Download as pdf or txt
You might also like
- Drager Evita 4,2dura Ventilator - Error Code Manual PDFDocument171 pagesDrager Evita 4,2dura Ventilator - Error Code Manual PDFDron80% (5)
- Doing Business in KurdistanDocument114 pagesDoing Business in KurdistanayadmanNo ratings yet
- Ss QuetionsDocument7 pagesSs QuetionsSalai Kishwar JahanNo ratings yet
- EEE324 Digital Signal Processing: Course ObjectivesDocument17 pagesEEE324 Digital Signal Processing: Course ObjectivesBasir MustafaNo ratings yet
- Module-3 System Classification and Analysis Objective: To Understand The Concept of Systems, Classification, Signal Transmission ThroughDocument27 pagesModule-3 System Classification and Analysis Objective: To Understand The Concept of Systems, Classification, Signal Transmission ThroughMehul MayankNo ratings yet
- Ae2235 Topic I 5 2020Document47 pagesAe2235 Topic I 5 2020che cheNo ratings yet
- EGR214B1 19 16LSp1Document19 pagesEGR214B1 19 16LSp1sultanNo ratings yet
- Lecture 8: Convolution: Continuous Time SystemDocument3 pagesLecture 8: Convolution: Continuous Time SystemVijay V RaoNo ratings yet
- Assignment of Signals and SystemDocument3 pagesAssignment of Signals and SystemNitish Kumar YadavNo ratings yet
- Introduction To Signals & Variables Lecture-3Document14 pagesIntroduction To Signals & Variables Lecture-3seltyNo ratings yet
- Impulse Response FunctionsDocument12 pagesImpulse Response Functionsharisraja47985No ratings yet
- S and S Examination PaperDocument3 pagesS and S Examination Paperzeeshanahmad12030No ratings yet
- Lecture03 (Math Rep1)Document73 pagesLecture03 (Math Rep1)kajela25No ratings yet
- Lecture 5&6Document45 pagesLecture 5&6ramadanNo ratings yet
- Bio Sig Pro NotesDocument83 pagesBio Sig Pro Notesisma807No ratings yet
- ELE 301: Signals and Systems: Prof. Paul CuffDocument28 pagesELE 301: Signals and Systems: Prof. Paul CuffcartamenesNo ratings yet
- Unit 1Document69 pagesUnit 1SivaKumar AnandanNo ratings yet
- Systems ClassDocument53 pagesSystems ClassBhetariya PareshNo ratings yet
- Ece IV Signals & Systems (10ec44) AssignmentDocument14 pagesEce IV Signals & Systems (10ec44) AssignmentBlackArmy880% (1)
- Digital Signal Processing 2marks 1.what Is A Continuous and Discrete Time Signal?Document29 pagesDigital Signal Processing 2marks 1.what Is A Continuous and Discrete Time Signal?Jeyakumar VenugopalNo ratings yet
- Signal ProcessingDocument275 pagesSignal ProcessingBruno Martins100% (1)
- Chapter 2Document20 pagesChapter 2Fahad AbdullahNo ratings yet
- 3 Discrete Time SystemsDocument40 pages3 Discrete Time SystemsNur Razanah Mohd YasinNo ratings yet
- L3 LTI SystemsDocument28 pagesL3 LTI SystemsAnshuman PandeyNo ratings yet
- Ss EXPECTEDDocument8 pagesSs EXPECTEDANOOP GUPTANo ratings yet
- Signal&Systems Review StudySetDocument3 pagesSignal&Systems Review StudySetIreth OronarNo ratings yet
- PART III: Biomedical Signal Processing: An IntroductionDocument83 pagesPART III: Biomedical Signal Processing: An Introductionpravin2275767No ratings yet
- EE-232 Signals and Systems: Output of LTI Systems To Basic Signals Frequency Domain Characterization (Plotting)Document32 pagesEE-232 Signals and Systems: Output of LTI Systems To Basic Signals Frequency Domain Characterization (Plotting)FahdNo ratings yet
- Chapter 2 SystemDocument8 pagesChapter 2 Systemعظات روحيةNo ratings yet
- Sas SeriesDocument8 pagesSas SerieskganesharunNo ratings yet
- 5 Units Question Bank - RejinpaulDocument6 pages5 Units Question Bank - RejinpaulHemalatha NatarajanNo ratings yet
- Chapter 2 AgaDocument22 pagesChapter 2 AgaNina AmeduNo ratings yet
- Ec010403 Signals and Systems Questionbank PDFDocument16 pagesEc010403 Signals and Systems Questionbank PDFSriju RajanNo ratings yet
- Control - Linear System Theory1Document178 pagesControl - Linear System Theory1Amruth ThelkarNo ratings yet
- DSP-Lec 2Document28 pagesDSP-Lec 2ngmaherNo ratings yet
- CH 2 System and PropertiesDocument99 pagesCH 2 System and PropertiesPUSPA JOSHINo ratings yet
- Digital Signal Processing: 2 Marks & Question-AnswersDocument30 pagesDigital Signal Processing: 2 Marks & Question-AnswerssridharanchandranNo ratings yet
- Chapter 4 - Time-Domain Analysis of Control Systems-Update 1Document26 pagesChapter 4 - Time-Domain Analysis of Control Systems-Update 1Trương Mỹ DuyênNo ratings yet
- Lecture 7 - Systems & Laplace Transform (Slides)Document20 pagesLecture 7 - Systems & Laplace Transform (Slides)Buddhadev GhoshNo ratings yet
- DSP Qs 2marksDocument36 pagesDSP Qs 2marksanon_624151290No ratings yet
- Digital Signal Processing: Dr. MuayadDocument11 pagesDigital Signal Processing: Dr. MuayadAli KareemNo ratings yet
- LECTURE 4 Sytetms ClassificationDocument42 pagesLECTURE 4 Sytetms ClassificationEzzadin AbdowahabNo ratings yet
- DSP Sorted Bits (TheWebEagles)Document3 pagesDSP Sorted Bits (TheWebEagles)Dinesh KumarNo ratings yet
- Ss Model 2 2016 - SchemeDocument2 pagesSs Model 2 2016 - SchemeKaustubha ShahNo ratings yet
- CH 3fourier Series of Periodic Signals S196Document96 pagesCH 3fourier Series of Periodic Signals S196ankitkamanalli230No ratings yet
- 218 - EC8352, EC6303 Signals and Systems - 2 Marks With Answers 2Document26 pages218 - EC8352, EC6303 Signals and Systems - 2 Marks With Answers 2anakn803No ratings yet
- Unit Iv: Continuous and Discrete Time SystemsDocument32 pagesUnit Iv: Continuous and Discrete Time SystemsAnbazhagan SelvanathanNo ratings yet
- Ni Two Marks - NewDocument37 pagesNi Two Marks - NewAnuishuya SugumaranNo ratings yet
- Assignment 2Document5 pagesAssignment 2Aarav 127No ratings yet
- 2024 ELEC3004 Problem Set 1Document4 pages2024 ELEC3004 Problem Set 1songpengyuan123No ratings yet
- Signals and Systems: Lecture #2: Introduction To SystemsDocument8 pagesSignals and Systems: Lecture #2: Introduction To Systemsking_hhhNo ratings yet
- Linear System Theory and Design: Taesam KangDocument42 pagesLinear System Theory and Design: Taesam KangFiriceNguyenNo ratings yet
- Signals & SystemsDocument55 pagesSignals & SystemsWaqas Akram GondalNo ratings yet
- 6243 Spring 2008Document153 pages6243 Spring 2008combatps1No ratings yet
- ECE438 - Laboratory 2: Discrete-Time SystemsDocument6 pagesECE438 - Laboratory 2: Discrete-Time SystemsMusie WeldayNo ratings yet
- Linear Time-Invariant SystemsDocument30 pagesLinear Time-Invariant SystemsJoseph IbrahimNo ratings yet
- 22EC44 SS Final QBDocument7 pages22EC44 SS Final QBpunitkudari5600No ratings yet
- Signals and SystemsDocument22 pagesSignals and Systemsvnrao61No ratings yet
- Try To Refer Ramesh Babu Book 1Document11 pagesTry To Refer Ramesh Babu Book 1sukeshsrkNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- TelkomnikaDocument6 pagesTelkomnikaayadmanNo ratings yet
- Huawie Batt DSDocument14 pagesHuawie Batt DSayadmanNo ratings yet
- EE227-Final ExamDocument1 pageEE227-Final ExamayadmanNo ratings yet
- Solar PV Site Survey Format and ParameteDocument4 pagesSolar PV Site Survey Format and ParameteayadmanNo ratings yet
- New ProjectDocument9 pagesNew ProjectayadmanNo ratings yet
- Boq of Kirkuk Optical Fiber ProjectDocument1 pageBoq of Kirkuk Optical Fiber ProjectayadmanNo ratings yet
- EE227-Final Exam-FeildsDocument1 pageEE227-Final Exam-FeildsayadmanNo ratings yet
- Solid State TechnologyDocument1 pageSolid State TechnologyayadmanNo ratings yet
- UntitledDocument1 pageUntitledayadmanNo ratings yet
- UntitledDocument1 pageUntitledayadmanNo ratings yet
- مسائل محركات DCDocument17 pagesمسائل محركات DCayadmanNo ratings yet
- Scanned With CamscannerDocument47 pagesScanned With CamscannerayadmanNo ratings yet
- Simple Detection Schemes For The Alamouti Code Assisted V-BLAST (ACAV) SystemDocument6 pagesSimple Detection Schemes For The Alamouti Code Assisted V-BLAST (ACAV) SystemayadmanNo ratings yet
- Guidelines For The First Part of The Literature Review ProjectDocument7 pagesGuidelines For The First Part of The Literature Review ProjectayadmanNo ratings yet
- Chapter-One: Signal and Systems 1. SignalsDocument437 pagesChapter-One: Signal and Systems 1. SignalsayadmanNo ratings yet
- Internet of Things (Iot) : A Survey On Architecture, Enabling Technologies, Applications and ChallengesDocument12 pagesInternet of Things (Iot) : A Survey On Architecture, Enabling Technologies, Applications and ChallengesayadmanNo ratings yet
- TMApril PDFDocument1 pageTMApril PDFayadmanNo ratings yet
- ESSRP ESMF FinalDocument133 pagesESSRP ESMF FinalayadmanNo ratings yet
- Occupational Safety and Health Management and Contaminated Sites WorkDocument45 pagesOccupational Safety and Health Management and Contaminated Sites WorkayadmanNo ratings yet
- Oh&S Management System Checklist - As 4801:2001: 4.2 OHS PolicyDocument5 pagesOh&S Management System Checklist - As 4801:2001: 4.2 OHS PolicyayadmanNo ratings yet
- Computers & Security: Omnia Abu Waraga, Meriem Bettayeb, Qassim Nasir, Manar Abu TalibDocument17 pagesComputers & Security: Omnia Abu Waraga, Meriem Bettayeb, Qassim Nasir, Manar Abu TalibayadmanNo ratings yet
- Combined Envelope Scaling With Modified SLM Method For PAPR Reduction in OFDM-Based VLC SystemsDocument6 pagesCombined Envelope Scaling With Modified SLM Method For PAPR Reduction in OFDM-Based VLC SystemsayadmanNo ratings yet
- Triax Head EndsDocument24 pagesTriax Head EndsPRaoNo ratings yet
- Lecture3 PDFDocument12 pagesLecture3 PDFYogi AldinoNo ratings yet
- SMD PackagesDocument6 pagesSMD PackagesCarlos ChuekeNo ratings yet
- Prospect FX 8322Document6 pagesProspect FX 8322Calin PopaNo ratings yet
- Types of Electrical Test EquipmentDocument3 pagesTypes of Electrical Test EquipmentreynaldojapsonNo ratings yet
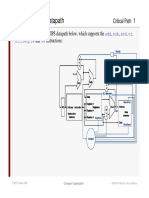
- Simplified MIPS Datapath: Add Sub and or SLT Beq LW SWDocument8 pagesSimplified MIPS Datapath: Add Sub and or SLT Beq LW SWTrần Thảo NguyênNo ratings yet
- KAI 11000 LongSpecDocument46 pagesKAI 11000 LongSpecmyselfandmeNo ratings yet
- Toshiba - 43L621U 15-0970 WEB V1 en Final LRDocument105 pagesToshiba - 43L621U 15-0970 WEB V1 en Final LRAtreyu BosleyNo ratings yet
- 1 MOS TransistorDocument49 pages1 MOS TransistorRookhsar RazaNo ratings yet
- Lenovo D22e-20 Datasheet - ENDocument2 pagesLenovo D22e-20 Datasheet - ENJohn TeeNo ratings yet
- Smart Blind Stick Project Using Arduino and SensorsDocument11 pagesSmart Blind Stick Project Using Arduino and SensorsdewasuryantoNo ratings yet
- Anritsu - VNA - Understanding VNA CalibrationDocument36 pagesAnritsu - VNA - Understanding VNA CalibrationScribdFgNo ratings yet
- Week 1Document20 pagesWeek 1Josh ReyesNo ratings yet
- HP Elitedesk 800 G1 Desktop Mini Business PC: Fits Here, There, Almost EverywhereDocument4 pagesHP Elitedesk 800 G1 Desktop Mini Business PC: Fits Here, There, Almost EverywhereJuan Osio PNo ratings yet
- Scan Through TAPDocument10 pagesScan Through TAPajayg_lmgNo ratings yet
- Group 4: Diagnosis and Identification of Faulty SystemDocument35 pagesGroup 4: Diagnosis and Identification of Faulty SystemPrecious GamerNo ratings yet
- RA - 29165 DBET 5xDocument10 pagesRA - 29165 DBET 5xrafarodrig6No ratings yet
- Iopass-Door-Controller Ds r03 LT enDocument2 pagesIopass-Door-Controller Ds r03 LT engroovey9040No ratings yet
- Inam BEET 4833 CHP1-a-INTRODUCTION AND FINDAMENTALS OF ANTENNADocument25 pagesInam BEET 4833 CHP1-a-INTRODUCTION AND FINDAMENTALS OF ANTENNAKishen KunalanNo ratings yet
- A Suppressing Method For Spur Caused by Amplitude Quantization in DDSDocument8 pagesA Suppressing Method For Spur Caused by Amplitude Quantization in DDSKit CornNo ratings yet
- Assignment 1Document5 pagesAssignment 1Ruvenderan SuburamaniamNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological Universityhemang.pandya.dec20.gecmNo ratings yet
- Bang Gia LK (1) - DTDocument22 pagesBang Gia LK (1) - DTTri Nang HuynhNo ratings yet
- Amateur Radio 12 December 1967Document132 pagesAmateur Radio 12 December 1967Salem Mohand Ben MohamedNo ratings yet
- FT 897D Technical SupplementDocument125 pagesFT 897D Technical SupplementPxistaNo ratings yet
- Acer LCD Monitor P223WDocument26 pagesAcer LCD Monitor P223WAnonymous j5apk2AumNo ratings yet
- Cyclone V Device Handbook Volume 2 TransceiversDocument171 pagesCyclone V Device Handbook Volume 2 TransceiversMaximiliano NietoNo ratings yet
- Foto Ups 100 Kva Dak 2021Document5 pagesFoto Ups 100 Kva Dak 2021myrnaganiNo ratings yet
- ARM7,9,11 ProcessorDocument34 pagesARM7,9,11 Processorharshad lokhandeNo ratings yet