
Ijert Ijert: "Frequency Control of Smart Grid - MATLAB/SIMULINK Approach"
Ijert Ijert: "Frequency Control of Smart Grid - MATLAB/SIMULINK Approach"
You might also like
- Manual MyLab 5 PDFDocument80 pagesManual MyLab 5 PDFÉric Scolastici100% (1)
- Digital Electronics (Betty Lincoln)Document434 pagesDigital Electronics (Betty Lincoln)Rayhan Nur AhmadiNo ratings yet
- 05IPST080Document6 pages05IPST080Niveditha NamasivaayamNo ratings yet
- Control and Operation of Grid Connected DC Source Based Distribution GenerationDocument4 pagesControl and Operation of Grid Connected DC Source Based Distribution Generationgagan mahadevaNo ratings yet
- Irjet V5i520Document5 pagesIrjet V5i520baby hNo ratings yet
- A Hybrid Smart AC DC Power SystemDocument6 pagesA Hybrid Smart AC DC Power SystemYangyadatta TripathyNo ratings yet
- Unit - 4Document21 pagesUnit - 4Shock SignalNo ratings yet
- Grid Integration of Small-Scale Photovoltaic Systems in Secondary Distribution Network-A ReviewDocument18 pagesGrid Integration of Small-Scale Photovoltaic Systems in Secondary Distribution Network-A ReviewroyNo ratings yet
- Irjet V5i8304Document5 pagesIrjet V5i8304abdulrazaq bibinuNo ratings yet
- Micro-Grid Autonomous Operation During and Subs To Islanding ProcessDocument10 pagesMicro-Grid Autonomous Operation During and Subs To Islanding Processapi-3738286No ratings yet
- Modeling of A Centralized Microgrid Protection System and Distributed Energy Resources According To IEC 61850-7-420Document8 pagesModeling of A Centralized Microgrid Protection System and Distributed Energy Resources According To IEC 61850-7-420AbhishekAnandNo ratings yet
- Lecture-8: Introduction To Smart GridDocument38 pagesLecture-8: Introduction To Smart GridSuper SpecialNo ratings yet
- Protection of Domestic Solar Photovoltaic Based Microgrid: M.P Nthontho, S.P Chowdhury, S. Winberg, S. ChowdhuryDocument6 pagesProtection of Domestic Solar Photovoltaic Based Microgrid: M.P Nthontho, S.P Chowdhury, S. Winberg, S. ChowdhuryMashood NasirNo ratings yet
- Smart Grid Communication Infrastructure: Dr. Muhammad TariqDocument49 pagesSmart Grid Communication Infrastructure: Dr. Muhammad TariqAbdul HaseebNo ratings yet
- WP-30018 SmartGridSPDs Rev0 10-10Document6 pagesWP-30018 SmartGridSPDs Rev0 10-10manubraunNo ratings yet
- Smart Grid Technology Nciaee 002Document8 pagesSmart Grid Technology Nciaee 002Mayank YadavNo ratings yet
- Development of Automated Grid Monitoring and Control System Using IoT A ReviewDocument4 pagesDevelopment of Automated Grid Monitoring and Control System Using IoT A ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Overview GridKey - Print 09.10.18Document10 pagesOverview GridKey - Print 09.10.18Nikhil SisodiaNo ratings yet
- Development of A Smart Transformer To Control The Power Exchange of A MicrogridDocument5 pagesDevelopment of A Smart Transformer To Control The Power Exchange of A MicrogridRaghavendra LakshmanNo ratings yet
- Introduccion A TR InteligentesDocument10 pagesIntroduccion A TR Inteligentestu_novia_nos_enganiaNo ratings yet
- On Grid-Interactive Smart Inverters: Features and AdvancementsDocument10 pagesOn Grid-Interactive Smart Inverters: Features and AdvancementsTeki Vamsee KrishnaNo ratings yet
- Application of Internet of Things: Last Meter Smart Grid and Smart Energy Efficient SystemDocument6 pagesApplication of Internet of Things: Last Meter Smart Grid and Smart Energy Efficient SystemJose María CotesNo ratings yet
- A Control Strategy For Implementation of Enhanced Voltage Quality in Micro GridDocument7 pagesA Control Strategy For Implementation of Enhanced Voltage Quality in Micro GriderpublicationNo ratings yet
- IET Renewable Power Gen - 2024 - Sharma - A Low Voltage Microgrid Protection Scheme Using Digital Instrument TransformersDocument12 pagesIET Renewable Power Gen - 2024 - Sharma - A Low Voltage Microgrid Protection Scheme Using Digital Instrument Transformerskhitech2002No ratings yet
- Smart Grid Integration of Iot: Fig. 1 - Classical Electrical GridDocument5 pagesSmart Grid Integration of Iot: Fig. 1 - Classical Electrical GridMiguel Esteban MartinezNo ratings yet
- Absolute Energy Routing and Real-Time Power Monitoring For Grid-Connected Distribution NetworksDocument9 pagesAbsolute Energy Routing and Real-Time Power Monitoring For Grid-Connected Distribution NetworksDharshiniVenugopalNo ratings yet
- Control of Microgrid For Different Modes of Operation IJERTV5IS051001Document6 pagesControl of Microgrid For Different Modes of Operation IJERTV5IS051001Seerat Aaftaab BarkatNo ratings yet
- IoT Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaDocument5 pagesIoT Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaAnonymous kw8Yrp0R5rNo ratings yet
- Guerrero 2013Document18 pagesGuerrero 2013Prisila DinantiNo ratings yet
- Implementation of An Application For The Time-Spectral Analysis of Supra-Harmonic Interferences in Smart GridsDocument4 pagesImplementation of An Application For The Time-Spectral Analysis of Supra-Harmonic Interferences in Smart GridsAnaraida Garcia BaigorriNo ratings yet
- Export and Import of Renewable Energy by Hybrid Microgrid Via IotDocument4 pagesExport and Import of Renewable Energy by Hybrid Microgrid Via IotDorothy ManriqueNo ratings yet
- (IJCST-V8I5P7) :naveen Kumar, Gopal SinghDocument6 pages(IJCST-V8I5P7) :naveen Kumar, Gopal SinghEighthSenseGroupNo ratings yet
- Stability Enhancement of Decentralized Inverter Control Through Wireless Communications in MicrogridsDocument11 pagesStability Enhancement of Decentralized Inverter Control Through Wireless Communications in MicrogridsARUNIMA SNo ratings yet
- Low Voltage Distribution Substation Integration in Smart MicrogridDocument8 pagesLow Voltage Distribution Substation Integration in Smart Microgridcam.joeyNo ratings yet
- Implementation of SCADA Systems For A Real Microgrid Lab TestbedDocument7 pagesImplementation of SCADA Systems For A Real Microgrid Lab TestbedJuan PavaNo ratings yet
- Novel Protection Schema For A Radial Microgrid SystemDocument6 pagesNovel Protection Schema For A Radial Microgrid SystempouyanNo ratings yet
- Smart Grid - An Intelligent Power System: Review and Future ChallengesDocument4 pagesSmart Grid - An Intelligent Power System: Review and Future ChallengesManoj Karthik KingNo ratings yet
- Dynamic Modeling of Microgrid For Grid Connected and Intentional Islanding OperationDocument6 pagesDynamic Modeling of Microgrid For Grid Connected and Intentional Islanding OperationmedbNo ratings yet
- Overview of Intelligent Substation Automation in Distribution SystemsDocument6 pagesOverview of Intelligent Substation Automation in Distribution SystemsCESAR ARTURO ORTIZ BELLIDONo ratings yet
- Smart Grid, Smart Controllers and Home Energy Automation-Creating The Infrastructure For FutureDocument10 pagesSmart Grid, Smart Controllers and Home Energy Automation-Creating The Infrastructure For FutureFranco GionoNo ratings yet
- Security Considerations For Multicast Communication in Power SystemsDocument11 pagesSecurity Considerations For Multicast Communication in Power SystemsSantanuNo ratings yet
- Smart GridDocument4 pagesSmart GridJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Antenna Survey PaperDocument8 pagesAntenna Survey PaperPavithraNo ratings yet
- Optimal Smart Grid Operation and Control Enhancement by Edge ComputingDocument6 pagesOptimal Smart Grid Operation and Control Enhancement by Edge ComputingMuhammad Atiq Ur Rehman 22-FET/PHDEE/S19No ratings yet
- Protection Strategy For Fault Detection in Inverter-Dominated Low Voltage AC MicrogridDocument8 pagesProtection Strategy For Fault Detection in Inverter-Dominated Low Voltage AC MicrogridM8ow6fNo ratings yet
- Real-Time Power Flow Monitoring and Control System For Microgrids Integration in Islanded ScenariosDocument12 pagesReal-Time Power Flow Monitoring and Control System For Microgrids Integration in Islanded ScenariosVitovich DittaNo ratings yet
- PV Inverter TopoligiesDocument6 pagesPV Inverter TopoligieslegioNo ratings yet
- Wireless Alarm Microsystem Self-Powered by Vibration-Threshold-Triggered Energy HarvesterDocument10 pagesWireless Alarm Microsystem Self-Powered by Vibration-Threshold-Triggered Energy HarvesterHans Cabrera MankowskiNo ratings yet
- Wireless Alarm Microsystem Self-Powered by Vibration-Threshold-Triggered Energy HarvesterDocument10 pagesWireless Alarm Microsystem Self-Powered by Vibration-Threshold-Triggered Energy HarvesterHans Cabrera MankowskiNo ratings yet
- Power System Analysis of A Microgrid Using ETAP: April 2015Document6 pagesPower System Analysis of A Microgrid Using ETAP: April 2015Raja GurningNo ratings yet
- The Implementation of Smart Grid Technology With SCADA As The Main Infrastructure To Support The Integration of Renewable EnergyDocument6 pagesThe Implementation of Smart Grid Technology With SCADA As The Main Infrastructure To Support The Integration of Renewable EnergyArif PriyohutomoNo ratings yet
- Protection of DC Microgrids Based On Complex Power During Faults in On Off-Grid ScenariosDocument11 pagesProtection of DC Microgrids Based On Complex Power During Faults in On Off-Grid ScenariosNahil ShakerNo ratings yet
- Solar Photovoltaic Remote Monitoring System Using IOT: Ankit Kekre Suresh K. GawreDocument5 pagesSolar Photovoltaic Remote Monitoring System Using IOT: Ankit Kekre Suresh K. Gawreمصطفاوي محمدNo ratings yet
- A Review of Smart Grid Technology: XXX-X-XXXX-XXXX-X/XX/$XX.00 ©20XX IEEEDocument8 pagesA Review of Smart Grid Technology: XXX-X-XXXX-XXXX-X/XX/$XX.00 ©20XX IEEEMomal ARNo ratings yet
- A Power Electronic Smart Load Controller For Nanogrids and Autonomous Power SystemsDocument4 pagesA Power Electronic Smart Load Controller For Nanogrids and Autonomous Power SystemsjorgeNo ratings yet
- Wa0023.Document12 pagesWa0023.nikhilsuresh549No ratings yet
- LECTURE 1 From Smart Grid To Energy InternetDocument43 pagesLECTURE 1 From Smart Grid To Energy Internetwing fatt hiewNo ratings yet
- ALL 11 0935 TIE Part IDocument9 pagesALL 11 0935 TIE Part ISorin MiuNo ratings yet
- Zhaoxia 2017Document6 pagesZhaoxia 2017Maxime BatongaNo ratings yet
- Smartgrid 160224172537Document24 pagesSmartgrid 160224172537Umesh GowdaNo ratings yet
- Dynamic Model Microturbine: of Generation System For Grid Connected/Islanding OperationDocument6 pagesDynamic Model Microturbine: of Generation System For Grid Connected/Islanding OperationMahinder ChoudharyNo ratings yet
- Fault Analysis of Three Phase Alternator Sequence Impedance: Apparatus RequiredDocument9 pagesFault Analysis of Three Phase Alternator Sequence Impedance: Apparatus RequiredMohan KrishnaNo ratings yet
- Cs Unit-2 PDFDocument33 pagesCs Unit-2 PDFMohan KrishnaNo ratings yet
- Curriculum Vitae of Mohan KrishnaDocument2 pagesCurriculum Vitae of Mohan KrishnaMohan KrishnaNo ratings yet
- Ilovepdf Merged PDFDocument19 pagesIlovepdf Merged PDFMohan KrishnaNo ratings yet
- S187Document3 pagesS187Mohan KrishnaNo ratings yet
- IoT Ambulance With Automatic Traffic Light ControlDocument3 pagesIoT Ambulance With Automatic Traffic Light ControlMohan KrishnaNo ratings yet
- Eee Dept - Student Hour-Teams For GD Topic-Role of Women in The Society Teams Ii-A Ii-B Iii-A Iii-B 1Document2 pagesEee Dept - Student Hour-Teams For GD Topic-Role of Women in The Society Teams Ii-A Ii-B Iii-A Iii-B 1Mohan KrishnaNo ratings yet
- Electrical Technology LaboratoryDocument1 pageElectrical Technology LaboratoryMohan KrishnaNo ratings yet
- Malathi ResumeDocument1 pageMalathi ResumeMohan KrishnaNo ratings yet
- C.Mohan Krishna S. Imran Khan K.Purushotham Assistant Professor Alits College of Engineering AnantapurDocument13 pagesC.Mohan Krishna S. Imran Khan K.Purushotham Assistant Professor Alits College of Engineering AnantapurMohan KrishnaNo ratings yet
- Explain The Dynamic Characteristics of SCR in Detail? 2. Explain The Constructional Details of GTO and CharacteristicsDocument1 pageExplain The Dynamic Characteristics of SCR in Detail? 2. Explain The Constructional Details of GTO and CharacteristicsMohan KrishnaNo ratings yet
- 9A02504 Power ElectronicsDocument4 pages9A02504 Power ElectronicsMohan Krishna100% (1)
- Lecture 29Document9 pagesLecture 29Guadalajara JaliscoNo ratings yet
- LM 321 LVDocument51 pagesLM 321 LVRodrigo ForrequiNo ratings yet
- T480 User GuideDocument170 pagesT480 User Guideanon_831483663No ratings yet
- 15-8 Feeder Cable - 500 009 03Document2 pages15-8 Feeder Cable - 500 009 03Brian A. MuhammadNo ratings yet
- H61 Pro BTCDocument56 pagesH61 Pro BTCKev InNo ratings yet
- Welding Procedure Specification (WPS) : Accordance To ISO 15609-1 (Arc Welding)Document1 pageWelding Procedure Specification (WPS) : Accordance To ISO 15609-1 (Arc Welding)Ramzi BEN AHMEDNo ratings yet
- IECEE - Brochure - Taking Conformity Assessment FurtherDocument20 pagesIECEE - Brochure - Taking Conformity Assessment FurtherPhoenix PhosphorescentNo ratings yet
- Dynamic Modeling Chen1999Document10 pagesDynamic Modeling Chen1999Erzsébet PállNo ratings yet
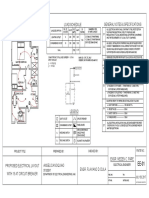
- General Notes & Specifications Load Schedule: StudentDocument1 pageGeneral Notes & Specifications Load Schedule: StudentAngelica NoquiaoNo ratings yet
- Microprocessor FundamentalsDocument29 pagesMicroprocessor FundamentalsrakhileshpkNo ratings yet
- Liebert gxt4 230v 5000 10000va User Manual SLI 23197Document66 pagesLiebert gxt4 230v 5000 10000va User Manual SLI 23197highwtonNo ratings yet
- Wireless World 1983 03Document126 pagesWireless World 1983 03Adrian DinuNo ratings yet
- 99 Guitar PhraseDocument9 pages99 Guitar PhraseCirù Monia FalcoNo ratings yet
- Esp ComponentsDocument19 pagesEsp ComponentsnawarsNo ratings yet
- 1SNC110001C0201 GB BRDocument68 pages1SNC110001C0201 GB BREdgar AlvarezNo ratings yet
- UF-450AX Catalog 2PDocument2 pagesUF-450AX Catalog 2PHuỳnh Bảo SơnNo ratings yet
- Product Data Sheet: Earth-Leakage Relay RH10M - 30 Ma - 240 VDocument3 pagesProduct Data Sheet: Earth-Leakage Relay RH10M - 30 Ma - 240 VDarwin LibrandaNo ratings yet
- Short-Circuit Analysis IEC StandardDocument46 pagesShort-Circuit Analysis IEC StandardAbdel-Rahman Saifedin Arandas100% (1)
- 100KW 500RPM Permanent Magnet Generator PDFDocument3 pages100KW 500RPM Permanent Magnet Generator PDFNicole PalomaresNo ratings yet
- DFDFDFDF PDFDocument3 pagesDFDFDFDF PDFBoubker BellahnaNo ratings yet
- B737-3 ATA 23 CommunicationsDocument112 pagesB737-3 ATA 23 CommunicationsPaul RizlNo ratings yet
- ANT-APE4518R19v07-2333-002 DatasheetDocument2 pagesANT-APE4518R19v07-2333-002 Datasheetпавел100% (1)
- Unit-4 Elecrical Drives and Controls II PartDocument29 pagesUnit-4 Elecrical Drives and Controls II PartsentamilselvanNo ratings yet
- Inverter Power Supply Design Based On Single Chip MicrocomputerDocument4 pagesInverter Power Supply Design Based On Single Chip MicrocomputeramirNo ratings yet
- BOM Transmission - OSN 1800 II Pro - 31032023xlsxDocument5 pagesBOM Transmission - OSN 1800 II Pro - 31032023xlsxThanhNN0312No ratings yet
- Exp1 Lab Report A4Document16 pagesExp1 Lab Report A4asad baigNo ratings yet
- C-118-H Acoustic System: Screen Channel Cinema Sound System Especially Designed For SubwoofersDocument2 pagesC-118-H Acoustic System: Screen Channel Cinema Sound System Especially Designed For SubwoofersGokul KrishnanNo ratings yet
- Rotron Transportation CatalogDocument54 pagesRotron Transportation CatalogSolikin PatiNo ratings yet




































































































Download as pdf or txt
You might also like
- Manual MyLab 5 PDFDocument80 pagesManual MyLab 5 PDFÉric Scolastici100% (1)
- Digital Electronics (Betty Lincoln)Document434 pagesDigital Electronics (Betty Lincoln)Rayhan Nur AhmadiNo ratings yet
- 05IPST080Document6 pages05IPST080Niveditha NamasivaayamNo ratings yet
- Control and Operation of Grid Connected DC Source Based Distribution GenerationDocument4 pagesControl and Operation of Grid Connected DC Source Based Distribution Generationgagan mahadevaNo ratings yet
- Irjet V5i520Document5 pagesIrjet V5i520baby hNo ratings yet
- A Hybrid Smart AC DC Power SystemDocument6 pagesA Hybrid Smart AC DC Power SystemYangyadatta TripathyNo ratings yet
- Unit - 4Document21 pagesUnit - 4Shock SignalNo ratings yet
- Grid Integration of Small-Scale Photovoltaic Systems in Secondary Distribution Network-A ReviewDocument18 pagesGrid Integration of Small-Scale Photovoltaic Systems in Secondary Distribution Network-A ReviewroyNo ratings yet
- Irjet V5i8304Document5 pagesIrjet V5i8304abdulrazaq bibinuNo ratings yet
- Micro-Grid Autonomous Operation During and Subs To Islanding ProcessDocument10 pagesMicro-Grid Autonomous Operation During and Subs To Islanding Processapi-3738286No ratings yet
- Modeling of A Centralized Microgrid Protection System and Distributed Energy Resources According To IEC 61850-7-420Document8 pagesModeling of A Centralized Microgrid Protection System and Distributed Energy Resources According To IEC 61850-7-420AbhishekAnandNo ratings yet
- Lecture-8: Introduction To Smart GridDocument38 pagesLecture-8: Introduction To Smart GridSuper SpecialNo ratings yet
- Protection of Domestic Solar Photovoltaic Based Microgrid: M.P Nthontho, S.P Chowdhury, S. Winberg, S. ChowdhuryDocument6 pagesProtection of Domestic Solar Photovoltaic Based Microgrid: M.P Nthontho, S.P Chowdhury, S. Winberg, S. ChowdhuryMashood NasirNo ratings yet
- Smart Grid Communication Infrastructure: Dr. Muhammad TariqDocument49 pagesSmart Grid Communication Infrastructure: Dr. Muhammad TariqAbdul HaseebNo ratings yet
- WP-30018 SmartGridSPDs Rev0 10-10Document6 pagesWP-30018 SmartGridSPDs Rev0 10-10manubraunNo ratings yet
- Smart Grid Technology Nciaee 002Document8 pagesSmart Grid Technology Nciaee 002Mayank YadavNo ratings yet
- Development of Automated Grid Monitoring and Control System Using IoT A ReviewDocument4 pagesDevelopment of Automated Grid Monitoring and Control System Using IoT A ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Overview GridKey - Print 09.10.18Document10 pagesOverview GridKey - Print 09.10.18Nikhil SisodiaNo ratings yet
- Development of A Smart Transformer To Control The Power Exchange of A MicrogridDocument5 pagesDevelopment of A Smart Transformer To Control The Power Exchange of A MicrogridRaghavendra LakshmanNo ratings yet
- Introduccion A TR InteligentesDocument10 pagesIntroduccion A TR Inteligentestu_novia_nos_enganiaNo ratings yet
- On Grid-Interactive Smart Inverters: Features and AdvancementsDocument10 pagesOn Grid-Interactive Smart Inverters: Features and AdvancementsTeki Vamsee KrishnaNo ratings yet
- Application of Internet of Things: Last Meter Smart Grid and Smart Energy Efficient SystemDocument6 pagesApplication of Internet of Things: Last Meter Smart Grid and Smart Energy Efficient SystemJose María CotesNo ratings yet
- A Control Strategy For Implementation of Enhanced Voltage Quality in Micro GridDocument7 pagesA Control Strategy For Implementation of Enhanced Voltage Quality in Micro GriderpublicationNo ratings yet
- IET Renewable Power Gen - 2024 - Sharma - A Low Voltage Microgrid Protection Scheme Using Digital Instrument TransformersDocument12 pagesIET Renewable Power Gen - 2024 - Sharma - A Low Voltage Microgrid Protection Scheme Using Digital Instrument Transformerskhitech2002No ratings yet
- Smart Grid Integration of Iot: Fig. 1 - Classical Electrical GridDocument5 pagesSmart Grid Integration of Iot: Fig. 1 - Classical Electrical GridMiguel Esteban MartinezNo ratings yet
- Absolute Energy Routing and Real-Time Power Monitoring For Grid-Connected Distribution NetworksDocument9 pagesAbsolute Energy Routing and Real-Time Power Monitoring For Grid-Connected Distribution NetworksDharshiniVenugopalNo ratings yet
- Control of Microgrid For Different Modes of Operation IJERTV5IS051001Document6 pagesControl of Microgrid For Different Modes of Operation IJERTV5IS051001Seerat Aaftaab BarkatNo ratings yet
- IoT Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaDocument5 pagesIoT Based Control and Monitoring of Smart Grid and Power Theft Detection by Locating AreaAnonymous kw8Yrp0R5rNo ratings yet
- Guerrero 2013Document18 pagesGuerrero 2013Prisila DinantiNo ratings yet
- Implementation of An Application For The Time-Spectral Analysis of Supra-Harmonic Interferences in Smart GridsDocument4 pagesImplementation of An Application For The Time-Spectral Analysis of Supra-Harmonic Interferences in Smart GridsAnaraida Garcia BaigorriNo ratings yet
- Export and Import of Renewable Energy by Hybrid Microgrid Via IotDocument4 pagesExport and Import of Renewable Energy by Hybrid Microgrid Via IotDorothy ManriqueNo ratings yet
- (IJCST-V8I5P7) :naveen Kumar, Gopal SinghDocument6 pages(IJCST-V8I5P7) :naveen Kumar, Gopal SinghEighthSenseGroupNo ratings yet
- Stability Enhancement of Decentralized Inverter Control Through Wireless Communications in MicrogridsDocument11 pagesStability Enhancement of Decentralized Inverter Control Through Wireless Communications in MicrogridsARUNIMA SNo ratings yet
- Low Voltage Distribution Substation Integration in Smart MicrogridDocument8 pagesLow Voltage Distribution Substation Integration in Smart Microgridcam.joeyNo ratings yet
- Implementation of SCADA Systems For A Real Microgrid Lab TestbedDocument7 pagesImplementation of SCADA Systems For A Real Microgrid Lab TestbedJuan PavaNo ratings yet
- Novel Protection Schema For A Radial Microgrid SystemDocument6 pagesNovel Protection Schema For A Radial Microgrid SystempouyanNo ratings yet
- Smart Grid - An Intelligent Power System: Review and Future ChallengesDocument4 pagesSmart Grid - An Intelligent Power System: Review and Future ChallengesManoj Karthik KingNo ratings yet
- Dynamic Modeling of Microgrid For Grid Connected and Intentional Islanding OperationDocument6 pagesDynamic Modeling of Microgrid For Grid Connected and Intentional Islanding OperationmedbNo ratings yet
- Overview of Intelligent Substation Automation in Distribution SystemsDocument6 pagesOverview of Intelligent Substation Automation in Distribution SystemsCESAR ARTURO ORTIZ BELLIDONo ratings yet
- Smart Grid, Smart Controllers and Home Energy Automation-Creating The Infrastructure For FutureDocument10 pagesSmart Grid, Smart Controllers and Home Energy Automation-Creating The Infrastructure For FutureFranco GionoNo ratings yet
- Security Considerations For Multicast Communication in Power SystemsDocument11 pagesSecurity Considerations For Multicast Communication in Power SystemsSantanuNo ratings yet
- Smart GridDocument4 pagesSmart GridJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Antenna Survey PaperDocument8 pagesAntenna Survey PaperPavithraNo ratings yet
- Optimal Smart Grid Operation and Control Enhancement by Edge ComputingDocument6 pagesOptimal Smart Grid Operation and Control Enhancement by Edge ComputingMuhammad Atiq Ur Rehman 22-FET/PHDEE/S19No ratings yet
- Protection Strategy For Fault Detection in Inverter-Dominated Low Voltage AC MicrogridDocument8 pagesProtection Strategy For Fault Detection in Inverter-Dominated Low Voltage AC MicrogridM8ow6fNo ratings yet
- Real-Time Power Flow Monitoring and Control System For Microgrids Integration in Islanded ScenariosDocument12 pagesReal-Time Power Flow Monitoring and Control System For Microgrids Integration in Islanded ScenariosVitovich DittaNo ratings yet
- PV Inverter TopoligiesDocument6 pagesPV Inverter TopoligieslegioNo ratings yet
- Wireless Alarm Microsystem Self-Powered by Vibration-Threshold-Triggered Energy HarvesterDocument10 pagesWireless Alarm Microsystem Self-Powered by Vibration-Threshold-Triggered Energy HarvesterHans Cabrera MankowskiNo ratings yet
- Wireless Alarm Microsystem Self-Powered by Vibration-Threshold-Triggered Energy HarvesterDocument10 pagesWireless Alarm Microsystem Self-Powered by Vibration-Threshold-Triggered Energy HarvesterHans Cabrera MankowskiNo ratings yet
- Power System Analysis of A Microgrid Using ETAP: April 2015Document6 pagesPower System Analysis of A Microgrid Using ETAP: April 2015Raja GurningNo ratings yet
- The Implementation of Smart Grid Technology With SCADA As The Main Infrastructure To Support The Integration of Renewable EnergyDocument6 pagesThe Implementation of Smart Grid Technology With SCADA As The Main Infrastructure To Support The Integration of Renewable EnergyArif PriyohutomoNo ratings yet
- Protection of DC Microgrids Based On Complex Power During Faults in On Off-Grid ScenariosDocument11 pagesProtection of DC Microgrids Based On Complex Power During Faults in On Off-Grid ScenariosNahil ShakerNo ratings yet
- Solar Photovoltaic Remote Monitoring System Using IOT: Ankit Kekre Suresh K. GawreDocument5 pagesSolar Photovoltaic Remote Monitoring System Using IOT: Ankit Kekre Suresh K. Gawreمصطفاوي محمدNo ratings yet
- A Review of Smart Grid Technology: XXX-X-XXXX-XXXX-X/XX/$XX.00 ©20XX IEEEDocument8 pagesA Review of Smart Grid Technology: XXX-X-XXXX-XXXX-X/XX/$XX.00 ©20XX IEEEMomal ARNo ratings yet
- A Power Electronic Smart Load Controller For Nanogrids and Autonomous Power SystemsDocument4 pagesA Power Electronic Smart Load Controller For Nanogrids and Autonomous Power SystemsjorgeNo ratings yet
- Wa0023.Document12 pagesWa0023.nikhilsuresh549No ratings yet
- LECTURE 1 From Smart Grid To Energy InternetDocument43 pagesLECTURE 1 From Smart Grid To Energy Internetwing fatt hiewNo ratings yet
- ALL 11 0935 TIE Part IDocument9 pagesALL 11 0935 TIE Part ISorin MiuNo ratings yet
- Zhaoxia 2017Document6 pagesZhaoxia 2017Maxime BatongaNo ratings yet
- Smartgrid 160224172537Document24 pagesSmartgrid 160224172537Umesh GowdaNo ratings yet
- Dynamic Model Microturbine: of Generation System For Grid Connected/Islanding OperationDocument6 pagesDynamic Model Microturbine: of Generation System For Grid Connected/Islanding OperationMahinder ChoudharyNo ratings yet
- Fault Analysis of Three Phase Alternator Sequence Impedance: Apparatus RequiredDocument9 pagesFault Analysis of Three Phase Alternator Sequence Impedance: Apparatus RequiredMohan KrishnaNo ratings yet
- Cs Unit-2 PDFDocument33 pagesCs Unit-2 PDFMohan KrishnaNo ratings yet
- Curriculum Vitae of Mohan KrishnaDocument2 pagesCurriculum Vitae of Mohan KrishnaMohan KrishnaNo ratings yet
- Ilovepdf Merged PDFDocument19 pagesIlovepdf Merged PDFMohan KrishnaNo ratings yet
- S187Document3 pagesS187Mohan KrishnaNo ratings yet
- IoT Ambulance With Automatic Traffic Light ControlDocument3 pagesIoT Ambulance With Automatic Traffic Light ControlMohan KrishnaNo ratings yet
- Eee Dept - Student Hour-Teams For GD Topic-Role of Women in The Society Teams Ii-A Ii-B Iii-A Iii-B 1Document2 pagesEee Dept - Student Hour-Teams For GD Topic-Role of Women in The Society Teams Ii-A Ii-B Iii-A Iii-B 1Mohan KrishnaNo ratings yet
- Electrical Technology LaboratoryDocument1 pageElectrical Technology LaboratoryMohan KrishnaNo ratings yet
- Malathi ResumeDocument1 pageMalathi ResumeMohan KrishnaNo ratings yet
- C.Mohan Krishna S. Imran Khan K.Purushotham Assistant Professor Alits College of Engineering AnantapurDocument13 pagesC.Mohan Krishna S. Imran Khan K.Purushotham Assistant Professor Alits College of Engineering AnantapurMohan KrishnaNo ratings yet
- Explain The Dynamic Characteristics of SCR in Detail? 2. Explain The Constructional Details of GTO and CharacteristicsDocument1 pageExplain The Dynamic Characteristics of SCR in Detail? 2. Explain The Constructional Details of GTO and CharacteristicsMohan KrishnaNo ratings yet
- 9A02504 Power ElectronicsDocument4 pages9A02504 Power ElectronicsMohan Krishna100% (1)
- Lecture 29Document9 pagesLecture 29Guadalajara JaliscoNo ratings yet
- LM 321 LVDocument51 pagesLM 321 LVRodrigo ForrequiNo ratings yet
- T480 User GuideDocument170 pagesT480 User Guideanon_831483663No ratings yet
- 15-8 Feeder Cable - 500 009 03Document2 pages15-8 Feeder Cable - 500 009 03Brian A. MuhammadNo ratings yet
- H61 Pro BTCDocument56 pagesH61 Pro BTCKev InNo ratings yet
- Welding Procedure Specification (WPS) : Accordance To ISO 15609-1 (Arc Welding)Document1 pageWelding Procedure Specification (WPS) : Accordance To ISO 15609-1 (Arc Welding)Ramzi BEN AHMEDNo ratings yet
- IECEE - Brochure - Taking Conformity Assessment FurtherDocument20 pagesIECEE - Brochure - Taking Conformity Assessment FurtherPhoenix PhosphorescentNo ratings yet
- Dynamic Modeling Chen1999Document10 pagesDynamic Modeling Chen1999Erzsébet PállNo ratings yet
- General Notes & Specifications Load Schedule: StudentDocument1 pageGeneral Notes & Specifications Load Schedule: StudentAngelica NoquiaoNo ratings yet
- Microprocessor FundamentalsDocument29 pagesMicroprocessor FundamentalsrakhileshpkNo ratings yet
- Liebert gxt4 230v 5000 10000va User Manual SLI 23197Document66 pagesLiebert gxt4 230v 5000 10000va User Manual SLI 23197highwtonNo ratings yet
- Wireless World 1983 03Document126 pagesWireless World 1983 03Adrian DinuNo ratings yet
- 99 Guitar PhraseDocument9 pages99 Guitar PhraseCirù Monia FalcoNo ratings yet
- Esp ComponentsDocument19 pagesEsp ComponentsnawarsNo ratings yet
- 1SNC110001C0201 GB BRDocument68 pages1SNC110001C0201 GB BREdgar AlvarezNo ratings yet
- UF-450AX Catalog 2PDocument2 pagesUF-450AX Catalog 2PHuỳnh Bảo SơnNo ratings yet
- Product Data Sheet: Earth-Leakage Relay RH10M - 30 Ma - 240 VDocument3 pagesProduct Data Sheet: Earth-Leakage Relay RH10M - 30 Ma - 240 VDarwin LibrandaNo ratings yet
- Short-Circuit Analysis IEC StandardDocument46 pagesShort-Circuit Analysis IEC StandardAbdel-Rahman Saifedin Arandas100% (1)
- 100KW 500RPM Permanent Magnet Generator PDFDocument3 pages100KW 500RPM Permanent Magnet Generator PDFNicole PalomaresNo ratings yet
- DFDFDFDF PDFDocument3 pagesDFDFDFDF PDFBoubker BellahnaNo ratings yet
- B737-3 ATA 23 CommunicationsDocument112 pagesB737-3 ATA 23 CommunicationsPaul RizlNo ratings yet
- ANT-APE4518R19v07-2333-002 DatasheetDocument2 pagesANT-APE4518R19v07-2333-002 Datasheetпавел100% (1)
- Unit-4 Elecrical Drives and Controls II PartDocument29 pagesUnit-4 Elecrical Drives and Controls II PartsentamilselvanNo ratings yet
- Inverter Power Supply Design Based On Single Chip MicrocomputerDocument4 pagesInverter Power Supply Design Based On Single Chip MicrocomputeramirNo ratings yet
- BOM Transmission - OSN 1800 II Pro - 31032023xlsxDocument5 pagesBOM Transmission - OSN 1800 II Pro - 31032023xlsxThanhNN0312No ratings yet
- Exp1 Lab Report A4Document16 pagesExp1 Lab Report A4asad baigNo ratings yet
- C-118-H Acoustic System: Screen Channel Cinema Sound System Especially Designed For SubwoofersDocument2 pagesC-118-H Acoustic System: Screen Channel Cinema Sound System Especially Designed For SubwoofersGokul KrishnanNo ratings yet
- Rotron Transportation CatalogDocument54 pagesRotron Transportation CatalogSolikin PatiNo ratings yet