Renormalization (Continued) : 3.1. Local Functionals in A Classical Eld TheoryluisdanielNo ratings yet
- J. P. MayDocument14 pagesJ. P. MayEpic WinNo ratings yet
- Geometry NotesDocument47 pagesGeometry NoteswalczakcNo ratings yet
- S.V. Chmutov, S.V. Duzhin and A. I. Kaishev - The Algebra of 3-GraphsDocument32 pagesS.V. Chmutov, S.V. Duzhin and A. I. Kaishev - The Algebra of 3-GraphsGmoniconNo ratings yet
- Mathematical DiagramDocument5 pagesMathematical Diagramwoodword99No ratings yet
- Vanishing Point Detection in The Hough Transform SpaceDocument8 pagesVanishing Point Detection in The Hough Transform Spacepepethefrogg45No ratings yet
- Chap 2Document11 pagesChap 2zl7391eNo ratings yet
- Regensburg 2007 PDFDocument23 pagesRegensburg 2007 PDFGerman ChiappeNo ratings yet
- Kama Da 1989Document9 pagesKama Da 1989kleopanNo ratings yet
- Unit 3Document9 pagesUnit 3Agresia SabubunNo ratings yet
- Optical Conformal Mapping 1Document12 pagesOptical Conformal Mapping 1socialbeing006No ratings yet
- Paper - Central Projection in Excel An Introduction To Virtual Reality - Jan Benacka - 2013Document10 pagesPaper - Central Projection in Excel An Introduction To Virtual Reality - Jan Benacka - 2013Singgih Satrio WibowoNo ratings yet
- Exploring Negative Space: Log Cross Ratio 2iDocument11 pagesExploring Negative Space: Log Cross Ratio 2iSylvia Cheung100% (2)
- 11792-PDF File-45598-2-10-20230710Document26 pages11792-PDF File-45598-2-10-20230710bwzfacgbdjapqbpuywNo ratings yet
- The Logical Foundations of Analytic GeometryDocument7 pagesThe Logical Foundations of Analytic GeometryGeorge Mpantes mathematics teacherNo ratings yet
- A Curvature Invariant Inspired by Leonhard Euler's InequalityDocument9 pagesA Curvature Invariant Inspired by Leonhard Euler's Inequalitycloz54No ratings yet
- Rotating Saddle Trap: A Coriolis Force in An Inertial Frame: 1 Introduction and BackgroundDocument17 pagesRotating Saddle Trap: A Coriolis Force in An Inertial Frame: 1 Introduction and BackgroundFishboneNo ratings yet
- Elliptic CurveDocument12 pagesElliptic CurveHolman Alejandro Pérez AyalaNo ratings yet
- A Topological Approach To Evasiveness PDFDocument11 pagesA Topological Approach To Evasiveness PDFrjmantillaNo ratings yet
- Cal1 Export PDFDocument246 pagesCal1 Export PDFamarNo ratings yet
- Physics 364: Problem Set 3Document2 pagesPhysics 364: Problem Set 3MachodogNo ratings yet
- 1 s2.0 0022404977900305 MainDocument14 pages1 s2.0 0022404977900305 Mainwlrsw101No ratings yet
- Mathematics and Art-Marc FrantzDocument61 pagesMathematics and Art-Marc FrantzEirini ChatzaraNo ratings yet
- The Vitruvian Figure of Eight: Joel C. Langer Mathematics Department Case Western Reserve UniversityDocument6 pagesThe Vitruvian Figure of Eight: Joel C. Langer Mathematics Department Case Western Reserve UniversityParvathi NNo ratings yet
- Similarity TransofmationDocument15 pagesSimilarity Transofmationsubbu205No ratings yet
- Encyclopedia of Mathematical Physics Vol.3 I-O Ed. Fran Oise Et AlDocument643 pagesEncyclopedia of Mathematical Physics Vol.3 I-O Ed. Fran Oise Et AlDavid Iveković100% (7)
- Unpaired Image-to-Image Translation Using Cycle-Consistent Adversarial NetworksDocument20 pagesUnpaired Image-to-Image Translation Using Cycle-Consistent Adversarial NetworksBobbiNo ratings yet
- Measuring 3D Point Configurations in Pictorial Space: Johan - Wagemans@psy - Kuleuven.beDocument35 pagesMeasuring 3D Point Configurations in Pictorial Space: Johan - Wagemans@psy - Kuleuven.beJoseph WhiteNo ratings yet
- Geometry11 MergedDocument48 pagesGeometry11 Mergedmohamed hussein omarNo ratings yet
- Manifolds Tangent Vectors 2015Document33 pagesManifolds Tangent Vectors 2015Grant HeilemanNo ratings yet
- Banach Tarski BallDocument13 pagesBanach Tarski BallpidoNo ratings yet
- 1 M M M I J 1 I, J MDocument10 pages1 M M M I J 1 I, J Mpicard82No ratings yet
- Abhandlungen Der Koniglichen Gesellschaft Der Wissenschaften Zu Gottingen, Vol. 13.Document38 pagesAbhandlungen Der Koniglichen Gesellschaft Der Wissenschaften Zu Gottingen, Vol. 13.Tamanduah BandeiraNo ratings yet
- Conn Es 1999Document78 pagesConn Es 1999luisufspaiandreNo ratings yet
- MMA320 Introduction To Algebraic Geometry Jan Stevens Matematik G Oteborgs UniversitetDocument71 pagesMMA320 Introduction To Algebraic Geometry Jan Stevens Matematik G Oteborgs UniversitethalcemailNo ratings yet
- Unit-1.PDF Analytical GeometryDocument15 pagesUnit-1.PDF Analytical Geometrysudersanaviswanathan100% (1)
- Elliptic CurveDocument14 pagesElliptic Curvesticker592No ratings yet
- Vanishing Point: Exploring the Limits of Vision: Insights from Computer ScienceFrom EverandVanishing Point: Exploring the Limits of Vision: Insights from Computer ScienceNo ratings yet
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121From EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121No ratings yet
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)From EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)No ratings yet
- Unicode Basic LatinDocument6 pagesUnicode Basic LatinAKMARNo ratings yet
- How To Pronounce Latin WordsDocument2 pagesHow To Pronounce Latin Wordsshshsh12346565No ratings yet
- Museum EducationDocument9 pagesMuseum Educationshshsh12346565No ratings yet
- Forschungen 61/1954/, 147-169 (That Is To Say Subsequent To The Deciphering ofDocument16 pagesForschungen 61/1954/, 147-169 (That Is To Say Subsequent To The Deciphering ofshshsh12346565No ratings yet
- Acta Classica XXI (: Archaeological EvidenceDocument13 pagesActa Classica XXI (: Archaeological Evidenceshshsh12346565No ratings yet
- Flyer Product 52913 enDocument2 pagesFlyer Product 52913 enshshsh12346565No ratings yet
- 0203partwritinghorizontal PDFDocument1 page0203partwritinghorizontal PDFshshsh12346565No ratings yet
- 44 WW W WW W B WW W BB: Triad Shapes To Be Used in The SandwichDocument1 page44 WW W WW W B WW W BB: Triad Shapes To Be Used in The Sandwichshshsh12346565No ratings yet
- A1998DendronEngl PDFDocument37 pagesA1998DendronEngl PDFshshsh12346565No ratings yet
- Chord Vs Scales Poster 11x17Document1 pageChord Vs Scales Poster 11x17shshsh12346565100% (1)
- Major Modes GuideDocument6 pagesMajor Modes Guideshshsh12346565No ratings yet
- 0202partwritingvertical PDFDocument1 page0202partwritingvertical PDFshshsh12346565No ratings yet
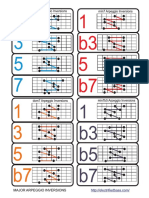
- Major Arpeggio Inversions Bass Guitar PDFDocument1 pageMajor Arpeggio Inversions Bass Guitar PDFshshsh12346565No ratings yet
- Police Dogs From Albania As Indicators of Exposure Risk To Toxoplasma Gondii, Neospora Caninum and Vector-Borne Pathogens of Zoonotic and Veterinary ConcernDocument13 pagesPolice Dogs From Albania As Indicators of Exposure Risk To Toxoplasma Gondii, Neospora Caninum and Vector-Borne Pathogens of Zoonotic and Veterinary Concernshshsh12346565No ratings yet
- Chan-An Introduction To Timoshenko Beam Formulation and Its FEM ImplementationDocument30 pagesChan-An Introduction To Timoshenko Beam Formulation and Its FEM ImplementationamaliaconstantinNo ratings yet
- Paper: Iit-Jam 2008Document5 pagesPaper: Iit-Jam 2008Mr MNo ratings yet
- Grinstead, Snell. Introduction To Probability. Errata (October 2006) (9s) - MVDocument9 pagesGrinstead, Snell. Introduction To Probability. Errata (October 2006) (9s) - MVKami UpatNo ratings yet
- A4 - Periodical Test Q3 Math 4 Melc BasedDocument5 pagesA4 - Periodical Test Q3 Math 4 Melc BasedDivine MananapNo ratings yet
- Sow Add Maths Form 4 2022Document24 pagesSow Add Maths Form 4 2022Wan Ali SaifuddinNo ratings yet
- Multi SpatDocument25 pagesMulti SpatEdison Morera EstevezNo ratings yet
- Multiplicity Results For Generalized Mean Curvature OperatorDocument6 pagesMultiplicity Results For Generalized Mean Curvature Operatorcristi7sNo ratings yet
- Assignment 1 (B.SC - II) Charpit's MethodDocument2 pagesAssignment 1 (B.SC - II) Charpit's MethodMohammadFaizan71% (7)
- FC Exercises3Document16 pagesFC Exercises3Supertj666No ratings yet
- SPR 17 - T2 - Form A - BlankDocument11 pagesSPR 17 - T2 - Form A - BlankUser UserNo ratings yet
- Test 1 Mat183Document2 pagesTest 1 Mat183nurr aleyaaNo ratings yet
- Zelich Liang TheoremDocument21 pagesZelich Liang TheoremGE AustraliaNo ratings yet
- MAN-102, Tutorial Sheet-1: Linear Algebra: (Vector SpringDocument2 pagesMAN-102, Tutorial Sheet-1: Linear Algebra: (Vector SpringSHIVAM MAANNo ratings yet
- NM Hemraj NotesDocument187 pagesNM Hemraj NotesAkash paudelNo ratings yet
- A4 - G10 - Q3 - Module 1 - MELC 1&2Document10 pagesA4 - G10 - Q3 - Module 1 - MELC 1&2Jayzi VicenteNo ratings yet
- Formulas For Computing Geometry and CriticalDocument6 pagesFormulas For Computing Geometry and Criticalpramods_8No ratings yet
- Geometrical Significance of X Coordinate, Y Coordinate, and Z Coordinate in SpaceDocument11 pagesGeometrical Significance of X Coordinate, Y Coordinate, and Z Coordinate in SpaceHridyanshu Singh RoyNo ratings yet
- MGMT FinalsDocument3 pagesMGMT FinalsJune CostalesNo ratings yet
- ALGEBRADocument78 pagesALGEBRAVenom 8055No ratings yet
- KS2 - 2001 - Mathematics - Test CDocument16 pagesKS2 - 2001 - Mathematics - Test Chenry_g840% (1)
- 2020 Putnam SolutionsDocument20 pages2020 Putnam SolutionsRaiyan ZannatNo ratings yet
- ZGJKH SXD Y3 Arc ZYWVNusDocument48 pagesZGJKH SXD Y3 Arc ZYWVNusTanvi Tamanna Tamanna DashNo ratings yet
- KTMT HN - ch02.DataRepresentationDocument52 pagesKTMT HN - ch02.DataRepresentationNguyênNo ratings yet
- Quantech Lesson-1Document36 pagesQuantech Lesson-1mohed ahmedNo ratings yet
- Algebra Regents Content Review PacketDocument26 pagesAlgebra Regents Content Review Packetapi-264817418100% (1)
- Chapter 2 - Differential CalculusDocument88 pagesChapter 2 - Differential Calculuskit199411No ratings yet
- Cem 800Document23 pagesCem 800RamakrishnanSwamyIyerNo ratings yet
- Form 3 - Chapter 11Document7 pagesForm 3 - Chapter 11Cikgu SaripahNo ratings yet
- Allen: Career InstituteDocument52 pagesAllen: Career Institutermegha7708No ratings yet