
T1967 76
T1967 76
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Goldstein R J Fluid Mechanics MeasurementsDocument1 pageGoldstein R J Fluid Mechanics MeasurementsAnonymous hWj4HKIDOFNo ratings yet
- Schedule PlanDocument3 pagesSchedule PlanAnonymous hWj4HKIDOFNo ratings yet
- Jadwal Juli - Oktober 2016 HarianDocument1 pageJadwal Juli - Oktober 2016 HarianAnonymous hWj4HKIDOFNo ratings yet
- Tedy Kuswara: A StorytellerDocument1 pageTedy Kuswara: A StorytellerAnonymous hWj4HKIDOFNo ratings yet
- Departemen TsaqofahDocument9 pagesDepartemen TsaqofahAnonymous hWj4HKIDOFNo ratings yet
- LulusDocument2 pagesLulusAnonymous hWj4HKIDOFNo ratings yet
- Jadwal Persiapan S2 v2Document1 pageJadwal Persiapan S2 v2Anonymous hWj4HKIDOFNo ratings yet
- The Speed of Trust: Based On The Book by Stephen MR CoveyDocument34 pagesThe Speed of Trust: Based On The Book by Stephen MR CoveyAnonymous hWj4HKIDOF100% (1)
- 5716159Document34 pages5716159Anonymous hWj4HKIDOFNo ratings yet
- Rundown Diklat Guru Nasional 2013 PrintDocument5 pagesRundown Diklat Guru Nasional 2013 PrintAnonymous hWj4HKIDOFNo ratings yet
- 0000 Design by Optimization of An Axial-Flux Permanent-Magnet Synchronous MotorDocument5 pages0000 Design by Optimization of An Axial-Flux Permanent-Magnet Synchronous MotorAnonymous hWj4HKIDOF100% (1)
- Makalah Lib - Agama.docx WokeDocument6 pagesMakalah Lib - Agama.docx WokeAnonymous hWj4HKIDOFNo ratings yet
- Chapter 2 - Macromechanical Analysis of A Lamina Exercise SetDocument12 pagesChapter 2 - Macromechanical Analysis of A Lamina Exercise SetAnonymous hWj4HKIDOFNo ratings yet
- 3241 Lecture 2Document8 pages3241 Lecture 2Anonymous hWj4HKIDOFNo ratings yet






















































Download as pdf
UNDERSTANDING THE VIBRATION FORCES
IN INDUCTION MOTORS
by
Michael J. Costello
President
Magnetic Products and Services, Incorporated
Hocston Texas
Michael J. Costello graduated from
New Jersey Institute of Technology in
1880 ax an Electrical Engineer. Since
then, he has been employed by Nippes
Professional Associates and became Fres
dont of te subsidiary, Magnetic Products
fand Sereies, in July 1985. He has per-
formed electrical and substation design of
‘power systems, and considerable analysis
Fhe performance of rotting electrical
‘machines up to 500 MW.
Mr. Costello has developed and plemented a Witness Accep-
tance Testing, Manufacturing Inspection and Project Specifea-
tions Program for clients, mostly in the petrochemical industry.
He ts a member of the IEEE and is presently serving on the
Working Committee PII for the revision of Standards on Tet
ing Induction Motors as well a the Induction Machinery Sub-
committe of PES. Hats aloo amember of The Vibration Institut,
ABSTRACT
Squirrel cage induction motorshave been used extensively in
industry for over 50 years. While it appears that vibration prob-
Tems are more pronounced nowadays, certain basic construction
features have always existed and have created considerable difi-
culty from the intial stages of motor development. As induction
‘motor theory has never changed, the electromechanical forcing
functions have always existed and created vibration problems.
Infact, some ofthe most complete and best references on vibrax
tion in indvetion motors were written 30 to 40 years ago It ap-
eats, however, that only recently has the induetion motor been
Critically reviewed by mechanical engineers and rotating
‘machinery specialists. Motors are now being treated fo: what
they are~ extremely complex rotating machines having not only
the associated mechanical forces, but electromagnetic and elec-
twomechanical forees as well. The basic operating principles of
motors are discussed as wells the lateral vibration forcing func-
tions encountered when troubleshooting motor vibration prob-
lems. All motors described herein are squirtel cage, polyphase,
60H design
INTRODUCTION
‘The present trend in industry is towards long term relisility
‘on all major equipment. In order to accomplish this, more and
‘more motors are being outfitted for vibration and temperature
‘monitoring systems. While proximity probes have been in serv~
ice to measure vibration for over 20 years on turbines and oo
pressors, most motor manufacturers have not used them until
the last five to seven years, It was only five years ago when &
‘manufacturer stated he knew a motor’s mechanical performance
0
‘was acceptable when he could stand anickel on end on the bear
ing housing.
‘There is no doubt thatthe induction motor has evolved eon-
siderably over the past 20 years; however, this evolution was die
tated privarily from an electrical standpoint. Insulation mate-
rials were developed which allowed manufacturers to build
larger horsepower machines, and run them at progressively
higherand higher temperatures. As an aftermath of government
Tegal actions inthe 1950s, the “White Sale” eliminated price fix-
{ng between the manufacturers. This brought competition and
effectively lowered motor prices drastically. During the 1960s
and 1970s, material improvements and new manufacturing pro-
cedures resulted in significantly more efficient machines. Motor
base prices continued to dropand even now are lower than they
‘were 15 years ago. During this period, the mechanical arpect of
the motor beeame altered signifantiy: Motor frames were re-
uced in physical size, weight, ard structural strength for @
given horsepower. However, they were stil to contain the same
forces as ther larger and more robust predecessors
‘As a result of recent problems, the need for equipment relia-
bility, more knowledge in rotordynamies sad more stringent
user specifiations, motor manufacturers are presently being
forced to evaluate their product's mechanical performance:
INDUCTION MOTOR OPERATING PRINCIPLES
‘Tounderstand the operation ofan induction motor, itisimpor
tant to become familiar with its major eomponents. A cutaway
of typical large motor is shown in Figure I-A squirrel cage n=
duction motor consists of the following major components
* Stator—The stator consists of an electrical winding and a
cylindrical laminated steel core in which the winding coils are
inserted. After insertion, the colls are connected ina manner to
produce alternate pole polarity, the number of which dictates
the speed of the motor.
* Rotor—The rotor is made up of a shaft, and a cylindrical
laminated steel core in which the rotor winding is inserted. In
a squirrel cage design, the rotor winding consists of nonmagne-
tic bars which are inserted through slots in the core. The bar
tends connect to end rings which short circuit the bars. The bars
and end rings together make up the rotor “squirrel cage.”
+ Frame—The frame of the machine i either a fabricated or
cast structure in which the stator is inserted. This frame must
be strong enough to withstand mechanical and electromechani-
cal forces along with providing ar passages employed to cool the
motor.
‘+ Endlosure— Various enclosures can be specified such as DP
(dip proof, WPI (weather protected 1), WEIL (weather pro-
tected TI), TEWAC (totaly enclosed, wateraircooled), ete,
‘These enclosures are either integral with or are installed on top,
bottom, or sides ofthe frame
‘The basie theory of the induction motor is actually very sim
ple, As an alternating polyphase voltage Is applied to the ends
of the stator windings, currents flowing in coil groups produce
‘multipole alternating magnetic field which rotates around the
Figure 1. Cutaway of a Typical Large Squirrel Cage Induction
Motor Outlining the Various Major Components.
stator ID."The number of alternate polarity magnetic poles set
tup by the winding connections dictate the speed ofthe rotating
‘magnet eld, The motoe synchronous speed is as follows;
motor synchronous speed =
120 x frequeney of applied voltage (H2)
‘umber of poles
Currents in the rotor cage are induced across the air gap of
the motor in amanner similar to those induced inthe secondary
of a transformer. It is diferent from the transformer, however,
since the secondary or rotor winding rotates physially, trying
to gain synchronism with the stator winding rotating field [1).
‘The rotor cannot achieve synchronism because of torque or load
‘on its shaft. The amount of speed by which the rotor lags the
stator synchronous field is called “slip.” The amount of slip and
‘motor eurrent are higher as the motor torque ad i increased,
Asthe field rotates around the stator, the reactionary tangential
force, which isa function of load torque, core loss, and fricon
and windage losses, slips behind the stator magnetic field.
‘Under no load conditions, sip is low because torque needs only
to overcome the core and friction and windage losses; however,
a slight current is induced in the rotor cage. Because of this,
some slip is present even at no load, therefore, synchronous
speed can never be reached.
“The torque to azceletate an inertial load to an operating
speed, will at any speed, be equal tothe difference between the
‘motor torque developed and the load torque. The motor torque
isa funetion of the apolied voltage during starting conditions,
and the load torque usually varies with speed, The rae of accel-
tration is proportional to this torque dilerence, and the motor
will hang up at a low speed value if the torque differential
reaches zero. This may also occur ifthe motor design isch that
its speed characteristie curve has parasitic torques or cusps
ERY SYMPOSIUM.
MOTOR VIBRATION
Vibration analysis and rotordynamics has hecome scence in
itself, generally sued and reviewed by mechanical engineers
or rotating machisery specialists, I isnot uncommon for
bine and compressor rotors to soccesflly operate at speeds in
exces of 2,000 rpm. Therefore, nos otating machinery spe-
alist cannot understand how motors, having maxim speeds
{of 3600 rin, can exhibit vibration problems which are so df=
foul to dingove. While motor speeds are relatively los om
pared with urbomachinery, the dymamies associated wth them
fan be extremely complex due to additional ring finctions
present which ae nt found ina mechanial machine. Addo
thisarotormbichisalaminated steel cylindrical coreheldasialy
tindercompresson and shrunk on a shalt aswell asa rotor cage
sh iiherenty oe andthe diel orton atn
lingnostis increases draratialy.
Mii tue that two pele (2600 rpm) motors behave the worst
when discuising mechanical performance; however, lower
Speed motors operate on the same priteples. Electromagnetic
forcing functions are generated at ll motes otor speeds, how
ever, they ae more pronounced for two ple machines die to
the greater foree between the magnetic poles (2). In addition,
twopole motorshave greater central ores and normally op-
trite much closer the fst ential speed
Does the addition of electromagnetic forces relly complicate
motor vibration diagnosis? Not in isell however. when they
te combined with the mechanical foes seen on allotting
Inachines, analysis becomes dificult, The fact that the ele
ttomagnetie foring fequencies may be very close to running
speedy or its mulipen, makes it sy to understand, why
Ahochanical and electrical engioers alike have such ifialty i
Inotor vibration diagnostics
"fo understand vibration in motors, the frst thing to re-
member is that ii als a mechanieal machine having all he
fbreing functions as any rotating mechanical machine The shaft
inst be straght, the rotor must be balanced, bearings mt be
equate, ete. Becta, varius inherent electromagnetic
foyos ens which eannot be eilted. Problems vil occur
when either the mechanical, electromagnetic, or elec:
‘vomechanical forces become excessive, which ean occur dve to
2 numberof reasons.
'A tis presetation is directed towards the mechanical en-
sincer, the prely mechanta dynamics ofa rotating system wil
nat be discussed, The eleewomagnetic and electromechencal
fspets wil be the point of concentration, Electromagnetic
forces are those which are purely magnetic crested by the oat
ing magnetic field. Elecromechanial forces are those frces
Inost commonly generated asa esalt ofan electromagnet ee
trl mechanical force, suchas unbalance or bent shal acting
incooperation with one another. ean also result om an eloe-
ttomagneti force and electrical disiymmetry (broken bars oF
Cracked end rings) lo working in concert
estromagnetic Forces
The two main electromagnetic forces in an induction motor
‘occur at 60 Hz and 120 Hz. The frequency of the main air gap
‘magnetic flux wave is 6D Hz; however, iis actually a torsional
fanetion on the rotor. Any dissymmetry in the magnet ercuit
will produce a lateral force whose frequency is at 60 Hz, This
‘components generally very small and normally ota concer.
Tnherent 120 Hz Force ~The existence of a 120 Fi force can
result primarily from bvo sources, Ttis the resul of the inherent
‘magnetic attraction between the rotor and stator acting on 25
ile point on the stator core each time it comes under the infl-
tence ofa rotating magnetic fleld poe. -
Tn one cycle of voltage, a magnetic field pole will pas this si
tionary point twice in one rotation of the magnetic feld for two
UNDERSTANDING THE VIBRATION FORCES IN INDUCTION MOTORS 6
pole motors, four times in one rotation ofthe magnetic field for
four pole motors six times for sx pole motors, et. The speed
of rotation of the magnetic field poles is exactly 60 He for to
pole motors, exactly 30 Hz for four pole motors, and exactly 20
Hi for six pole motors. Asa result, the frequency ofthe force of
attraction between the rotor and stator is 60 Hz times two for
two pole motors, 30 Hz mes four for four pole motors, and 20
He times six for six pole motors. This 120 Hz foree can, there=
fore, be defined as being a funetion ofthe speed ofthe rotating
magnetic field times the number of magneti field poles. OF
course, asthe number of poles dictate the speed ofthe rotating
magnetic field, this force as defined above, must always have &
frequency of 120 Hz and, therefore, i independent of the
number of magnetic field poles,
While itis demonstrated prviously that an inherent 120 Hz
force is present on all induetion motors, the amplitude ofthis
force is typically more pronounced on two pole motors. This is
due te the much greater distance between the poles on @ two
pole motor (180 degrees) as opposed to on slower speed
machines, 90 degrees for four pole motors, 60 degrees for six
pole motors, ete
120 Hs force due ta gap dssymmetry ~The second source
for 120 Hz vibration forces, while not inherent in the motor, gener
ally always exists de to pont of minimum air gap being present
in the motor. Ideally, the rotor should be perfetly concentric
with the stator bore, Practically, however, due to manufacturing
and assembly tolerances, this situation is impossible to achieve.
Hopefully, the maximum deviation in the airgap will not be
grester than five percent from the average (especially on hi
‘speed motors)
If its astomed that the rotor is perfectly concentric with the
Stator, the net effect ofthe magnetic flux forees in the ait gap is
entirely balanced between magnetic field pole pairs (north and
south pole}. If, however, a point of minimum air gap exists in
the motor, and a magnetic pole lines up with this point, itereates
fan area of maximum flux density and therefore the magnetic
forces between the pole pairs are unbalanced. This unbalance
creates « magnetic pull force occurring each time 2 magnetic
field pole passes the point of maximum flux density. It can,
therefore, be stated that this 120 Hz foree due to airgap dissym-
metry is also defined as a function of the speed ofthe rotating
magnetic field times the number of poles. As vas the ease for
the inherent 120 Hz force, the fequency of the airgap dissym-
retry force is independent of the number of pales and occurs
atexactly 120 Hz (3). The generation ofthe 120 H2 force due to
air gap dissymmetry is demonstrated in Figure 2
The electromagnetic forees discussed previously are depen
dent entirely on voltage and the rotating magnetic flux wave
‘his means that they exist whether the machine is running at
no load or fll load. Ie fs possible, however, that an inerease in
temperature resulting from a fll oad run, can alter the airgap
mechanically, thereby increasing the ar gap dssymmetry and
with it the 120 Hz forces from the no load runs. Its for this
reason that both afl load and no lod test are valuable when
diagnosing motor vibration problems.
Electromechanical Forces
Electromechanical forces are present on all motors to some ex
tent and are directly related tothe motor slip speed. The forees
can be generated by number of either electromagnetic or
mechanical dissymmetsies, which creates an unbalance mag-
netic pull force with a frequency of modulation. The two most
common modulating unbalance magnetic pull forces occur ata
frequency of 1) the number of poles times the slip speed, and 2)
‘one times the slip speed.
“To produce a force having a frequency of he number of poles
times the slip speed, a revolving point of minimum air gap must
Figure 2. Generation of 120 Hz Electromagnetic Force Due to
Air Gap Dissymmetry,
bbe presentinthe machine. Ducto the reasons discussed for elec-
tromagnetic forces, this miimom air gap is present on all
machines; however, its deviation from the average iswhat deter
tnines the amplitude ofthe resulting modulating force. In al
tion, besides resulting from normal manufacturing, this can
result from much more severe problems such asa bent shaft
broken rotor bars, excessive unbalance, ete. The reveling
point of minimum airgap will, as shown ia Figure 3, comes
Under the influence of maximum x density (magnet pole)
‘seein one slp eyee fora two pale motor and four ies i one
slipeyee for a our pole machine. This produces an unbalanced
magnetic pull force modulating, pulsating, or beating ata fre-
quency ofthe numberof ples times the slip speed [2
Although not as prevalent, the second most common elec-
teomechaniea forees has frequency afone times the sip speed.
For this to ccar, two dssyimmetres must occur simultaneously
between the rotor and stator. An example would be ofa rotor
which was not adequately centered radially in th stator and
‘hich also exhibits excessive unbalance. Assuming this example
{s ofa two pole motor, when a magnetic pole ines up with the
point of minimum alr gap, the mechanical unbalance is 150 de-
{ree from tis pointand therfore, the unbalance magnetic pull
will tend fo “balance” the rotor (2). The resulting force wl,
ierefore, be negligble during one halfeyele flip. Duringthe
coer half eyele, the magnet pul willie uy withthe anba
70 PROCEEDINGS OF THE NINETEENTH TURBOMACHINERY SYMPOSIUM
Figure 3. Demonstration of Electromechantcal Force with a Fre-
‘quency of the Number of Poles Times Sip Speed.
lance amplifying the unbalanced magnetic pull force, Therefore,
the resulting modulating force will occur once in one cycle of
slip. This situation is demonstrated in Figure 4
‘While it is also possible for this to occur on slower speed
‘motors, a one times slip frequency force is much more dificult
to produce. As seen in Figure 4, for the four pole motor, a pro-
nounced force occurs when the unbalance force lines up withthe
tunbalaneed magnetic pull force ereated by the point of
‘minimum air gap. In addition, a force is created each time the
‘unbalance force comes under the influence of a magnetic pole
except then the pole is 180 degrees from the point of minimum
airgap. This, in efect, also creates an unbalanced magnetic pull
force; but, itis not as great as when the unbslance lines up di=
rectly with the pole. Because of this, the unbalanced magnetic
pull force will have a tendeney to modulate atone times slip fre-
‘queey. As this foreing function has yet to be seen on slower
speed machines, it should not be of a concer.
Rither of the electromechanical forces previously described
above would be superimposed on any of the vibration compo
nents whether it be the unfiltered or filtered values. The result
‘would be that particular vibration component modulating at ei
ther one times slip speed or the number of poles times slip
speed. Is important to remember that slip frequency related
‘unbalance magnetic pull force is always present; however, it
Figure 4. Demonstration of Electromechanical Force Having a
Frequency One Times the Slip Speed.
should not be excessive. The amplitude of modulation should
tot be above 20 fo 95 percent. TFA is, amore severe diy
‘ety is present, mst tly det sloppy machining or exces
Sve tletnces during motor assembly. Celtel probs such
fr broken rotor bars, end rng cracks or bent shale exhibit the
Stmne modulation characteristics, therefore all exeessive mode
lation must be vetted
‘A common mcrooepton i tha these unbalance magne
pull ces exist only when the machine operating atl oad
fr closet fall load. Ths is probably due tothe at tat one an
hear an audible best fallload while nothearing one at no oad.
The unbalance magnetic pul fre wl not exsta no load ifthe
dissymmetry is lal elated suchas. broken rotor br ov ther-
mal bows however, i itt from sloppy manufacturing tech
niques the frees exist even a no load
Since the unbalance magnetic pul is dependent upon slip,
and as described inthe baste theory section ofthis pope, pis
present even ao load, it makes nse that those modulation
forcescan leo estate load, At no Toad, however, he slip and,
therefore, the forcing frequency is very low Typiel no load sip
Sequence are between 0.001 Hz and 0.000 He (0.08 span
O38 rpm) whereas, flload ip vals typical range between
0125 Ft 0.5 He (iS pn to 0 rom). As avesul, doningno load
operation the time forthe revolving pent at minimum at gap
UNDERSTANDING THE VIBRATION FORCES IN INDUCTION MOTORS a
tocome under then lence of maximom x density wl be ap-
Pepi et vente is, However ds
Gad operation, this time is only between to and our second!
Tis this reason, extremely low Bequetey hata beat cannot
be heard at no load.
tis, therefore, possible to ascertain the slip frequency mod-
ulated electromectonial ores during anoload ras by monitor
Inge vibration component contnuowly for op to approinately
IBrminues, In ado, the ne load tip Speed an bs deter
inne by aiming a strobe igh et at nat 60 He fr tvopae
motors esaclly 90 zor four pole motor, ete, atthe shah end
teyway, One can then se the keynay start to lag behind the
strobe very slowly. The time required for the keyway to make
Se complete revlon is the no loud sip speed, An example
fusing this techiquets demonstrated in Case History Number
a
Formodulation forces to be eliminated, a perfectly symmetsi=
cal machine, both electrically and mechanically would have to
be manufactured. As this is not possible, the motor should be
sade as symmetrical as tolerances allow,
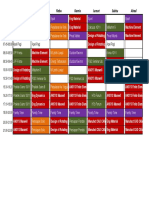
‘The vibration troubleshooting chart presented in Table 1
should be beneficial when motor vibration problems occur. It
covers most of the common occurrences in a simplified way;
however, because ofthe multitude of electrical and mechanical
factors which may precipitate a vibration problem, itis often
‘necessary to perform a basic analysis based on fundamental con-
‘cepts, most of whieh axe discussed herein. Since not all combi-
rations of electrical and mechanical problems can ever be
‘ccounted for, tis very important to understand the natare,
‘origin, and behavior ofthe forees discussed here,
‘able 1, Vibretion Symptoms and Causes for Squirrel Cage Induction Motors.
—
2 PROCEEDINGS OF THE NINETEENTH TURBOMACHINERY SYMPOSIUM
CONCLUSIONS
While squirrel cage induction motors have been used wide
spread in industry for over 50 years, it appears that the recent
trend in long term reliability on major machines has now been
instituted on motors, As aresult, users are evaluating motors ia
the same manner they evaluate higher speed compressors’ and
turbines’ mechanteal performance. Inthe purchasing stage itis,
{important to recognize that stringent specifications alone do not
‘uarantee a well running and reliable machine. A thorough un-
derstanding of induction motors must be known and employed
when making up job specifications. The following aspects of
‘motor procuremeat should be followed in order to assure the
user ofa well running and reliable motor
* Write detailed motor specifications which rely on standards
already published, ifapplicable to the motor application. Keep
jn mind that vibration and manufacturing tolerances do nothave
to be overly stringent for a good operating machine, Also, re-
‘member that a motor is a“completely different animal” from a
turbine or compressor and, therefore, not al requirements can
be interchanged
‘Submit the job specifications to motor vendors for com-
‘ments, Qualify Various motor manufacturers to ascertain their
manuficturing, quality control and testing capabilites,
* Contact other users of identical motors to learn oftheir ex-
periences. Judgement has to be made here since a particular
‘machine can be either the “greatest” or a “piece of junk,” de-
pending upon who is talking, It helps to have a specific list of
uestions available and make certain that all failures are filly
explained to determine responsibility
* Evaluate the motor bids from a technical and an economle
standpoint. Know the various manufacturers’ major design fea-
tures and drawbacks,
+ A comprehensive design review should be made as soon as|
the initial electrical and mechanical designs are finalized. Ifpos-
sible, erosscheck the motor starting characteristics and the lat-
tral critical speed analysis, Get satisfactory explanations on sige
ailficant deviations between results.
* Develop a complete and comprehensive shop inspection
and witness test plan. It is most important to uulize qualiied in-
spectors knowledgeable in motor manufacturing and eonstruc-
tion. Witness agents must be knowledgeable in motor design,
and electrical and mechanical testing. It is easy to understand
that more than one person maybe required to satisfactorily com-
plete the inspection and witness testing
Tn order to understand the vibration forces within a motor, &
{s important thatthe baste operating principles of motor theory
be known. Vibration forces in motors can be of three pes:
‘mechanical, electromagnetic, or electromechanical, As this pre
sentation is geared towards the mechanical engineer, only the
latter two cases were reviewed, Eleetromagnetie vibration con-
sists of 0 He (line frequency) and 120 Hz (twice line frequency)
forees. Electromechanical forees consist of a unbalanced mag:
netic pul force working in combination withan electromagnetic
force so thatthe resulting vibration is mediulating ata frequency
in relation to slip speed,
Lastly, five actual case histories of motors exhibiting various
vibration problems are presented. Each case is detailed in terms
‘ofthe troubleshooting and corrections necessary which resulted
in well running machine
FIVE CASE HISTORIES
+ Rotor bar breakage on « compressor driver
+ Rotor Thermal bow due to smeared laminations
* Stator core 120 H2 vibration transmitted to shaft and bear
ing housings
‘* Demonstration of non linear damping of il flm
+ Demonstration of vibration modulation at one times slip
speed
Case History 1
‘Three identical 1250 hp, 6900 Volt, 3600 rpm, induction
motors were placed in service in 1978 at a waste water eoncen-
trator plant for a utility company. The units were driving vapor
compressors having a connected load inertia of four times the
Listed “allowable NEMA WK? to accelerate without injurious
temperature rise.” Over the next ve years, numerous oto fall
lures occurred on all three motors, with atleast two failures per
tunit. Each time, the rotor was repaired and placed back into
‘Vibration measurements were subsequently recorded on one
of the repaired motors after it had been in service for two
‘months, Maximum unfiltered vibration levels on the bearing
housing modulated between 1.6 and 3.4 mils. The frequency of
the modulation was determined to be twice sip frequency with
avery strong twice line frequency vibration component of 0.90
Ips which was also modulating at twice slip frequency (Figure
5). A higher harmonic of bar passing frequency was also noted
inthe unfiltered valu.
igure 5. Opposite Drive End Bearing Housing Horizontal Vio-
ration a5 Measured by Accelerometer.
‘The following month, the motor was shut down and trans:
ported to a service shop for inspection and repair. When the
‘olor vas pullel from the stator, numerous cracks were noted
the end ring and rotor bar to end tng joints (Figures 6 and 7).
Adationally, the rotor eage was extremely loose, such that the
service shop started to swage the bars at an attempt to tighten
the rotor cage (Figure 8). Reportedly, this had been the exact
condition ofall the rotors whieh had previously filed. Work was
stopped when it was decided that an analysis and assessment of
{his poblem should be performes
‘Areview of the rotor design was mide, and itwas discovered
that to compensate for the lose cage, the manufacture utilized
‘a halance/support ring assembly: Tis assembly oras bolted to
the end ving and the ID was then shrunk tothe shad, thereby
containing the radial looseness ofthe rotor cage. Across section
ofthe rotor construction s shown is Figure. Restraining aloose
iom is arcpable on «mechanical machine, however, on
electceal machine, certain electrical and thermal paramnetors
were neglected m
"Bach ne a motor fs started, a large current flows inthe rotor
bars and end ring, Theheat generated ducingthis statis almost
UNDERSTANDING THE VIBRATION
Figure 6. View of Crack n Rotor End Ring after Motor was Dis-
assembled at Sereice Shop.
Figure 7. Crack in Fotor Bar to End Ring Braze,
equal tothe amount of energy imparted to the rotating system.
‘This heat, of couse, is greater when accelerating high inertia.
Toads such as this, The temperature rise of the bars and end ving
results in an axial growth of the bass pushing the end ring assem:
bes away from the rotor core. Stresses are created due to cen:
trifugal forwes acting on the end ring and bars along with temper
ature gradients on the bars due to skin effect. These factors
create bending stresses at the bar protrusion section and at the
FORCES IN INDUCTION MOTORS 3
Figure 8. Service Shop Worker Attempting to Tighten Rotor
Cage hy Swaging Rotor Bars. Swaging isthe act of mechanically
displacing bar material in a manner such that st becomes tighter
inthe slot
= Te,
Figure 9. Original Rotor Cross Section Showing Balance Ring!
Support Ring Assembly,
brazed bar joints to the end rings. For these reasons, itis impor
tant to allow an unrestrained and predictable aal growth of the
rotor bars. The end ring balance/suppor xingassembly the man
tfacturer utilized on this machine may have avoided a valance
problem; however, it didnot allow forthe design considerations
{ust mentioned.
Once this problem wasidentified, the motor manufacturer de
signed and assembled new rots utilizing a tight cage, larger
cn PROCEEDINGS OF THE NINETEENTH TURBOMACHINERY SYMPOSIUM
‘end rings for the high inertia starting, and a balance ring which,
was allowed to slide on the shaft. Problems have not been re-
ported on these machines since.
Case History 2
During acceptance testing ofa 1500 hp, 2600 rpm motor, no
Joad coupled vibration evelsona dynamometer stand were very
low, Maximum unflkeed levels of 0.80 mils on the shaft and
0.25 mils on the bearing housing were measured. When the
‘motor was placed under load, the corresponding vibration level,
spadually increased over afr hour period and stabilized at wn-
filtered levels of 5 mls onthe shat and 0.78 mils onthe bear
ing housing. Filtered rotational speed vibration levels showed
approximately the same increase in shaft vibration and a comes:
‘ponding phase angle change of almost 180 degrees
‘Even though the measurements exhibted casi signs of a
rotor thermal instability (Bow), the manufacturer stated that the
Uibration acceptance ertera of 2.0 ms had not been goaren-
teed under loaded conditions. They fel that since the motor vi
bration was below 2.0 mils under no load, the motor was accept
able, During initial discussions, they stated that this condition
‘was the result of vibration influence from their dynomometer;
however, this was disproved from a review of the vibration
spectra which clearly confirmed orginal suspicions ofa thermal
bow.
‘The rotor was disassembled fiom the stator and inspected
‘ety thoroughly As discussed earlier, the rotor core is made up
‘of thousands of cylindrical laminated steel sheets held in com-
pression axially and shrunk onto the shaft, Each ofthese lani-
hated sheots are insulated from one another in order to limit
Totor surface eddy current loses and thereby reducing stray
Joad losses. Since the laminated core is placed onthe shaft, itis
effectively shorted tthe core ID. Local currents cannot flow un-
Tessa short oceurs at diferent radial location, most often atthe
core OD. One method oflaminatio shorting atthe core OD can
tome fiom excessive burs touching one anther or piercing the
coreplate ofan adjacent lamination,
“An inspection ofthis rotors core OD, as viewed under a mag-
nifying glass, showed areas ofthe rotor with smeared lamina
tions over approximately 30 percent ofthe core surface. In these
reas, localized eddy currents were cvevlated, thereby increas
ing the rotor surface temperatures nonuniformly and resulting
ina thennal bw. ince the surface losses increase with sip, the
fptor did not bow until the machine was loaded, when the nor
face eddy cursents were highest. The smearing of laminations
was caused by a dul lathe cutting too, which was subsequently
‘comected. The entte rotor OD wasthen turned down tolesser
diameter and the motor then reassembled. Whea the vibration
‘vas agun measured with the machine under lod, levels dd act
Increase by more than 10 percent over the cet duration, while
the phase angles didnot change more than 10 degrees over a
four hour test -
"The vibration data shown in Figure 10 was vecorded both be-
fore and after the repair procedures.
Case History 3
‘AG00hp, 2300 Volt, NEMA 5000 fame motor was experiencing,
very high vibration, modulating st two times the slip frequency
fon both bearing housings and all shaft probes. Additionally, the
‘sce line frequeney vibration component was predominant and
was also modulating at two times slip frequency.
Tis important to note that twice lin frequency vibration is
present on all induction motors no matter how many poles. On
‘avo pole motor suchas ths, it inherently results from the rotat-
ing magneti field passing a single point ofthe stator twice in
‘one voltage eyele (sine wave). The resulting stator and rotor at=
traction forces are independent of the voltage pola
oor ZNSE RGR bra ener
7 AL
Figure 10. Vibration Data Recorded Both Before and After Re-
pairs
fore, the magnet force oceurs at exactly vice line frequency,
A the stator core is the primary forcing function, the decision
‘was made to isolate it from the bearing housir
“The frame construction was afatly standard cast frame which
is line bored to aecept the stalor core (Figure Il). In order to
maintain close sir gap tolerances, ribs on the frame ID are boved
cconeentrie with the end dell rabbit fits, In this machine, there
‘wore six ribs into which the stator core and winding were
shrunk. As these 1ibs extend along the entire axial length ofthe
frame, the core vibration easly transmits tothe end ofthe frame
‘which suppests the bearing housing, To isolate the core vibra-
tion, notches were machined into the ribs as shown,
fz NL
Figure Il. Cost 500 Frame Showing the Ribs in Which the Stator
Gore is Placed. To limit the transmission ofthe 120 Hz vibration
from the stator core, each of the si ribs were notched as shown
‘in the cross section. This tends to isolate the core from the end
frame to which the bearing housings are mounted.
When the motor was assembled, the twice ine frequency vi-
bration was lower; however, the excessive modulation was stil
present. Only when anothes frame was modified was the cause
Identified and corrected which resulted in reduced vibration
levels. Itwas discovered that in addition tothe 120 Haz vibration
problem, the original frame was improperly bored so that it was
deflecting excessively in one direction simulating an out of
round stator. The maximum shaft vibration is shown in Figure
12 both before and ater the modifications tothe frame.
UNDERSTANDING THE VIBRATION FORCES IN INDUCTION MOTORS B
SS
igure 12. Plot Showing Instantaneous Peak to Peak Shaft Vibra-
tion Levels Modulating at 2X the Slip Speed During a No Load
Slip Cyele.
Case History 4
‘Atwo pole, 1250 hp motor had undergone vibration testing
2% the motor manufacturers plat without any problems. Unf
tered vibration levels reached a maxim of 1-18 mils on the
shal and 0.50 mils onthe bearing housing during the fll losd
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Goldstein R J Fluid Mechanics MeasurementsDocument1 pageGoldstein R J Fluid Mechanics MeasurementsAnonymous hWj4HKIDOFNo ratings yet
- Schedule PlanDocument3 pagesSchedule PlanAnonymous hWj4HKIDOFNo ratings yet
- Jadwal Juli - Oktober 2016 HarianDocument1 pageJadwal Juli - Oktober 2016 HarianAnonymous hWj4HKIDOFNo ratings yet
- Tedy Kuswara: A StorytellerDocument1 pageTedy Kuswara: A StorytellerAnonymous hWj4HKIDOFNo ratings yet
- Departemen TsaqofahDocument9 pagesDepartemen TsaqofahAnonymous hWj4HKIDOFNo ratings yet
- LulusDocument2 pagesLulusAnonymous hWj4HKIDOFNo ratings yet
- Jadwal Persiapan S2 v2Document1 pageJadwal Persiapan S2 v2Anonymous hWj4HKIDOFNo ratings yet
- The Speed of Trust: Based On The Book by Stephen MR CoveyDocument34 pagesThe Speed of Trust: Based On The Book by Stephen MR CoveyAnonymous hWj4HKIDOF100% (1)
- 5716159Document34 pages5716159Anonymous hWj4HKIDOFNo ratings yet
- Rundown Diklat Guru Nasional 2013 PrintDocument5 pagesRundown Diklat Guru Nasional 2013 PrintAnonymous hWj4HKIDOFNo ratings yet
- 0000 Design by Optimization of An Axial-Flux Permanent-Magnet Synchronous MotorDocument5 pages0000 Design by Optimization of An Axial-Flux Permanent-Magnet Synchronous MotorAnonymous hWj4HKIDOF100% (1)
- Makalah Lib - Agama.docx WokeDocument6 pagesMakalah Lib - Agama.docx WokeAnonymous hWj4HKIDOFNo ratings yet
- Chapter 2 - Macromechanical Analysis of A Lamina Exercise SetDocument12 pagesChapter 2 - Macromechanical Analysis of A Lamina Exercise SetAnonymous hWj4HKIDOFNo ratings yet
- 3241 Lecture 2Document8 pages3241 Lecture 2Anonymous hWj4HKIDOFNo ratings yet