
Pid Arduino Uno
Pid Arduino Uno
You might also like
- Update SCD - SQLDocument5 pagesUpdate SCD - SQLJacek Adamowicz0% (1)
- Raport: Lucrarea de Laborator nr.4 La Disciplina POODocument7 pagesRaport: Lucrarea de Laborator nr.4 La Disciplina POOVlada SofiaNo ratings yet
- Din 20 - 09 - 2021 - Orar - General - ClaseDocument20 pagesDin 20 - 09 - 2021 - Orar - General - Claseiustina matei17100% (1)
- Andrica TopanDocument161 pagesAndrica TopanIon popescu50% (2)
- Exercises: Entity Relations: 1. Student SystemDocument4 pagesExercises: Entity Relations: 1. Student SystemTodor TsankovNo ratings yet
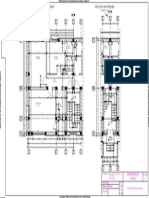
- Plan Etaj Curent Detaliu de Intrare A: SCARA 1:50 SCARA 1:50Document1 pagePlan Etaj Curent Detaliu de Intrare A: SCARA 1:50 SCARA 1:50Marius StoicaNo ratings yet
- Advanced Algorithms Quiz 3Document2 pagesAdvanced Algorithms Quiz 3mathuNo ratings yet
- Motorola TETRA MTH800 Basic User Guide enDocument218 pagesMotorola TETRA MTH800 Basic User Guide enForum PompieriiNo ratings yet
- The Insider's View - Memoirs of A Public Servant - Javid ChowdhuryDocument186 pagesThe Insider's View - Memoirs of A Public Servant - Javid Chowdhuryprabhat92% (12)
- 14 Dynamics SolutionDocument12 pages14 Dynamics SolutionAdrian Antonio Torres100% (2)
- The Learning Action Cell (LAC)Document15 pagesThe Learning Action Cell (LAC)Kristine Barredo75% (16)
- Examen PCLP InfopucDocument3 pagesExamen PCLP InfopucCrasmari ioanNo ratings yet
- Erdos-Mordell Inequality TADocument13 pagesErdos-Mordell Inequality TAĐặng Minh TàiNo ratings yet
- Ierarhia Pe Judet 2018Document56 pagesIerarhia Pe Judet 2018Maria CosteNo ratings yet
- Lab 1Document5 pagesLab 1Baban DavidNo ratings yet
- Tabel de Integrale NedefiniteDocument1 pageTabel de Integrale NedefiniteIoana GheorgheNo ratings yet
- Introducerea Factorilor Sub RadicalDocument2 pagesIntroducerea Factorilor Sub RadicalDiana OprescuNo ratings yet
- THE MAN WHO SOLD THE WORLD TAB (Ver 3) by Nirvana @Document2 pagesTHE MAN WHO SOLD THE WORLD TAB (Ver 3) by Nirvana @Camila MOntesNo ratings yet
- Probleme Rezolvate-Siruri de CaractereDocument7 pagesProbleme Rezolvate-Siruri de CaractereDuman AlexNo ratings yet
- BaremDocument7 pagesBaremFlorin MoldovanuNo ratings yet
- Analiza Convexa Duca DorelDocument126 pagesAnaliza Convexa Duca DorelG100% (1)
- Proiect Geometrie Computationala PDFDocument13 pagesProiect Geometrie Computationala PDFAngela BiroNo ratings yet
- Raport: Lucrarea de Laborator Nr.1Document11 pagesRaport: Lucrarea de Laborator Nr.1Iulian DecusearaNo ratings yet
- 5 TrunchiPiramidaDocument2 pages5 TrunchiPiramidaMonique TobăNo ratings yet
- Dafny TutorialDocument30 pagesDafny TutorialSumit LahiriNo ratings yet
- Kis Alexandru Lab 9Document12 pagesKis Alexandru Lab 9Sabine CrihanNo ratings yet
- Matricea DrumurilorDocument2 pagesMatricea DrumurilorcatalinalexNo ratings yet
- Probleme Rezolvate CPP Cls IX ADocument8 pagesProbleme Rezolvate CPP Cls IX AUserfromromaniaNo ratings yet
- Grila Programe DigiDocument4 pagesGrila Programe DigiDanut DanNo ratings yet
- PNCCF 2022Document4 pagesPNCCF 2022Alexandru UrzicaNo ratings yet
- An Example of A Simulation 2d Ising Model With C++ PDFDocument10 pagesAn Example of A Simulation 2d Ising Model With C++ PDFFrans Madah WauNo ratings yet
- Eye Dissection PDFDocument2 pagesEye Dissection PDFEricNo ratings yet
- 3 Calcul AlgebricDocument1 page3 Calcul AlgebricPetrișor RadaNo ratings yet
- Implementation of Linked ListDocument7 pagesImplementation of Linked Listkare jai saiNo ratings yet
- SS Lab ManualDocument48 pagesSS Lab ManualKannan RNo ratings yet
- Electronica: Cursul Nr. 1 Conf. Dr. Petru A. COTFASDocument31 pagesElectronica: Cursul Nr. 1 Conf. Dr. Petru A. COTFASAndreea Alexandra BurlacNo ratings yet
- Piramida Triunghiulara RezolvateDocument4 pagesPiramida Triunghiulara RezolvateDenis-Elena CoteaNo ratings yet
- Probleme AlgebraDocument7 pagesProbleme AlgebraMirceaSuscaNo ratings yet
- Stolz CesaroDocument4 pagesStolz CesaroNguyễn Duy QuangNo ratings yet
- Probleme RezolvateDocument28 pagesProbleme RezolvateAlex NaeNo ratings yet
- Particular General: Metode de RaţionamentDocument4 pagesParticular General: Metode de RaţionamentAleksey AlexNo ratings yet
- Operatii Cu Radicali - Cls VII - Fisa de LucruDocument1 pageOperatii Cu Radicali - Cls VII - Fisa de LucruprofraducanNo ratings yet
- Management StylesDocument5 pagesManagement StylesVarga CasianaNo ratings yet
- Proiect Didactic MatematicaDocument4 pagesProiect Didactic Matematicacosmina0196No ratings yet
- Lista Cu Site-Urile Care Conțin Resurse Online de MatematicăDocument3 pagesLista Cu Site-Urile Care Conțin Resurse Online de MatematicăAurelian RaducuNo ratings yet
- SARCINA de La Lab 6 La POODocument10 pagesSARCINA de La Lab 6 La POOAlex TronciuNo ratings yet
- C++ QuickSortDocument1 pageC++ QuickSortTaimoor Ul HassanNo ratings yet
- Exercitii-Ecuatii IrationaleDocument1 pageExercitii-Ecuatii IrationaleeuNo ratings yet
- Dell 5330dn Service ManualDocument206 pagesDell 5330dn Service ManualDeshone MarshallNo ratings yet
- Combinatorica PDFDocument7 pagesCombinatorica PDFAndreea Nico100% (1)
- Fisa de Lucru Calcule Cu Masuri de UnghiuriDocument2 pagesFisa de Lucru Calcule Cu Masuri de UnghiuriAlexandra RusuNo ratings yet
- Test Ecuații Exponențiale Și Logaritmice Clasa A X-A - Științele Naturii Realizat De, Prof. Iconaru Viorica Daniela, L. T. "M. Sebastian", BrăilaDocument3 pagesTest Ecuații Exponențiale Și Logaritmice Clasa A X-A - Științele Naturii Realizat De, Prof. Iconaru Viorica Daniela, L. T. "M. Sebastian", BrăilaIon Dumitru PetrescuNo ratings yet
- Enunturi ShortlistDocument38 pagesEnunturi ShortlistGabi PetrusNo ratings yet
- Pbinfo#3978 + AlteleDocument4 pagesPbinfo#3978 + AlteleDumitru AndraNo ratings yet
- Wildt 2023Document13 pagesWildt 2023Burtea Marius100% (1)
- GCSE Summer 2023 Final v1 2Document34 pagesGCSE Summer 2023 Final v1 2DehabNo ratings yet
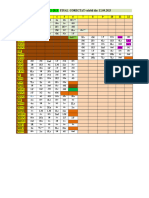
- Orar Final CORECTATDocument5 pagesOrar Final CORECTATStefania BalanNo ratings yet
- NX Nastran Error ListDocument224 pagesNX Nastran Error ListAdriana Livadariu100% (3)
- Nesbitt InequalityDocument5 pagesNesbitt InequalityYuxdar ContellNo ratings yet
- DerivateDocument3 pagesDerivateParaoanu NelaNo ratings yet
- Bagian Bang NugiDocument10 pagesBagian Bang NugiNugraha Triokta PutraNo ratings yet
- New Text DocumentDocument7 pagesNew Text Documentsubhradip.durbintechNo ratings yet
- Main CPPDocument52 pagesMain CPPNarasimha ReddyNo ratings yet
- Radc TR 90 72Document584 pagesRadc TR 90 72Shandy Canester100% (1)
- Motivational Perspectives On Student Cheating: Toward An Integrated Model of Academic DishonestyDocument19 pagesMotivational Perspectives On Student Cheating: Toward An Integrated Model of Academic DishonestyAndra ComanNo ratings yet
- Hogan 360 - John Sample EnglishDocument21 pagesHogan 360 - John Sample EnglishSivaji GandhamNo ratings yet
- CNF Lesson 3 Bio Autobio MemoirDocument18 pagesCNF Lesson 3 Bio Autobio MemoirRJ OnsanaNo ratings yet
- Basement Wall Design NotesDocument5 pagesBasement Wall Design NotesGermar PorquerinoNo ratings yet
- Process LayoutDocument32 pagesProcess LayoutMaryem Hassani100% (3)
- Subject Programme Grades 10-11Document40 pagesSubject Programme Grades 10-11Svetlana KassymovaNo ratings yet
- Lesson 2 HardwareDocument35 pagesLesson 2 HardwareJeff ErniNo ratings yet
- 9 Social Impq History Ch1 5Document4 pages9 Social Impq History Ch1 5Bhas Kar-waiNo ratings yet
- 15 - Error Message ListDocument5 pages15 - Error Message ListZak zsNo ratings yet
- WCS 8034Document8 pagesWCS 8034Sani Oghang PekanNo ratings yet
- Department of Labor: LicensedTechnologySystemContractorsDocument49 pagesDepartment of Labor: LicensedTechnologySystemContractorsUSA_DepartmentOfLaborNo ratings yet
- Lecture 1 Introduction To PolymersDocument28 pagesLecture 1 Introduction To PolymersSophieNo ratings yet
- Prestige WP QuickStart and FAQsDocument30 pagesPrestige WP QuickStart and FAQsfelixmtNo ratings yet
- Research QuestionDocument6 pagesResearch QuestionAlfian Ardhiyana PutraNo ratings yet
- Ollege of Ducation: Kolehiyo NG EdukasyonDocument40 pagesOllege of Ducation: Kolehiyo NG EdukasyonjoyNo ratings yet
- Dogra Rule: State of Jammu and Kashmir (1846-1952)Document5 pagesDogra Rule: State of Jammu and Kashmir (1846-1952)Editor IJTSRDNo ratings yet
- Bridge BearingDocument162 pagesBridge BearingKabbilawsh Peruvazhuthi100% (6)
- 19Document29 pages19Surendran RadhakrishnanNo ratings yet
- Placement RulesDocument2 pagesPlacement RulesMuhammad Aqeel DarNo ratings yet
- Political DevelopmentDocument1 pagePolitical DevelopmentViks BartsNo ratings yet
- Stern, D. The Present Moment. CH 5 The Intersubjective Matrix (75 - 96)Document24 pagesStern, D. The Present Moment. CH 5 The Intersubjective Matrix (75 - 96)kitty.5s4ssNo ratings yet
- Fitzgibbon AlgorithmDocument5 pagesFitzgibbon AlgorithmoctavinavarroNo ratings yet
- Digital Technology Essay (Marked)Document3 pagesDigital Technology Essay (Marked)MeganSouthernNo ratings yet
- Bhupathiraju Ravi SanjayvarmaDocument2 pagesBhupathiraju Ravi SanjayvarmaramyaNo ratings yet
- BPFCOY Sample ReportDocument3 pagesBPFCOY Sample ReportFinn BalorNo ratings yet




















































































Download as txt, pdf, or txt
You might also like
- Update SCD - SQLDocument5 pagesUpdate SCD - SQLJacek Adamowicz0% (1)
- Raport: Lucrarea de Laborator nr.4 La Disciplina POODocument7 pagesRaport: Lucrarea de Laborator nr.4 La Disciplina POOVlada SofiaNo ratings yet
- Din 20 - 09 - 2021 - Orar - General - ClaseDocument20 pagesDin 20 - 09 - 2021 - Orar - General - Claseiustina matei17100% (1)
- Andrica TopanDocument161 pagesAndrica TopanIon popescu50% (2)
- Exercises: Entity Relations: 1. Student SystemDocument4 pagesExercises: Entity Relations: 1. Student SystemTodor TsankovNo ratings yet
- Plan Etaj Curent Detaliu de Intrare A: SCARA 1:50 SCARA 1:50Document1 pagePlan Etaj Curent Detaliu de Intrare A: SCARA 1:50 SCARA 1:50Marius StoicaNo ratings yet
- Advanced Algorithms Quiz 3Document2 pagesAdvanced Algorithms Quiz 3mathuNo ratings yet
- Motorola TETRA MTH800 Basic User Guide enDocument218 pagesMotorola TETRA MTH800 Basic User Guide enForum PompieriiNo ratings yet
- The Insider's View - Memoirs of A Public Servant - Javid ChowdhuryDocument186 pagesThe Insider's View - Memoirs of A Public Servant - Javid Chowdhuryprabhat92% (12)
- 14 Dynamics SolutionDocument12 pages14 Dynamics SolutionAdrian Antonio Torres100% (2)
- The Learning Action Cell (LAC)Document15 pagesThe Learning Action Cell (LAC)Kristine Barredo75% (16)
- Examen PCLP InfopucDocument3 pagesExamen PCLP InfopucCrasmari ioanNo ratings yet
- Erdos-Mordell Inequality TADocument13 pagesErdos-Mordell Inequality TAĐặng Minh TàiNo ratings yet
- Ierarhia Pe Judet 2018Document56 pagesIerarhia Pe Judet 2018Maria CosteNo ratings yet
- Lab 1Document5 pagesLab 1Baban DavidNo ratings yet
- Tabel de Integrale NedefiniteDocument1 pageTabel de Integrale NedefiniteIoana GheorgheNo ratings yet
- Introducerea Factorilor Sub RadicalDocument2 pagesIntroducerea Factorilor Sub RadicalDiana OprescuNo ratings yet
- THE MAN WHO SOLD THE WORLD TAB (Ver 3) by Nirvana @Document2 pagesTHE MAN WHO SOLD THE WORLD TAB (Ver 3) by Nirvana @Camila MOntesNo ratings yet
- Probleme Rezolvate-Siruri de CaractereDocument7 pagesProbleme Rezolvate-Siruri de CaractereDuman AlexNo ratings yet
- BaremDocument7 pagesBaremFlorin MoldovanuNo ratings yet
- Analiza Convexa Duca DorelDocument126 pagesAnaliza Convexa Duca DorelG100% (1)
- Proiect Geometrie Computationala PDFDocument13 pagesProiect Geometrie Computationala PDFAngela BiroNo ratings yet
- Raport: Lucrarea de Laborator Nr.1Document11 pagesRaport: Lucrarea de Laborator Nr.1Iulian DecusearaNo ratings yet
- 5 TrunchiPiramidaDocument2 pages5 TrunchiPiramidaMonique TobăNo ratings yet
- Dafny TutorialDocument30 pagesDafny TutorialSumit LahiriNo ratings yet
- Kis Alexandru Lab 9Document12 pagesKis Alexandru Lab 9Sabine CrihanNo ratings yet
- Matricea DrumurilorDocument2 pagesMatricea DrumurilorcatalinalexNo ratings yet
- Probleme Rezolvate CPP Cls IX ADocument8 pagesProbleme Rezolvate CPP Cls IX AUserfromromaniaNo ratings yet
- Grila Programe DigiDocument4 pagesGrila Programe DigiDanut DanNo ratings yet
- PNCCF 2022Document4 pagesPNCCF 2022Alexandru UrzicaNo ratings yet
- An Example of A Simulation 2d Ising Model With C++ PDFDocument10 pagesAn Example of A Simulation 2d Ising Model With C++ PDFFrans Madah WauNo ratings yet
- Eye Dissection PDFDocument2 pagesEye Dissection PDFEricNo ratings yet
- 3 Calcul AlgebricDocument1 page3 Calcul AlgebricPetrișor RadaNo ratings yet
- Implementation of Linked ListDocument7 pagesImplementation of Linked Listkare jai saiNo ratings yet
- SS Lab ManualDocument48 pagesSS Lab ManualKannan RNo ratings yet
- Electronica: Cursul Nr. 1 Conf. Dr. Petru A. COTFASDocument31 pagesElectronica: Cursul Nr. 1 Conf. Dr. Petru A. COTFASAndreea Alexandra BurlacNo ratings yet
- Piramida Triunghiulara RezolvateDocument4 pagesPiramida Triunghiulara RezolvateDenis-Elena CoteaNo ratings yet
- Probleme AlgebraDocument7 pagesProbleme AlgebraMirceaSuscaNo ratings yet
- Stolz CesaroDocument4 pagesStolz CesaroNguyễn Duy QuangNo ratings yet
- Probleme RezolvateDocument28 pagesProbleme RezolvateAlex NaeNo ratings yet
- Particular General: Metode de RaţionamentDocument4 pagesParticular General: Metode de RaţionamentAleksey AlexNo ratings yet
- Operatii Cu Radicali - Cls VII - Fisa de LucruDocument1 pageOperatii Cu Radicali - Cls VII - Fisa de LucruprofraducanNo ratings yet
- Management StylesDocument5 pagesManagement StylesVarga CasianaNo ratings yet
- Proiect Didactic MatematicaDocument4 pagesProiect Didactic Matematicacosmina0196No ratings yet
- Lista Cu Site-Urile Care Conțin Resurse Online de MatematicăDocument3 pagesLista Cu Site-Urile Care Conțin Resurse Online de MatematicăAurelian RaducuNo ratings yet
- SARCINA de La Lab 6 La POODocument10 pagesSARCINA de La Lab 6 La POOAlex TronciuNo ratings yet
- C++ QuickSortDocument1 pageC++ QuickSortTaimoor Ul HassanNo ratings yet
- Exercitii-Ecuatii IrationaleDocument1 pageExercitii-Ecuatii IrationaleeuNo ratings yet
- Dell 5330dn Service ManualDocument206 pagesDell 5330dn Service ManualDeshone MarshallNo ratings yet
- Combinatorica PDFDocument7 pagesCombinatorica PDFAndreea Nico100% (1)
- Fisa de Lucru Calcule Cu Masuri de UnghiuriDocument2 pagesFisa de Lucru Calcule Cu Masuri de UnghiuriAlexandra RusuNo ratings yet
- Test Ecuații Exponențiale Și Logaritmice Clasa A X-A - Științele Naturii Realizat De, Prof. Iconaru Viorica Daniela, L. T. "M. Sebastian", BrăilaDocument3 pagesTest Ecuații Exponențiale Și Logaritmice Clasa A X-A - Științele Naturii Realizat De, Prof. Iconaru Viorica Daniela, L. T. "M. Sebastian", BrăilaIon Dumitru PetrescuNo ratings yet
- Enunturi ShortlistDocument38 pagesEnunturi ShortlistGabi PetrusNo ratings yet
- Pbinfo#3978 + AlteleDocument4 pagesPbinfo#3978 + AlteleDumitru AndraNo ratings yet
- Wildt 2023Document13 pagesWildt 2023Burtea Marius100% (1)
- GCSE Summer 2023 Final v1 2Document34 pagesGCSE Summer 2023 Final v1 2DehabNo ratings yet
- Orar Final CORECTATDocument5 pagesOrar Final CORECTATStefania BalanNo ratings yet
- NX Nastran Error ListDocument224 pagesNX Nastran Error ListAdriana Livadariu100% (3)
- Nesbitt InequalityDocument5 pagesNesbitt InequalityYuxdar ContellNo ratings yet
- DerivateDocument3 pagesDerivateParaoanu NelaNo ratings yet
- Bagian Bang NugiDocument10 pagesBagian Bang NugiNugraha Triokta PutraNo ratings yet
- New Text DocumentDocument7 pagesNew Text Documentsubhradip.durbintechNo ratings yet
- Main CPPDocument52 pagesMain CPPNarasimha ReddyNo ratings yet
- Radc TR 90 72Document584 pagesRadc TR 90 72Shandy Canester100% (1)
- Motivational Perspectives On Student Cheating: Toward An Integrated Model of Academic DishonestyDocument19 pagesMotivational Perspectives On Student Cheating: Toward An Integrated Model of Academic DishonestyAndra ComanNo ratings yet
- Hogan 360 - John Sample EnglishDocument21 pagesHogan 360 - John Sample EnglishSivaji GandhamNo ratings yet
- CNF Lesson 3 Bio Autobio MemoirDocument18 pagesCNF Lesson 3 Bio Autobio MemoirRJ OnsanaNo ratings yet
- Basement Wall Design NotesDocument5 pagesBasement Wall Design NotesGermar PorquerinoNo ratings yet
- Process LayoutDocument32 pagesProcess LayoutMaryem Hassani100% (3)
- Subject Programme Grades 10-11Document40 pagesSubject Programme Grades 10-11Svetlana KassymovaNo ratings yet
- Lesson 2 HardwareDocument35 pagesLesson 2 HardwareJeff ErniNo ratings yet
- 9 Social Impq History Ch1 5Document4 pages9 Social Impq History Ch1 5Bhas Kar-waiNo ratings yet
- 15 - Error Message ListDocument5 pages15 - Error Message ListZak zsNo ratings yet
- WCS 8034Document8 pagesWCS 8034Sani Oghang PekanNo ratings yet
- Department of Labor: LicensedTechnologySystemContractorsDocument49 pagesDepartment of Labor: LicensedTechnologySystemContractorsUSA_DepartmentOfLaborNo ratings yet
- Lecture 1 Introduction To PolymersDocument28 pagesLecture 1 Introduction To PolymersSophieNo ratings yet
- Prestige WP QuickStart and FAQsDocument30 pagesPrestige WP QuickStart and FAQsfelixmtNo ratings yet
- Research QuestionDocument6 pagesResearch QuestionAlfian Ardhiyana PutraNo ratings yet
- Ollege of Ducation: Kolehiyo NG EdukasyonDocument40 pagesOllege of Ducation: Kolehiyo NG EdukasyonjoyNo ratings yet
- Dogra Rule: State of Jammu and Kashmir (1846-1952)Document5 pagesDogra Rule: State of Jammu and Kashmir (1846-1952)Editor IJTSRDNo ratings yet
- Bridge BearingDocument162 pagesBridge BearingKabbilawsh Peruvazhuthi100% (6)
- 19Document29 pages19Surendran RadhakrishnanNo ratings yet
- Placement RulesDocument2 pagesPlacement RulesMuhammad Aqeel DarNo ratings yet
- Political DevelopmentDocument1 pagePolitical DevelopmentViks BartsNo ratings yet
- Stern, D. The Present Moment. CH 5 The Intersubjective Matrix (75 - 96)Document24 pagesStern, D. The Present Moment. CH 5 The Intersubjective Matrix (75 - 96)kitty.5s4ssNo ratings yet
- Fitzgibbon AlgorithmDocument5 pagesFitzgibbon AlgorithmoctavinavarroNo ratings yet
- Digital Technology Essay (Marked)Document3 pagesDigital Technology Essay (Marked)MeganSouthernNo ratings yet
- Bhupathiraju Ravi SanjayvarmaDocument2 pagesBhupathiraju Ravi SanjayvarmaramyaNo ratings yet
- BPFCOY Sample ReportDocument3 pagesBPFCOY Sample ReportFinn BalorNo ratings yet