
Mini Excavator Design and Analysis
Mini Excavator Design and Analysis
You might also like
- ZL50H Manual PDFDocument77 pagesZL50H Manual PDFMasoodKan75% (4)
- Backhoe Loader Finite Element AnalysisDocument55 pagesBackhoe Loader Finite Element AnalysisPrabhakar Purushothaman100% (2)
- GR-130EX: Hydraulic Rough Terrain CraneDocument16 pagesGR-130EX: Hydraulic Rough Terrain CraneDenny AjaNo ratings yet
- ForteJetOVDocument38 pagesForteJetOVJulio Cesar Lugo Ruiz100% (3)
- Design and Optimation of Arm ExcavatorDocument6 pagesDesign and Optimation of Arm Excavatoranon_664850107No ratings yet
- Hydraulic CylinderDocument40 pagesHydraulic CylinderYandapalli Sai ramNo ratings yet
- Scorpion User ManualDocument29 pagesScorpion User ManualElmer RafaelNo ratings yet
- 119.PDF Pump ConcreteDocument7 pages119.PDF Pump Concreterahul khanNo ratings yet
- Design of Post Hole Digger Machine IJERTV3IS030320Document5 pagesDesign of Post Hole Digger Machine IJERTV3IS030320Ajit KalasaitNo ratings yet
- Study of Crane Hook Having Trapezoidal Section by FiniteDocument3 pagesStudy of Crane Hook Having Trapezoidal Section by FiniteYahaira Ruiz OrtegaNo ratings yet
- 9.optimisation in Design of Mechanical Scissor LiftDocument5 pages9.optimisation in Design of Mechanical Scissor LiftAmit GhadeNo ratings yet
- Telescopic BoomDocument4 pagesTelescopic BoomLoc NguyenNo ratings yet
- Disclosure To Promote The Right To InformationDocument15 pagesDisclosure To Promote The Right To InformationKailtech Lab IndoreNo ratings yet
- Hydraulic SystemDocument12 pagesHydraulic SystemMarijan LesičakNo ratings yet
- Asme SEC 8 DIV1 IntroduccionDocument28 pagesAsme SEC 8 DIV1 Introduccionleonel lopezNo ratings yet
- 3 PTL MBD SimulationDocument8 pages3 PTL MBD SimulationSumit SheoranNo ratings yet
- Stress Analysis of Tractor Trolley Chassis With Effect of Various Thickness and Design Optimization For Weight Reduction Ijariie1894Document7 pagesStress Analysis of Tractor Trolley Chassis With Effect of Various Thickness and Design Optimization For Weight Reduction Ijariie1894anil sajjanarNo ratings yet
- Linkage in Farm MachineryDocument4 pagesLinkage in Farm MachineryRehan RashidNo ratings yet
- Roller Conveyor Chain AttachmentsDocument19 pagesRoller Conveyor Chain AttachmentsRichard VachonNo ratings yet
- Hydrualics Design DataDocument2 pagesHydrualics Design DataKeith AdminNo ratings yet
- Pipe Fittings and Port AdaptersDocument26 pagesPipe Fittings and Port AdaptersdekgaleNo ratings yet
- Problem Solving: Scissor Lift Mechanism: Learning ObjectiveDocument2 pagesProblem Solving: Scissor Lift Mechanism: Learning ObjectiveDILIP kesavan100% (1)
- Mobile Hydraulic Tips: Component Basics For Mobile Equipment HydraulicsDocument16 pagesMobile Hydraulic Tips: Component Basics For Mobile Equipment HydraulicsSamik MukherjeeNo ratings yet
- EMC ActuatorsDocument80 pagesEMC ActuatorsnageshNo ratings yet
- Report - Hydraulic Pipe Bending MachineDocument2 pagesReport - Hydraulic Pipe Bending MachinedhirajNo ratings yet
- Agricultural Trailer - SpecificationsDocument11 pagesAgricultural Trailer - SpecificationsEdsel Jay RaperNo ratings yet
- 2 Hydraulic Cylinder EKZDocument25 pages2 Hydraulic Cylinder EKZthanhNo ratings yet
- Lubrication Layer Properties During Concrete PumpingDocument10 pagesLubrication Layer Properties During Concrete PumpingsaiNo ratings yet
- Buckling Análysis of Telescopic Boom PDFDocument7 pagesBuckling Análysis of Telescopic Boom PDFAndonny Daq DelgadoNo ratings yet
- Air Spring For Rails PDFDocument52 pagesAir Spring For Rails PDFRavi KaushikNo ratings yet
- General Specifications of Hydraulic CylindersDocument8 pagesGeneral Specifications of Hydraulic CylindersmehrashashankNo ratings yet
- Hydraulic CylindersDocument7 pagesHydraulic Cylinderspacopil34No ratings yet
- MC 451 Lecture 7-2020 PDFDocument108 pagesMC 451 Lecture 7-2020 PDFChilumba ChisengaNo ratings yet
- Master Cylinder DesignDocument4 pagesMaster Cylinder DesignAtifNo ratings yet
- Position Control Hydraulic Cylinder With MicrocontrollerDocument15 pagesPosition Control Hydraulic Cylinder With Microcontrolleramin342No ratings yet
- 2 Wheel Drive Forklift For Industry WarehousesDocument5 pages2 Wheel Drive Forklift For Industry WarehousesSuyog MhatreNo ratings yet
- ME 1305 Applied Hydraulics and PneumaticsDocument6 pagesME 1305 Applied Hydraulics and PneumaticsSuresh VeluNo ratings yet
- NBC Training Report - Ball Bearing DivisionDocument51 pagesNBC Training Report - Ball Bearing DivisionBrandon Johnson100% (6)
- A-313 - 98Document7 pagesA-313 - 98José Ramón GutierrezNo ratings yet
- Reich 0001 PDFDocument87 pagesReich 0001 PDFYordys Domínguez RodríguezNo ratings yet
- Jurnal Analisa Kegagalan Pada Rangka TrukDocument13 pagesJurnal Analisa Kegagalan Pada Rangka TrukBaskara Surya WidagdoNo ratings yet
- Fabrication of Conveyor Belt With Auto Pick and Place and Digital CounterDocument3 pagesFabrication of Conveyor Belt With Auto Pick and Place and Digital CounterUmarani DursethiNo ratings yet
- Plummer Block Catalogue PDFDocument36 pagesPlummer Block Catalogue PDFMadhava PadiyarNo ratings yet
- Diploma in Mechanical Engineering: Hydraulic Fork LiftDocument43 pagesDiploma in Mechanical Engineering: Hydraulic Fork Liftmanoj phadtare100% (1)
- Slitter Plant: Prepared By: Vedant SankheDocument20 pagesSlitter Plant: Prepared By: Vedant SankheVedant SankheNo ratings yet
- SteelDocument28 pagesSteelAshfaq SaudagarNo ratings yet
- Installing Machine Tools: Here's What To ConsiderDocument1 pageInstalling Machine Tools: Here's What To ConsiderMobile SunNo ratings yet
- Hydraulic Cartridge Logic Valves - Hydraulic ValveDocument2 pagesHydraulic Cartridge Logic Valves - Hydraulic Valveasif bashaNo ratings yet
- S49-800-1S Vibro SeparatorDocument4 pagesS49-800-1S Vibro SeparatorBudi HermawanNo ratings yet
- Hydraulic Gear Pumps Market 2016 Global Industry SizeDocument8 pagesHydraulic Gear Pumps Market 2016 Global Industry SizefullkuleNo ratings yet
- Concrette Pump STD Main PumpDocument3 pagesConcrette Pump STD Main PumpHidayatNo ratings yet
- CNC Notching and Marking Machines: at 820 E CNC - at 820 E HD CNCDocument2 pagesCNC Notching and Marking Machines: at 820 E CNC - at 820 E HD CNCdesetekNo ratings yet
- 081 - ME8594, ME6505 Dynamics of Machines - Notes 4 PDFDocument99 pages081 - ME8594, ME6505 Dynamics of Machines - Notes 4 PDFKrish NarayananNo ratings yet
- Appendix 1 - Technical SpecificationDocument119 pagesAppendix 1 - Technical SpecificationMarleneLopes100% (1)
- Design of Material Handling Equipments (Use of Approved Data Book Is Permitted) LTPC 3 0 0 3 1. Materials Handling Equipment 5Document1 pageDesign of Material Handling Equipments (Use of Approved Data Book Is Permitted) LTPC 3 0 0 3 1. Materials Handling Equipment 5Nantha Kumar100% (1)
- J Tws 2014 09 009 PDFDocument9 pagesJ Tws 2014 09 009 PDFHisham SyedNo ratings yet
- Hydraulic PipingDocument1 pageHydraulic Pipingpandunugraha04100% (1)
- GMD 16 20 Operators ManualDocument80 pagesGMD 16 20 Operators ManualVladimir ArsicNo ratings yet
- Akumulator BrosurDocument17 pagesAkumulator BrosurFaruk MirasyediNo ratings yet
- Modelling and Analysis of Excavator Arm: B. Raghu, B. Rajesh, CH. Swathi, D. Rishikesh, G. Abdul KadirDocument21 pagesModelling and Analysis of Excavator Arm: B. Raghu, B. Rajesh, CH. Swathi, D. Rishikesh, G. Abdul KadirShiee ShieeNo ratings yet
- Design and Analysis of 22 Ton Class Excavator Swing Braking SystemDocument6 pagesDesign and Analysis of 22 Ton Class Excavator Swing Braking SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Motor Truck Logging Methods Engineering Experiment Station Series, Bulletin No. 12From EverandMotor Truck Logging Methods Engineering Experiment Station Series, Bulletin No. 12No ratings yet
- Teaching in “The “Land of Smile”: Anecdote of Filipino Substitute Teachers in ThailandDocument5 pagesTeaching in “The “Land of Smile”: Anecdote of Filipino Substitute Teachers in ThailandInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Proposed Model for Fainting People Detection Using Media Pipe TechnologyDocument4 pagesA Proposed Model for Fainting People Detection Using Media Pipe TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Evaluating the Performance of Vapor Compression Cycle by Adding NanoparticleDocument12 pagesEvaluating the Performance of Vapor Compression Cycle by Adding NanoparticleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Exploring Well-being in College Students: The Influence of Resilience and Social SupportDocument11 pagesExploring Well-being in College Students: The Influence of Resilience and Social SupportInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Implementation of Total Productive Maintenance on Frame Welding Machine Maintenance Using the Overall Equipment Effectiveness (OEE) Method at PT Electronics Components IndonesiaDocument10 pagesImplementation of Total Productive Maintenance on Frame Welding Machine Maintenance Using the Overall Equipment Effectiveness (OEE) Method at PT Electronics Components IndonesiaInternational Journal of Innovative Science and Research Technology100% (1)
- Automatic Essay Scoring with Context-based Analysis with Cohesion and CoherenceDocument8 pagesAutomatic Essay Scoring with Context-based Analysis with Cohesion and CoherenceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Clinical Approach to Advanced Mantle Cell Lymphoma: A Detailed Case AnalysisDocument5 pagesClinical Approach to Advanced Mantle Cell Lymphoma: A Detailed Case AnalysisInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design Information Security in Electronic-Based Government Systems Using NIST CSF 2.0, ISO/IEC 27001: 2022 and CIS ControlDocument8 pagesDesign Information Security in Electronic-Based Government Systems Using NIST CSF 2.0, ISO/IEC 27001: 2022 and CIS ControlInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Role of Haematological Indices, Interleukin-10, Tumour Necrosis Factor and Vascular Endothelial Growth Factor on Gastric Ulcer Healing in Obese Wistar Rats: Effect of Garlic OilDocument13 pagesRole of Haematological Indices, Interleukin-10, Tumour Necrosis Factor and Vascular Endothelial Growth Factor on Gastric Ulcer Healing in Obese Wistar Rats: Effect of Garlic OilInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Temperature Call Alert to Prevent Child Death from Heatstroke in Smart Car using IoTDocument12 pagesTemperature Call Alert to Prevent Child Death from Heatstroke in Smart Car using IoTInternational Journal of Innovative Science and Research Technology100% (2)
- Teacher Humor Style and Attention Span of Grade 7 StudentsDocument5 pagesTeacher Humor Style and Attention Span of Grade 7 StudentsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Effects of Methanol Extract of Celery (Apium graveolens) Leaf on Ethanol-Induced Left Ventricular Changes in Wistar RatsDocument7 pagesEffects of Methanol Extract of Celery (Apium graveolens) Leaf on Ethanol-Induced Left Ventricular Changes in Wistar RatsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Making and Assessing an Antibacterial Cream with Dalbergia Sissoo Leaf ExtractDocument9 pagesMaking and Assessing an Antibacterial Cream with Dalbergia Sissoo Leaf ExtractInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Conceptualized Fusion Reactor based on Gas Turbine with High Temperature CO2Document7 pagesConceptualized Fusion Reactor based on Gas Turbine with High Temperature CO2International Journal of Innovative Science and Research TechnologyNo ratings yet
- The Rise of Advanced VTS/VTMS SystemsDocument14 pagesThe Rise of Advanced VTS/VTMS SystemsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- ALBULARYO: Advanced Learning for Botanical Understanding, Leveraging Artificial Recognition using Convolutional Neural NetworksDocument5 pagesALBULARYO: Advanced Learning for Botanical Understanding, Leveraging Artificial Recognition using Convolutional Neural NetworksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Human-Computer Interaction in Cloud SystemsDocument6 pagesHuman-Computer Interaction in Cloud SystemsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Comparative Cognitive Performance of 60-Year-Old Asian and Western Pilots on the CogScreen Test: A Cross-Sectional StudyDocument6 pagesComparative Cognitive Performance of 60-Year-Old Asian and Western Pilots on the CogScreen Test: A Cross-Sectional StudyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Thickness CipherDocument3 pagesThickness CipherInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Promotion and Brand Awareness Analysis of Purchase Intention Sharp Brand Smart TVs in Surabaya TimurDocument7 pagesPromotion and Brand Awareness Analysis of Purchase Intention Sharp Brand Smart TVs in Surabaya TimurInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Digital Literacy and Critical Thinking Skills Among Grade 5 LearnersDocument4 pagesDigital Literacy and Critical Thinking Skills Among Grade 5 LearnersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Role of Environmental Accounting in Promoting Sustainable Business Practices A Case Study of Turkana County, KenyaDocument7 pagesRole of Environmental Accounting in Promoting Sustainable Business Practices A Case Study of Turkana County, KenyaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Optimizing Textual Regulation Interpretation for Maximum ImpactDocument5 pagesOptimizing Textual Regulation Interpretation for Maximum ImpactInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Expanding Attack Surface: Securing AI and Machine Learning Systems in Security OperationsDocument8 pagesThe Expanding Attack Surface: Securing AI and Machine Learning Systems in Security OperationsInternational Journal of Innovative Science and Research Technology100% (1)
- The Multinational Telecommunication Companies as a Moderator to Achieve Sustainable Development Considering Standard of Living and Digital Education in Sri LankaDocument11 pagesThe Multinational Telecommunication Companies as a Moderator to Achieve Sustainable Development Considering Standard of Living and Digital Education in Sri LankaInternational Journal of Innovative Science and Research Technology100% (1)
- Human Resource Functions: Examining Insights from ABC Research OrganizationDocument9 pagesHuman Resource Functions: Examining Insights from ABC Research OrganizationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of Store Atmosphere and Customer Experience on Consumer Purchasing Decisions of KFC Wahidin GresikDocument5 pagesThe Impact of Store Atmosphere and Customer Experience on Consumer Purchasing Decisions of KFC Wahidin GresikInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- An Appraisal of Employable Content of the National Diploma in Architectural Technology Program in North East NigeriaDocument5 pagesAn Appraisal of Employable Content of the National Diploma in Architectural Technology Program in North East NigeriaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of the Commercial Agriculture Credit Scheme (CACS) on the Agricultural Economy of Nigeria and its Total Output (2015-2019)Document8 pagesThe Impact of the Commercial Agriculture Credit Scheme (CACS) on the Agricultural Economy of Nigeria and its Total Output (2015-2019)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Teacher-Induced Academic Stress: Predicting Eating Behavior Problems in College StudentsDocument8 pagesTeacher-Induced Academic Stress: Predicting Eating Behavior Problems in College StudentsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Manual Martillo Atlas Copco 2200 7000 3390500505Document3 pagesManual Martillo Atlas Copco 2200 7000 3390500505Cesar QuintanillaNo ratings yet
- Moog Serioes Flotork Rotary Actuators Catalogue en Usa202008Document64 pagesMoog Serioes Flotork Rotary Actuators Catalogue en Usa202008Edgar Allende ChavezNo ratings yet
- Agma Iso 10064-1Document34 pagesAgma Iso 10064-1Mohammad Ali Taghdiri100% (3)
- Back To Iiasics, ... : Design Involute GearDocument11 pagesBack To Iiasics, ... : Design Involute Gearabdul rachim100% (1)
- Motor-Bomba ProlepenteDocument8 pagesMotor-Bomba ProlepenteRichards Villalobos RojasNo ratings yet
- Transfer Case NVG 246Document342 pagesTransfer Case NVG 246Cesar Augusto GalloNo ratings yet
- Warning: Section 25 - Mechanical Front Axle - Chapter 1 10Document32 pagesWarning: Section 25 - Mechanical Front Axle - Chapter 1 10rodrigoNo ratings yet
- Pons MED03 Tolerances E4.13Document68 pagesPons MED03 Tolerances E4.13Elliot SmithNo ratings yet
- 07a6ec05 Designofmachinemembers IIDocument11 pages07a6ec05 Designofmachinemembers IIzahid_polyNo ratings yet
- Company HistoryDocument15 pagesCompany HistorySuganthan DuraiswamyNo ratings yet
- MESYS Shaft CalculationDocument28 pagesMESYS Shaft CalculationZoebairNo ratings yet
- SHELL Omala Oils, Premium Quality Industrial Gear OilsDocument3 pagesSHELL Omala Oils, Premium Quality Industrial Gear OilsnanjayNo ratings yet
- TranscoDocument4 pagesTranscoYusuf DabhiyaNo ratings yet
- 2011 2013 Mercury 150 Manual Ber2koDocument584 pages2011 2013 Mercury 150 Manual Ber2koChris ArampatzisNo ratings yet
- Automobile PDFDocument58 pagesAutomobile PDFjaycee68No ratings yet
- s91 Operator ManualDocument199 pagess91 Operator Manualjuliocesar.caNo ratings yet
- What Is DifferentialDocument9 pagesWhat Is Differentialprem sagarNo ratings yet
- Catalog Reductor Armonic Cu RulmentiDocument20 pagesCatalog Reductor Armonic Cu RulmentiAkeidirNo ratings yet
- Flexview InstallationDocument25 pagesFlexview InstallationGeorgios MariolisNo ratings yet
- 793 793b 793cDocument8 pages793 793b 793cJulio Elias Mayta RamosNo ratings yet
- System OperationDocument82 pagesSystem OperationAntonio MejicanosNo ratings yet
- CL 7000 144126 Parts List PDFDocument3 pagesCL 7000 144126 Parts List PDFYash PandyaNo ratings yet
- Catalog Parts 1Document171 pagesCatalog Parts 1Fernanda AndradeNo ratings yet
- ZF6HP26 A PDFDocument5 pagesZF6HP26 A PDFJesus UrrietaNo ratings yet
- CPP Energy Generation Using Speed Breaker LDocument39 pagesCPP Energy Generation Using Speed Breaker Latharvsalunkhe6105No ratings yet
- Gearbox Parts ManualDocument57 pagesGearbox Parts ManualRELOJERIANo ratings yet





















































































































Volume 2, Issue 11, November 2017 International Journal of Innovative Science and Research Technology
ISSN No:-2456 2165
Mini Excavator Design And Analysis
Salih Korucu1, Ahmet Eren Kk2, Grcan Samta3
1
Gazi University, Faculty of Technology, Department of Manufacturing Engineering, Beevler, Ankara, Trkiye
Skorucu@Gazi.Edu.Tr
2
Housing Estate Administration (Toki), Central Building, Bilkent Plaza, ankaya, Ankara, Trkiye
Ahmeterenkucuk@Hotmail.Com
3
Dzce University, Engineering Faculty, Department of Mechatronics, Beci, Dzce, Trkiye
Grcann@Gmail.Com
AbstractExcavator is a work machine used in hydraulic cylinders under loads and the elastic deformations
excavation works and also used to break hard objects of the arms. The study by patel and prajapati [3] used the
such as concrete and rock. In rapidly growing industry finite element method to investigate the bucket capacity of a
excavators, on the ground, are expected to have a better mini digger-loader and the forces that occur during digging.
performance. Especially during excavation, the In the study where sae standards were considered, the
excavating force produced by the actuators, undertakes performance of the mini excavator was assessed using the
a critical task. Furthermore, the excavating forces load values provided in the standards. Traditional methods
developed by the excavators must be larger than the play an important role in energy savings of hydraulic
resistance forces of the ground. In this study, it is aimed excavators. However, they generally use to much fuel while
to manufacture mini excavators, which are not working and the biggest factor causing this is their poor
manufactured and assembled in our country and exhaust systems. Therefore, they should be designed with
imported from abroad, and to reduce our dependency on new technologies for efficient fuel consumption. Especially
the outside in this sector. In line with this goal, this study nowadays, researchers are developing excavators with
includes design and analysis of a mini excavator with 10- hybrid technologies that contain electrical elements. Wang
12 hp engine power and a 175 bar pressure with a et al. [4] analyzed the performances of semi-hybrid
working weight of 1000-1500 kg. hydraulic excavators with 5 tons of capacity. For this, the
compared models that included two different structures of
KeywordsExcavator; Mini Excavator; Excavator hybrid movement. Likewise, lin et al. [5] worked on
Analysis; Excavator Design; Hydraulic recycling energy for hybrid hydraulic excavators. In the
study on regaining the potential energy of a hybrid hydraulic
excavator, they regained approximately 41% of the total
I. INTRODUCTION energy. Design and performance assessments of excavators
differ based especially on the material that their arms are
In the first half of the 20th century, cable excavators became made of. Other studies on these machines changed the
dominant in construction yards and mining markets via materials that especially the bucket and arms were made of
cables. These are machines that are preferred for digging and investigated the behaviors against loads. Solazzis [6]
and loading in the earth processing industry. At that time, study used 6061 t6 aluminum alloys instead of alloy steel
there was no alternative option for loading tasks. In the for their excavators arms. With this material and under
second half of the century, all these changed significantly by different loading conditions, they investigated the
the introduction of the hydraulic excavator. Especially after performance of the loading arm and bucket arms for stress,
wwii, various producers in italy, france and the united states lifting in different distances based on rotation axis,
started to produce the hydraulic excavator as we know it maximum loading conditions, the state of the hydraulic
today. The first excavator that was made after the war was cylinders, and issues that may arise in the excavator due to
invented in 1946 by ray ferwerda, an inventor in cleveland, wear out conditions. Budy et al. [7] studied the control of
ohio [1]. Works of design and production on excavators are the excavator process by application of independent valves
also evaluated in the scientific sense. One of these studies mounted on the excavator. This approach allows one to
was conducted by salcudean et al. [2] in the study, they avoid the closed control system with a transducer and sensor
solved the problem of controlling the mini excavator they mounted on the excavator. In the accepted system, there are
designed with single-action hydraulic cylinder. They two systems as a microcomputer and a hydraulic unit (pump
especially monitored the state of excavator arms against the and independent valves). System performance is validated
load in the working environment by setting up a closed by monitoring the sudden changes in the cylinders. They
cycle system. They mathematically modelled the arm of this included the experimental results of the study. There are
mini excavator they invented for static and dynamic also studies on robotic excavators as opposed to excavators
movement. In their design, they used solenoid control valves controlled by an operator. Controlling a robotic excavator is
for each working element. The process of dynamically difficult due to the following issues: parameter changes in
modelling excavator is used to determine the behavior of their mechanical structures, various non-linear hydraulic
IJISRT17NV89 www.ijisrt.com 198
Volume 2, Issue 11, November 2017 International Journal of Innovative Science and Research Technology
ISSN No:-2456 2165
accelerators and imbalances created by ground contact. Lee a relationship among the diggers velocity vector, inverse
et al. [8] achieved the control of a heavy-duty robotic kinematics applications and the oil flow for the three
excavator by using an integrated sliding surface and time- cylinders. An excavators capacity depends on parameters
delay. In their study, they used a 21-ton excavator. such as the digging force provided by the diggers power,
Operations were carried out in compliance with the speed the maximum breakout force provided by the arm cylinder,
settings used by an operator. Gravity and friction forces lifting capacity, progression speed and the maximum slope
have a significant role in excavators, which are heavy that it can climb. In their study, sar and ercan [16]
construction equipment in terms of performance and control. developed a method that allows technical and economic
Tafazoli et al. [9] proposed a new approach for unbundled selection of hydraulic systems by using parameters that
estimation of gravity parameters. In their study, they made a determine the performance of an excavator. Chang and lee
computer-controlled mini excavator perform static [17] achieved the control of straight-line movement
experiments in order to estimate gravity parameters. For monitoring for a hydraulic excavator system. The control
indirect measurement of junction torques of the hydraulic results were applied on the straight-line movements of a 13-
cylinders, they used loading pins. Todays hydraulic ton excavator with a digger speed of 0.5 m/s. These criteria
excavators are widely used in construction, mining, digging are based on the level of speed where operators do precision
and forestry. Even if the operator is experienced, attention work. It is needed to reduce vibrations in the moving arms
must be paid on field conditions, soil parameters, soil- of mobile machines such as excavators, cranes and forest
machine interaction conditions during the process of processing machines [18,19]. Ding et al. [20] achieved self-
digging. Finding the forces between the soil and the adjusting pressure feedback control with pole placement and
machine especially during digging helps design the using an independently-measured fluid-controlled power
excavator better. Patel and prajapati [10] conducted research system to reduce vibrations. This study presents the design
on soil-machine interaction during digging using a mini and analyses of a mini excavator with a weight of 1000-
excavator. The study analyzed soil mechanics, interaction 1500 kg, power of 10-12 hp and pressure of 175 bar.
forces between the soil and the machine and various
parameters that affect the soil-excavator interaction during
the actual process of digging. Tafazoli et al.s [11] study II. MINI EXCAVATOR DESIGN
experimentally demonstrated the control of the resistance
they developed for excavators in laboratory conditions.
Firstly, they addressed the problem of resistance control for In the design stage of the study, among the catalog values, a
a single hydraulic cylinder and used a method for the rubber pallet that was designed for mini excavators of
weight 1000-1500 kg was selected with a standard of
analysis of system stability. An excavator is a common form
180x72x37 (180: pallet width, 72: pallet gear step and 37:
of machines that mechanically control soil movement. This
number of links). The selected can endure machines with the
usually requires control by a person. However, recently,
weight of up to 3 tons. The other reason for choosing a
equipment producers have started to develop automated
machines in an ever-increasing popularity in terms of rubber pallet was the aim to prevent ground deformations
machine health [12]. Excavators are frequently used like that are caused by steel pallets in working environments
such as roads, pavements and parks. After the dimensions of
cranes at construction sites with the purpose of carrying
the pallet were determined, a chain gear and two ctm1016 cf
equipment. This brings about significant health and safety
brzv 100 orbit power engines with brakes were selected. The
risks. Edwarda and holt [13] found in their theoretical
moving speed of the power engine changes in the range of 2
analysis that excavators are used both formally, and less
convincingly, informally as cranes at load anchorages. km/h-1.6 km/h. The displacement volume of the engine was
Dangers of using excavators as cranes (usually at load 100 cm3/rev. For the power engine, the study used the
maximum pressure of 175 bar, 1120 nm of torque, 40 l/min
anchorages and unlinking accessories) may lead to cataleptic
flow and 65 rpm. For the designed excavator, the fuel tank
failure. A study investigated the risk controls proposed for
volume was determined as 17 liters and the hydraulic tank
lifting weights or making them lighter. Ding et al. [14]
volume was determined as 27 liters. The step interval of the
achieved the control of self-adjusting pressure feedback with
pole placement in order to reduce vibration in an excavator pallet material was chosen as 72 mm, the chain gear that is
with an independently measured fluid-controlled power suitable for the ansi metric standards and the power engine
that would actuate the gear were determined, the idler wheel
system. The independently measured control systems for the
required for the pallet and the design that would add tension
excavator they used are promising in terms of fluid power
with the single-action cylinder connected to the idler wheel
technologies as opposed to valve-controlled traditional
systems. They used a mini excavator for the experiments in were completed, and the subframe was designed. The palled
their study. Budny et al. [15] investigated the control of a was modelled by drawing a template based on the pallet
dimension with the length of 2664 mm (figure 1).
digging operation by implementing load-independent
hydraulic valves. This approach aimed to control the closed
cycle system with the help of sensors and transducers
mounted on excavators. No sensor cells were mounted on
the additional parts of the machine such as the arms. The
designed system consisted of two sub-sections as a
microcomputer and a hydraulic unit (pump and load-
independent valves). In the microcomputer unit, they found
IJISRT17NV89 www.ijisrt.com 199
Volume 2, Issue 11, November 2017 International Journal of Innovative Science and Research Technology
ISSN No:-2456 2165
The drive train design was completed by seeing that the
parts worked in harmony with each other after considering
the pallet template and the other parts, designing the idler
wheel and the idler rollers. In the machine that was designed
with consideration that indoor repairs and building
demolishment are among the significant usage areas of mini
excavators, the end to end distance between the two pallets
were designed as 892 mm and it was made possible for the
machine to pass through building entrances. Selection of the
central gear that will allow the machine to rotate 360
degrees on its axis was made by considering the axial and
moment forces the subframe would be exposed to, and
additionally, a model was formed based on the catalog
dimensions and placed on the subframe design (figure 3).
Figure 1. The Pallet Modelled and Cross-Sectioned
Based on the Catalog Dimensions
In the construction machine whose pallet design was
completed, the idler wheel, pallet-stretching cylinder, power
engine, idler rollers and pallet chain gear were designed to
form the drive train of the machine. The power engine that
was calculated based on the machines weight and the
desired progression speed was modelled, again, based on the
catalog dimensions, and placed on the subframe design.
While calculating the torque value for the power engine, it
was aimed that the machine would be able to climb land
with a slope of 45 degrees. As a result of the calculations,
the pallets chain gear was designed by considering meeting
the maximum torque value obtained from the power engine,
the chain gear step length of 72 mm, and the diameter value
in the pallets template. Here, the gear tooth bottom
diameter and the diameter of the idler wheel were held the Figure 3. Design of the Drive Train
same to make the bottom and the top of the pallet to work in
parallel to the ground (figure 2). The subframe design was completed by designing a dozer
blade which, as opposed to the case in heavy-tonnage
construction machines, plays the role of rear weight,
establishes balance by preventing the machine from falling
forward during digging and has the function of plowing at
the same time, and calculating hydraulic cylinder power and
stroke length (figure 3). As the second step for the design of
the machine whose subframe design was completed, upper
frame sheet metal plate design was carried out. The most
important parts of the machine are the parts like the diesel
engine, hydraulic pump, hydraulic cooler, fuel and oil tanks,
swing hydraulic motor, hydraulic valves, joystick and
controls which are located in the upper frame that was
initiated for design by considering the central gear
dimensions that connect the upper frame and the subframe
(figure 4).
Figure 2. Pallet Chain Gear Model
IJISRT17NV89 www.ijisrt.com 200
Volume 2, Issue 11, November 2017 International Journal of Innovative Science and Research Technology
ISSN No:-2456 2165
rpm, displacement rate of 22 cm3/rev, power value of 7.4
kw and torque value of 44 nm. The study used a kubota
d722-e3b 3-cylinder liquid-cooled diesel engine with a
maximum revolution rate of 3600 rpm and engine power of
14.9 kw. The design used 2050 rpm and 7.4 kw power. As
the battery for the diesel engine, a 390 a sae battery with a
voltage of 12v and capacity of 42ah was selected. Suction
line hose diameter was 1 / 1/4 inches, return line hose
diameter was 1 inch, the diameter of the pressure line of the
valve block from the pump was inches and the diameter
of the working line from the valve block to the receiver was
3/8 inches. The model walvoil full flow sharing dpx050 bsp
was used as the valve block of the system. This valve block
consists of 9 sections. It contains 6 electrical proportional
valves (one for the swing motor, on for the dozer blade
cylinder, one for the boom-arm cylinder, one for the bucket-
arm cylinder, one for the boom-frame cylinder and one for
the boom-right-left cylinder) and 3 hydraulic signal-
controlled proportional valves (one for crusher pedal control
and two for the right and left control pedals of the power
engines).
In the next stage, for the mini excavator whose upper frame
design was completed, the design process continued with the
arm, boom and bucket, which would carry out the digging
operation. While designing the digging parts of the machine,
the digging power of the bucked and the arm piece was
considered. The boom, arm and bucket were designed such
that during digging, if the operation of breaking will be
made with the bucket the maximum breakout force would be
Figure 4. Design of the Upper Frame about 950 kg, and if the operation will be made with the arm
piece, it would be about 500 kg-f. As counterweight parts
While designing the excavator, the hydraulic cylinders that that are mounted on the rear side of the machine in high
were needed were determined based on the bucket breakout tonnage construction machines have limited usage in mini
force needed during the process of digging. A dozer blade excavators due to lack of space, in order for the center of
cylinder was chosen with an outer cylinder diameter of 75 gravity of the machine to be in positions that would allow
mm, piston diameter of 63 mm, piston arm mill diameter of balanced operation in the maximum forces from the digging
40 mm and stroke length of 55 mm. A boom-arm cylinder parts of the machine, the arm, boom and bucket designs
was chosen with an outer cylinder diameter of 75 mm, were adjusted accordingly. The designed excavator has the
piston diameter of 63 mm, piston arm mill diameter of 40 feature of carrying out the digging process without the need
mm and stroke length of 380 mm. A bucket-arm cylinder for the swing movement by rotating the boom piece towards
was chosen with an outer cylinder diameter of 75 mm, right and left with the help of a link and a hydraulic
piston diameter of 63 mm, piston arm mill diameter of 40 cylinder. With this feature, it is possible for the designed
mm and stroke length of 285 mm. A boom-frame cylinder excavator to carry out digging operations in working spaces
was chosen with an outer cylinder diameter of 75 mm, with little room for maneuvering. The boom is able to rotate
piston diameter of 63 mm, piston arm mill diameter of 40 towards right or left by 73 degrees without the need for the
mm and stroke length of 316 mm. A boom-right-left swing movement with the help of a hydraulic cylinder. The
cylinder was chosen with an outer cylinder diameter of 75 dimensions of the parts that were readily purchased in the
mm, piston diameter of 63 mm, piston arm mill diameter of design process (diesel engine, hydraulic pump, swing
40 mm and stroke length of 200 mm. Two pallet-stretching rotation hydraulic engine, valve block, hydraulic cooler,
cylinders were chosen an outer cylinder diameter of 70 mm, radiator, battery, seat and joystick) were taken from the
piston diameter of 60 mm, piston arm mill diameter of 40 catalog values. The starting point of the design was the
mm and stroke length of 75 mm. In addition to the hydraulic subframe. As the starting point in the subframe, the rubber
cylinders, for the two power engines in the subframe and the pallet was taken as the basis. The parts of the mini excavator
swing movement that allows the machine to rotate 360 designed and installed in the computer environment were
degrees on its axis, we chose a casappa lvp 30 axial-piston connected in harmony with each other (figure 5).
hydraulic pump with a displacement rate of 28.8 cm3/rev
that would run the system on the flow and pressure values
needed by the orbit bmr-200 hydraulic engine with a
displacement rate of 200.9 ml/rev. For the hydraulic pump,
the study used a pressure of 125 bar, revolution rate of 2050
IJISRT17NV89 www.ijisrt.com 201
Volume 2, Issue 11, November 2017 International Journal of Innovative Science and Research Technology
ISSN No:-2456 2165
analyses were made accordingly. Calculations were made
for the central gear and pinion that allow mini excavators to
rotate 360 degrees on their axis, a swing hydraulic motor
that would allow 9 rounds of rotation per minute with 380
nm of torque was selected as a result of the calculations, and
the analyses were made accordingly. Cylinder selection was
made by calculating the bucket breakout force of the
machine as approximately 950 kg-f and its arm breakout
force as approximately 500 kg-f during digging. These
forces were considered in the analyses on the digging parts
of the machine, and the arm, boom and bucket materials
were given their final pre-production form. Before the
analysis, in order to be sure that we represented the
subframe correctly in terms of geometry and behavior, the
correct mesh size was selected by finite elements
convergence analysis. Using the stress values as a result of
the applied mesh, the mesh size was reduced gradually, and
the correct mesh size for the subframe was determined based
on the concept of convergence.
The maximum stress value was 841 n/mm2 for a mesh size
Figure 5. The Designed Mini Excavator of 20 mm, 805 n/mm2 for a mesh size of 30 mm, 857
n/mm2 for a mesh size of 40 mm, 839 n/mm2 for a mesh
Analyses were carried out on this model using the method of size of 50 mm, and 762 n/mm2 for a mesh size of 60 mm.
finite analysis, the endurance of the machine to the forces As the stress value changed less in comparison to the stress
that it would encounter were examined before production. values in other mesh size when the mesh size is set as 50
mm and 40 mm, it was found that the mesh size of 40 mm
III. MINI EXCAVATOR ANALYSIS was the most suitable size for the part (figure 6).
The rubber pallet, power engine, chain gear and idler wheel
single-action cylinder parts which were chosen based on
their catalog dimension were obtained, subframe design was
conducted and analyses were carried out before production.
The analyses were carried out using the finite element
method, and the final design of the subframe was completed.
After determining the capacities and dimensions of all the
parts to be used in the subframe, finally, the design of the
sheet metal plate was made for these parts to work in
harmony with each other and with the needed durability. In
the subframe, as the material for sheet metal, bearings and
mills, the study used st-37 and 4140 tempered steel, which
are easily accessible in the metal industry. Before the finite
elements analysis, all sheet metal materials were assigned as
st-37 steel in the materials library of the analysis software.
Similarly, all bearing and mill materials were assigned as
4140 tempered steel again in the materials library of the
analysis software. After all parts were assigned materials,
the weight of the subframe was found by the software as 360
kg, and the center of gravity was found at a 11.72-mm
distance from the central gear.
A. Subframe finite elements analysis
After material assignment, forces that the parts would Figure 6. Subframe Analysis (Bottom Part)
endure were applied on them, the deformations on the
material were examined and the necessary revisions were
made on the frame. The power engines were selected by After the mesh value suitable for the subframe was
designing the machine in a way that would allow it to climb determined, finite elements analysis was conducted;
a 45-degree slope and reach a speed of 2 km/h on flat however, the minimum safety coefficient was 0.22 as seen
terrain. As a result of calculation, the selected power engine
was assigned a torque value of about 900 nm, and the
IJISRT17NV89 www.ijisrt.com 202
Volume 2, Issue 11, November 2017 International Journal of Innovative Science and Research Technology
ISSN No:-2456 2165
in figure 6, and there was a need to make revisions in the
subframe sheet metal parts.
Figure 8. Subframe Plowing End Analyses
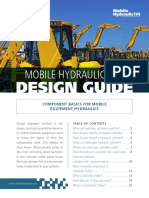
Figure 7. Subframe Analysis (top part)
Later on, forces that it would endure during digging were
Maximum displacement of the top part of the subframe was applied on the dozer blade which would play the role of
calculated as 11.4 mm. As a result of the analysis, it was supporting the mini excavator in addition to plowing, and
determined that the material was week as the safety analyses were carried out (figure 8). The subframe was
coefficients were lower than 1 in the regions shown in red in applied the forces that it would be exposed to in operational
the measurements taken from various points on the frame conditions, and the behaviors of the parts against these
(figure 7). In order to strengthen the red zones with safety forces were examined. Revisions were made for the zones
coefficients lower than 1 in the bottom part of the subframe, on the subframe with safety coefficients of lower than 1, the
the previously 6-mm thickness of the bottom sheet metal analyses on the subframe were completed, and it was made
was increased to 8 mm. Moreover, sheet metal support ready for production.
pieces were added to the joint places between the bottom
sheet and the side sheets, and the subframe was provided B. Upper frame finite elements analyses
with toughness. As a result of the analysis of the subframe,
when the test was repeated after making the necessary Like the case in the analysis of the subframe of the
revisions, it was found that the maximum displacement in excavator, during the analysis of the upper frame, the parts
the part was 0.61 mm. As a result of applying forces after that would not affect the results of finite elements analysis
the increased sheet metal thicknesses and added materials, it were removed from the setup and the analysis of the upper
was seen that the safety coefficients of the subframe had a frame was simplified. Before applying forces on the upper
minimum of 3.4. The design was forced to rotate based on frame, the model was made ready by assigning st-37 to steel
the torque value of the hydraulic motor with the central gear plates and 4140 tempered steel to mills and bearing parts as
in the center of the design, and it was found that the factor materials. Finite elements analysis was carried out by
of safety was approximately 4.5, and the maximum applying the forces that the upper frame would endure, the
displacement was 0.004. After the torque applied on the maximum breakout force of the digging bucket part, the
bearing sheet metal on which the power engine was arm-boom-bucket weight and the weight of the upper frame
connected, it was seen that the bearing sheet metal had a on the frame. The minimum safety coefficient was found as
displacement of approximately 0.012 mm and a minimum 3.34. Based on the measurements taken from different
safety coefficient of 6.84 (figure 8). points on the model, the model was found durable against
the forces applied onto it.
IJISRT17NV89 www.ijisrt.com 203
Volume 2, Issue 11, November 2017 International Journal of Innovative Science and Research Technology
ISSN No:-2456 2165
analysis. As a result of the analyses, the minimum safety
coefficient in the model was calculated as 1.02.
As a result of the stresses applied, the maximum
displacement of the digging mechanism was calculated as
3.3 mm. The stresses created on the digging mechanism by
the bucket during sweeping operations with the side of the
bucked while digging were investigated on the model. When
the model was examined as a result of the applied stresses,
the minimum safety coefficient was found to be 1.37, and
the maximum displacement was found to be 4.7 mm (figure
10).
Figure 9. Upper frame analysis
As a result of the forces applied on the model, the maximum
displacement was found as 0.3 mm. When the forces applied
by the bucket on the upper frame during the sweeping
movement in digging operations by the bucket, the
minimum safety coefficient was found as 1.2 and the
maximum displacement was found as 0.36 mm.
Consequently, when the maximum forces that the upper
frame may be exposed to were examined via the finite
elements analysis, it was observed that the upper frame
showed sufficient durability against forces in its pre- Figure 10. Stresses imposed on the model
production stage, and it was determined that the design was
ready for production.
C. Arm, boom and bucket finite elements analyses Based on the finite elements analysis of the arm, boom and
bucket pieces, it was observed that the digging mechanism
had sufficient durability, and it was ready for production.
In the finite elements analysis of the mini excavator, the
forces that would be imposed on the digging mechanism
(arm, boom and bucket) of the machine were implemented IV. RESULTS AND DISCUSSION
on the model in the design environment, and the behavior of
these parts during operation were examined. As in the cases
of subframe and upper frame analyses, the parts that would This study presented the design of a mini excavator with a
not affect the result of finite elements analyses were weight of 1000-1500 kg, power of 10-12 hp and pressure of
removed and the analysis model was simplified. After 175 bar, as well as the analysis of the design. The study
simplification, materials were assigned to the arm, boom consisted of three stages as: designing the mini excavator
and bucket parts. Again, st-37 was assigned to the metal and drawing it in three dimensions in the computer
sheet parts and 4140 tempered steel was assigned to the environment, installment of the machine in the design
mills and bearings. The bucket part was designed to endure environment, and conducting analyses. The results of the
a maximum of 950-1000 kg-f breakout force during digging, study may be listed as the following;
and forces were applied to the digging mechanism based on The study designed a mini excavator with a weight of
this design. Our analysis model was obtained by calculation 1000-1500 kg, power of 10-12 hp and pressure of
and application of the suitable mesh size for the parts that 175 bar.
constituted the digging mechanism via convergence
IJISRT17NV89 www.ijisrt.com 204
Volume 2, Issue 11, November 2017 International Journal of Innovative Science and Research Technology
ISSN No:-2456 2165
A rubber pallet with a standard of 180x72x37 (180: In order to strengthen the red zones in the bottom of
pallet width, 72: pallet gear step and 37: number of the subframe with safety coefficients lower than 1,
links) was chosen for the design. the previously 6-mm thickness of the sheet metals
was increased to 8 mm.
Two ctm1016 cf brzv 100 orbit power engines with
brakes were selected. The speed of the power engine The minimum safety coefficient in the upper frame
changed in the range of 2 km/h-1.6 km/h. The was obtained as 3.34. The measurements taken from
displacement volume of the engine was 100 cm3/rev. different points on the model showed that the model
For the power engine, the maximum values of 175 was durable against the forces applied.
bar pressure, 1120 nm torque, 40 l/min flow and 65
rpm revolution rate were used. A chain gear that was The bucket piece was designed to be exposed to a
suitable for the ansi metric standards and 72 mm of maximum breakout force of 950-1000 kg-f during the
step length was selected. digging operations of the mini excavator, and forces
were applied on the digging mechanism accordingly.
A casappa lvp 30 axial-piston hydraulic pump with a
displacement rate of 28.8 cm3/rev was selected by As a result of the finite elements analysis on the arm,
calculating the flow and pressure values needed by boom and bucket parts, it was observed that the
the orbit bmr-200 hydraulic engine with a digging mechanism had sufficient durability and it
displacement rate of 200.9 ml/rev. For the hydraulic was ready for production.
pump, the study used a pressure of 125 bar, In a future study, the necessary analyses will be made on the
revolution rate of 2050 rpm, displacement rate of 22 excavator designed and analyzed here, and the excavator
cm3/rev, power value of 7.4 kw and torque value of will be produced.
44 nm.
A kubota d722-e3b 3-cylinder liquid-cooled diesel V. ACKNOWLEDGMENT
engine with a maximum revolution rate of 3600 rpm
and engine power of 14.9 kw was selected in the This study was supported by tbitaks 1005 national novel
study. The design used 2050 rpm and 7.4 kw power. ideas and products research support program. The authors
As the battery for the diesel engine, the design would like to thank tubitak. (project no: 215 m 926).
included a 390 a sae battery with a voltage of 12v
and capacity of 42ah.
Suction line hose diameter was 1 / 1/4 inches, return REFERENCES
line hose diameter was 1 inch, the diameter of the
pressure line of the valve block from the pump was [1]. E.c. orlemann, power sholvels: the worlds mightiest
inches and the diameter of the working line from the mining and construction excavators, motor books
valve block to the receiver was 3/8 inches. international, 2003, pp. 101-102.
[2]. S.e. salcudean, s. Tafazoli, p.d. lawrence, i. Chau:
The boom, arm and bucket were designed such that impedance control of a teleoperated mini excavator,
during digging, if the operation of breaking will be advanced robotics icar 97 proceedings 8th international
made with the bucket the maximum breakout force conference, monterey, california, u.s.a., 1997, pp. 19-
would be about 950 kg, and if the operation will be 25.
made with the arm piece, it would be about 500 kg-f. [3]. B.p. patel, j.m. prajapati: evaluation of bucket capacity,
digging force calculation and force analysis of mini
The machine is able to rotate towards right or left by
hydraulic backhole excavator, machine design, 2012,
73 degrees without the need for the swing movement
vol. 4, no. 1, pp. 59-66.
with the help of the link and a hydraulic cylinder.
[4]. D. Wang, c. Guan, s. Pan, m. Zhang, x. Lin:
As the material for sheet metal, bearings and mills in performance analysis of hdyraulic excavator powertrain
the subframe, the study used st-37 and 4140 hybridization, automation in construction, 2009, vol.
tempered steel, which are easily accessible in the 18, no. 3, pp. 249-257.
metal industry. [5]. T. Lin, q. Wang, b. Hu, w. Gong: research on the
energy regeneration systems for hybrid hydraulic
The power engines were selected so that the machine excavators, automation in construction, 2010, vol.19,
would be able to climb a slope of 45 degrees and pp. 1016-1026.
reach a speed of 2 km/h on flat terrain. As a result of [6]. L. Solazzi: design of aluminum boom and arm for an
calculations, the torque value of the selected power excavator, journal of terramechanics, 2010, vol. 47, pp.
engine was chosen as about 900 nm and the analyses 201-207.
were run accordingly. [7]. E. Budny, m. Chlosta, w. Gutkowski: load-independent
As the minimum safety coefficient was found as 0.22 control of a hydraulic excavator, automation in
in the analyses, there was a need for revision in the construction, 2003, vol. 12, pp. 245-254.
subframe parts. [8]. S-u. Lee, p.h. chang: control of heavy-duty robotic
excavator using time delay control with integral sliding
IJISRT17NV89 www.ijisrt.com 205
Volume 2, Issue 11, November 2017 International Journal of Innovative Science and Research Technology
ISSN No:-2456 2165
surface, control engineering practice, 2002, vol. 10, pp.
697-711.
[9]. S. Tafazoli, p.d. lawrence, s.e. salcudean, d. Chan, s.
Bachmann, c.w. de silva: parameter estimation and
actuator friction analysis for mini excavator,
proceedings of the 1996 ieee international conference
on robotic and automatio, minneapolis, minnesota,
1996, pp. 329-334.
[10]. B. P. Patel, j.m. prajapati: soil-tool interaction as a
review for digging operation of mini hydraulic
excavator, international journal of engineering science
and technology, 2011, vol. 3, no.2, pp. 894-901.
[11]. S. Tafazoli, s.e. salcudean, k. Hashtrudi-zaad, p.d.
lawrence: impedance control of a teleoperated
excavator, ieee transactions on control systems
technology, 2002, vol. 10, no.3, pp. 355-367.
[12]. d.j. edwards, g.d. holt, f.c. harris: maintenance
management of heavy duty plant and equipment,
chandos publishing, oxford, 1998.
[13]. D.j. edwards, g.d: holt: case study analysis of risk from
using excavators as cranes, automation in
construction, 2010, vol. 19, pp. 127-133.
[14]. R. Ding, b. Xu, j. Zhang, m. Cheng: self-tuning
pressure-feedback control by pole placement for
vibration reduction of excavator with independent
metering fluid power system, mechanical syatems and
signal processing, 2017, vol. 92, pp. 86-106.
[15]. E. Budny, m. Chlosta m., w. Gutkowski: load
independent control of a hdraulic excavator, automation
in construction, 2003, vol. 12, pp. 245-254.
[16]. H. Sar, y. Ercan: ekskavatrlerin hidrolik
tasarmlarna esas olacak temel parametrelerin
belirlenmesi ve teknik ve ekonomik ynden optimum
hidrolik elemanlarn seimi, 4. Ulusal hidrolik-
pnmatik kongesi, pp. 337-352, 2005.
[17]. P.h. chang, s-j lee: a straight-line motion tracking
control of hydraulic excavator system. Mechatronics,
2002, vol. 122, pp. 119-138.
[18]. H. Ouyang: a hybrid control approach for pole
assignment to second-order asymmetric systems, mech.
Syst. Sig. Process. 2011, vol. 25, no.1, pp. 123132.
[19]. J. Smoczek: fuzzy crane control with sensorless
payload deflection feedback for vibration reduction,
mech. Syst. Sig. Process. 2014, vol. 46, no.1, pp. 7081.
[20]. R. Ding, b. Xu, j. Zhang, m. Cheng: self-tuning
pressure feedback control by pole placement for
vibration reduction of excavator with independent
metering fluid power system, mechanical, systems and
signal processing, 2017, vol. 92, pp. 86-106.
IJISRT17NV89 www.ijisrt.com 206
You might also like
- ZL50H Manual PDFDocument77 pagesZL50H Manual PDFMasoodKan75% (4)
- Backhoe Loader Finite Element AnalysisDocument55 pagesBackhoe Loader Finite Element AnalysisPrabhakar Purushothaman100% (2)
- GR-130EX: Hydraulic Rough Terrain CraneDocument16 pagesGR-130EX: Hydraulic Rough Terrain CraneDenny AjaNo ratings yet
- ForteJetOVDocument38 pagesForteJetOVJulio Cesar Lugo Ruiz100% (3)
- Design and Optimation of Arm ExcavatorDocument6 pagesDesign and Optimation of Arm Excavatoranon_664850107No ratings yet
- Hydraulic CylinderDocument40 pagesHydraulic CylinderYandapalli Sai ramNo ratings yet
- Scorpion User ManualDocument29 pagesScorpion User ManualElmer RafaelNo ratings yet
- 119.PDF Pump ConcreteDocument7 pages119.PDF Pump Concreterahul khanNo ratings yet
- Design of Post Hole Digger Machine IJERTV3IS030320Document5 pagesDesign of Post Hole Digger Machine IJERTV3IS030320Ajit KalasaitNo ratings yet
- Study of Crane Hook Having Trapezoidal Section by FiniteDocument3 pagesStudy of Crane Hook Having Trapezoidal Section by FiniteYahaira Ruiz OrtegaNo ratings yet
- 9.optimisation in Design of Mechanical Scissor LiftDocument5 pages9.optimisation in Design of Mechanical Scissor LiftAmit GhadeNo ratings yet
- Telescopic BoomDocument4 pagesTelescopic BoomLoc NguyenNo ratings yet
- Disclosure To Promote The Right To InformationDocument15 pagesDisclosure To Promote The Right To InformationKailtech Lab IndoreNo ratings yet
- Hydraulic SystemDocument12 pagesHydraulic SystemMarijan LesičakNo ratings yet
- Asme SEC 8 DIV1 IntroduccionDocument28 pagesAsme SEC 8 DIV1 Introduccionleonel lopezNo ratings yet
- 3 PTL MBD SimulationDocument8 pages3 PTL MBD SimulationSumit SheoranNo ratings yet
- Stress Analysis of Tractor Trolley Chassis With Effect of Various Thickness and Design Optimization For Weight Reduction Ijariie1894Document7 pagesStress Analysis of Tractor Trolley Chassis With Effect of Various Thickness and Design Optimization For Weight Reduction Ijariie1894anil sajjanarNo ratings yet
- Linkage in Farm MachineryDocument4 pagesLinkage in Farm MachineryRehan RashidNo ratings yet
- Roller Conveyor Chain AttachmentsDocument19 pagesRoller Conveyor Chain AttachmentsRichard VachonNo ratings yet
- Hydrualics Design DataDocument2 pagesHydrualics Design DataKeith AdminNo ratings yet
- Pipe Fittings and Port AdaptersDocument26 pagesPipe Fittings and Port AdaptersdekgaleNo ratings yet
- Problem Solving: Scissor Lift Mechanism: Learning ObjectiveDocument2 pagesProblem Solving: Scissor Lift Mechanism: Learning ObjectiveDILIP kesavan100% (1)
- Mobile Hydraulic Tips: Component Basics For Mobile Equipment HydraulicsDocument16 pagesMobile Hydraulic Tips: Component Basics For Mobile Equipment HydraulicsSamik MukherjeeNo ratings yet
- EMC ActuatorsDocument80 pagesEMC ActuatorsnageshNo ratings yet
- Report - Hydraulic Pipe Bending MachineDocument2 pagesReport - Hydraulic Pipe Bending MachinedhirajNo ratings yet
- Agricultural Trailer - SpecificationsDocument11 pagesAgricultural Trailer - SpecificationsEdsel Jay RaperNo ratings yet
- 2 Hydraulic Cylinder EKZDocument25 pages2 Hydraulic Cylinder EKZthanhNo ratings yet
- Lubrication Layer Properties During Concrete PumpingDocument10 pagesLubrication Layer Properties During Concrete PumpingsaiNo ratings yet
- Buckling Análysis of Telescopic Boom PDFDocument7 pagesBuckling Análysis of Telescopic Boom PDFAndonny Daq DelgadoNo ratings yet
- Air Spring For Rails PDFDocument52 pagesAir Spring For Rails PDFRavi KaushikNo ratings yet
- General Specifications of Hydraulic CylindersDocument8 pagesGeneral Specifications of Hydraulic CylindersmehrashashankNo ratings yet
- Hydraulic CylindersDocument7 pagesHydraulic Cylinderspacopil34No ratings yet
- MC 451 Lecture 7-2020 PDFDocument108 pagesMC 451 Lecture 7-2020 PDFChilumba ChisengaNo ratings yet
- Master Cylinder DesignDocument4 pagesMaster Cylinder DesignAtifNo ratings yet
- Position Control Hydraulic Cylinder With MicrocontrollerDocument15 pagesPosition Control Hydraulic Cylinder With Microcontrolleramin342No ratings yet
- 2 Wheel Drive Forklift For Industry WarehousesDocument5 pages2 Wheel Drive Forklift For Industry WarehousesSuyog MhatreNo ratings yet
- ME 1305 Applied Hydraulics and PneumaticsDocument6 pagesME 1305 Applied Hydraulics and PneumaticsSuresh VeluNo ratings yet
- NBC Training Report - Ball Bearing DivisionDocument51 pagesNBC Training Report - Ball Bearing DivisionBrandon Johnson100% (6)
- A-313 - 98Document7 pagesA-313 - 98José Ramón GutierrezNo ratings yet
- Reich 0001 PDFDocument87 pagesReich 0001 PDFYordys Domínguez RodríguezNo ratings yet
- Jurnal Analisa Kegagalan Pada Rangka TrukDocument13 pagesJurnal Analisa Kegagalan Pada Rangka TrukBaskara Surya WidagdoNo ratings yet
- Fabrication of Conveyor Belt With Auto Pick and Place and Digital CounterDocument3 pagesFabrication of Conveyor Belt With Auto Pick and Place and Digital CounterUmarani DursethiNo ratings yet
- Plummer Block Catalogue PDFDocument36 pagesPlummer Block Catalogue PDFMadhava PadiyarNo ratings yet
- Diploma in Mechanical Engineering: Hydraulic Fork LiftDocument43 pagesDiploma in Mechanical Engineering: Hydraulic Fork Liftmanoj phadtare100% (1)
- Slitter Plant: Prepared By: Vedant SankheDocument20 pagesSlitter Plant: Prepared By: Vedant SankheVedant SankheNo ratings yet
- SteelDocument28 pagesSteelAshfaq SaudagarNo ratings yet
- Installing Machine Tools: Here's What To ConsiderDocument1 pageInstalling Machine Tools: Here's What To ConsiderMobile SunNo ratings yet
- Hydraulic Cartridge Logic Valves - Hydraulic ValveDocument2 pagesHydraulic Cartridge Logic Valves - Hydraulic Valveasif bashaNo ratings yet
- S49-800-1S Vibro SeparatorDocument4 pagesS49-800-1S Vibro SeparatorBudi HermawanNo ratings yet
- Hydraulic Gear Pumps Market 2016 Global Industry SizeDocument8 pagesHydraulic Gear Pumps Market 2016 Global Industry SizefullkuleNo ratings yet
- Concrette Pump STD Main PumpDocument3 pagesConcrette Pump STD Main PumpHidayatNo ratings yet
- CNC Notching and Marking Machines: at 820 E CNC - at 820 E HD CNCDocument2 pagesCNC Notching and Marking Machines: at 820 E CNC - at 820 E HD CNCdesetekNo ratings yet
- 081 - ME8594, ME6505 Dynamics of Machines - Notes 4 PDFDocument99 pages081 - ME8594, ME6505 Dynamics of Machines - Notes 4 PDFKrish NarayananNo ratings yet
- Appendix 1 - Technical SpecificationDocument119 pagesAppendix 1 - Technical SpecificationMarleneLopes100% (1)
- Design of Material Handling Equipments (Use of Approved Data Book Is Permitted) LTPC 3 0 0 3 1. Materials Handling Equipment 5Document1 pageDesign of Material Handling Equipments (Use of Approved Data Book Is Permitted) LTPC 3 0 0 3 1. Materials Handling Equipment 5Nantha Kumar100% (1)
- J Tws 2014 09 009 PDFDocument9 pagesJ Tws 2014 09 009 PDFHisham SyedNo ratings yet
- Hydraulic PipingDocument1 pageHydraulic Pipingpandunugraha04100% (1)
- GMD 16 20 Operators ManualDocument80 pagesGMD 16 20 Operators ManualVladimir ArsicNo ratings yet
- Akumulator BrosurDocument17 pagesAkumulator BrosurFaruk MirasyediNo ratings yet
- Modelling and Analysis of Excavator Arm: B. Raghu, B. Rajesh, CH. Swathi, D. Rishikesh, G. Abdul KadirDocument21 pagesModelling and Analysis of Excavator Arm: B. Raghu, B. Rajesh, CH. Swathi, D. Rishikesh, G. Abdul KadirShiee ShieeNo ratings yet
- Design and Analysis of 22 Ton Class Excavator Swing Braking SystemDocument6 pagesDesign and Analysis of 22 Ton Class Excavator Swing Braking SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Motor Truck Logging Methods Engineering Experiment Station Series, Bulletin No. 12From EverandMotor Truck Logging Methods Engineering Experiment Station Series, Bulletin No. 12No ratings yet
- Teaching in “The “Land of Smile”: Anecdote of Filipino Substitute Teachers in ThailandDocument5 pagesTeaching in “The “Land of Smile”: Anecdote of Filipino Substitute Teachers in ThailandInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Proposed Model for Fainting People Detection Using Media Pipe TechnologyDocument4 pagesA Proposed Model for Fainting People Detection Using Media Pipe TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Evaluating the Performance of Vapor Compression Cycle by Adding NanoparticleDocument12 pagesEvaluating the Performance of Vapor Compression Cycle by Adding NanoparticleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Exploring Well-being in College Students: The Influence of Resilience and Social SupportDocument11 pagesExploring Well-being in College Students: The Influence of Resilience and Social SupportInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Implementation of Total Productive Maintenance on Frame Welding Machine Maintenance Using the Overall Equipment Effectiveness (OEE) Method at PT Electronics Components IndonesiaDocument10 pagesImplementation of Total Productive Maintenance on Frame Welding Machine Maintenance Using the Overall Equipment Effectiveness (OEE) Method at PT Electronics Components IndonesiaInternational Journal of Innovative Science and Research Technology100% (1)
- Automatic Essay Scoring with Context-based Analysis with Cohesion and CoherenceDocument8 pagesAutomatic Essay Scoring with Context-based Analysis with Cohesion and CoherenceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Clinical Approach to Advanced Mantle Cell Lymphoma: A Detailed Case AnalysisDocument5 pagesClinical Approach to Advanced Mantle Cell Lymphoma: A Detailed Case AnalysisInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Design Information Security in Electronic-Based Government Systems Using NIST CSF 2.0, ISO/IEC 27001: 2022 and CIS ControlDocument8 pagesDesign Information Security in Electronic-Based Government Systems Using NIST CSF 2.0, ISO/IEC 27001: 2022 and CIS ControlInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Role of Haematological Indices, Interleukin-10, Tumour Necrosis Factor and Vascular Endothelial Growth Factor on Gastric Ulcer Healing in Obese Wistar Rats: Effect of Garlic OilDocument13 pagesRole of Haematological Indices, Interleukin-10, Tumour Necrosis Factor and Vascular Endothelial Growth Factor on Gastric Ulcer Healing in Obese Wistar Rats: Effect of Garlic OilInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Temperature Call Alert to Prevent Child Death from Heatstroke in Smart Car using IoTDocument12 pagesTemperature Call Alert to Prevent Child Death from Heatstroke in Smart Car using IoTInternational Journal of Innovative Science and Research Technology100% (2)
- Teacher Humor Style and Attention Span of Grade 7 StudentsDocument5 pagesTeacher Humor Style and Attention Span of Grade 7 StudentsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Effects of Methanol Extract of Celery (Apium graveolens) Leaf on Ethanol-Induced Left Ventricular Changes in Wistar RatsDocument7 pagesEffects of Methanol Extract of Celery (Apium graveolens) Leaf on Ethanol-Induced Left Ventricular Changes in Wistar RatsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Making and Assessing an Antibacterial Cream with Dalbergia Sissoo Leaf ExtractDocument9 pagesMaking and Assessing an Antibacterial Cream with Dalbergia Sissoo Leaf ExtractInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Conceptualized Fusion Reactor based on Gas Turbine with High Temperature CO2Document7 pagesConceptualized Fusion Reactor based on Gas Turbine with High Temperature CO2International Journal of Innovative Science and Research TechnologyNo ratings yet
- The Rise of Advanced VTS/VTMS SystemsDocument14 pagesThe Rise of Advanced VTS/VTMS SystemsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- ALBULARYO: Advanced Learning for Botanical Understanding, Leveraging Artificial Recognition using Convolutional Neural NetworksDocument5 pagesALBULARYO: Advanced Learning for Botanical Understanding, Leveraging Artificial Recognition using Convolutional Neural NetworksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Human-Computer Interaction in Cloud SystemsDocument6 pagesHuman-Computer Interaction in Cloud SystemsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Comparative Cognitive Performance of 60-Year-Old Asian and Western Pilots on the CogScreen Test: A Cross-Sectional StudyDocument6 pagesComparative Cognitive Performance of 60-Year-Old Asian and Western Pilots on the CogScreen Test: A Cross-Sectional StudyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Thickness CipherDocument3 pagesThickness CipherInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Promotion and Brand Awareness Analysis of Purchase Intention Sharp Brand Smart TVs in Surabaya TimurDocument7 pagesPromotion and Brand Awareness Analysis of Purchase Intention Sharp Brand Smart TVs in Surabaya TimurInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Digital Literacy and Critical Thinking Skills Among Grade 5 LearnersDocument4 pagesDigital Literacy and Critical Thinking Skills Among Grade 5 LearnersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Role of Environmental Accounting in Promoting Sustainable Business Practices A Case Study of Turkana County, KenyaDocument7 pagesRole of Environmental Accounting in Promoting Sustainable Business Practices A Case Study of Turkana County, KenyaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Optimizing Textual Regulation Interpretation for Maximum ImpactDocument5 pagesOptimizing Textual Regulation Interpretation for Maximum ImpactInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Expanding Attack Surface: Securing AI and Machine Learning Systems in Security OperationsDocument8 pagesThe Expanding Attack Surface: Securing AI and Machine Learning Systems in Security OperationsInternational Journal of Innovative Science and Research Technology100% (1)
- The Multinational Telecommunication Companies as a Moderator to Achieve Sustainable Development Considering Standard of Living and Digital Education in Sri LankaDocument11 pagesThe Multinational Telecommunication Companies as a Moderator to Achieve Sustainable Development Considering Standard of Living and Digital Education in Sri LankaInternational Journal of Innovative Science and Research Technology100% (1)
- Human Resource Functions: Examining Insights from ABC Research OrganizationDocument9 pagesHuman Resource Functions: Examining Insights from ABC Research OrganizationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of Store Atmosphere and Customer Experience on Consumer Purchasing Decisions of KFC Wahidin GresikDocument5 pagesThe Impact of Store Atmosphere and Customer Experience on Consumer Purchasing Decisions of KFC Wahidin GresikInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- An Appraisal of Employable Content of the National Diploma in Architectural Technology Program in North East NigeriaDocument5 pagesAn Appraisal of Employable Content of the National Diploma in Architectural Technology Program in North East NigeriaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of the Commercial Agriculture Credit Scheme (CACS) on the Agricultural Economy of Nigeria and its Total Output (2015-2019)Document8 pagesThe Impact of the Commercial Agriculture Credit Scheme (CACS) on the Agricultural Economy of Nigeria and its Total Output (2015-2019)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Teacher-Induced Academic Stress: Predicting Eating Behavior Problems in College StudentsDocument8 pagesTeacher-Induced Academic Stress: Predicting Eating Behavior Problems in College StudentsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Manual Martillo Atlas Copco 2200 7000 3390500505Document3 pagesManual Martillo Atlas Copco 2200 7000 3390500505Cesar QuintanillaNo ratings yet
- Moog Serioes Flotork Rotary Actuators Catalogue en Usa202008Document64 pagesMoog Serioes Flotork Rotary Actuators Catalogue en Usa202008Edgar Allende ChavezNo ratings yet
- Agma Iso 10064-1Document34 pagesAgma Iso 10064-1Mohammad Ali Taghdiri100% (3)
- Back To Iiasics, ... : Design Involute GearDocument11 pagesBack To Iiasics, ... : Design Involute Gearabdul rachim100% (1)
- Motor-Bomba ProlepenteDocument8 pagesMotor-Bomba ProlepenteRichards Villalobos RojasNo ratings yet
- Transfer Case NVG 246Document342 pagesTransfer Case NVG 246Cesar Augusto GalloNo ratings yet
- Warning: Section 25 - Mechanical Front Axle - Chapter 1 10Document32 pagesWarning: Section 25 - Mechanical Front Axle - Chapter 1 10rodrigoNo ratings yet
- Pons MED03 Tolerances E4.13Document68 pagesPons MED03 Tolerances E4.13Elliot SmithNo ratings yet
- 07a6ec05 Designofmachinemembers IIDocument11 pages07a6ec05 Designofmachinemembers IIzahid_polyNo ratings yet
- Company HistoryDocument15 pagesCompany HistorySuganthan DuraiswamyNo ratings yet
- MESYS Shaft CalculationDocument28 pagesMESYS Shaft CalculationZoebairNo ratings yet
- SHELL Omala Oils, Premium Quality Industrial Gear OilsDocument3 pagesSHELL Omala Oils, Premium Quality Industrial Gear OilsnanjayNo ratings yet
- TranscoDocument4 pagesTranscoYusuf DabhiyaNo ratings yet
- 2011 2013 Mercury 150 Manual Ber2koDocument584 pages2011 2013 Mercury 150 Manual Ber2koChris ArampatzisNo ratings yet
- Automobile PDFDocument58 pagesAutomobile PDFjaycee68No ratings yet
- s91 Operator ManualDocument199 pagess91 Operator Manualjuliocesar.caNo ratings yet
- What Is DifferentialDocument9 pagesWhat Is Differentialprem sagarNo ratings yet
- Catalog Reductor Armonic Cu RulmentiDocument20 pagesCatalog Reductor Armonic Cu RulmentiAkeidirNo ratings yet
- Flexview InstallationDocument25 pagesFlexview InstallationGeorgios MariolisNo ratings yet
- 793 793b 793cDocument8 pages793 793b 793cJulio Elias Mayta RamosNo ratings yet
- System OperationDocument82 pagesSystem OperationAntonio MejicanosNo ratings yet
- CL 7000 144126 Parts List PDFDocument3 pagesCL 7000 144126 Parts List PDFYash PandyaNo ratings yet
- Catalog Parts 1Document171 pagesCatalog Parts 1Fernanda AndradeNo ratings yet
- ZF6HP26 A PDFDocument5 pagesZF6HP26 A PDFJesus UrrietaNo ratings yet
- CPP Energy Generation Using Speed Breaker LDocument39 pagesCPP Energy Generation Using Speed Breaker Latharvsalunkhe6105No ratings yet
- Gearbox Parts ManualDocument57 pagesGearbox Parts ManualRELOJERIANo ratings yet