Download as docx, pdf, or txt
You might also like
- ASI4518R39v06 DatasheetDocument3 pagesASI4518R39v06 DatasheetIgnacio Garcia LopezNo ratings yet
- Bode Plot: Example 6: Step 1: Rewrite The Transfer Function in Proper FormDocument3 pagesBode Plot: Example 6: Step 1: Rewrite The Transfer Function in Proper FormNabaz MuhamadNo ratings yet
- Bode PlotDocument19 pagesBode Plotkoolking786No ratings yet
- Chapter 16 Antenna PDFDocument7 pagesChapter 16 Antenna PDFCarmela Elaco VillanuevaNo ratings yet
- 50+ MATLAB Projects For Engineering StudentsDocument5 pages50+ MATLAB Projects For Engineering StudentsaamyaNo ratings yet
- Bode Plot ExamplesDocument22 pagesBode Plot ExamplesMarko AgassiNo ratings yet
- Bode PlotDocument19 pagesBode PlotyacobaschalewNo ratings yet
- Analog Integrated CircuitsDocument47 pagesAnalog Integrated CircuitsDan GoleaNo ratings yet
- Ee122 Freq Resp RevnotesDocument6 pagesEe122 Freq Resp RevnotesMicro EmissionNo ratings yet
- Very Good Bode Plot TutorialDocument5 pagesVery Good Bode Plot TutorialsukusportyNo ratings yet
- Lesson 3 - Bode - PlotsDocument11 pagesLesson 3 - Bode - PlotsHosea MuchiriNo ratings yet
- Bode Plot PDFDocument16 pagesBode Plot PDFmutuaNo ratings yet
- Bode Plot: Example 1: Step 1: Rewrite The Transfer Function in Proper FormDocument16 pagesBode Plot: Example 1: Step 1: Rewrite The Transfer Function in Proper Formabbasmiry83No ratings yet
- Bodeovi DijagramiDocument21 pagesBodeovi DijagramiSedin MurticNo ratings yet
- Bode Plots (Note) PDFDocument5 pagesBode Plots (Note) PDFTejaswi J DamerlaNo ratings yet
- 13 Freq Response AICDocument84 pages13 Freq Response AICDavid BayuNo ratings yet
- Bode Plot: Example 1Document6 pagesBode Plot: Example 1Sharmaine IgnacioNo ratings yet
- Frequency Response and Bode Plots: 1.1 PreliminariesDocument20 pagesFrequency Response and Bode Plots: 1.1 PreliminariesAmresh VarshneyNo ratings yet
- Chapter 12 Bode PlotsDocument39 pagesChapter 12 Bode PlotsMayar Magdy MorkosNo ratings yet
- DynamixDocument61 pagesDynamixtrko5354No ratings yet
- 14.4 Bode Plots: Frequency Response 589Document12 pages14.4 Bode Plots: Frequency Response 589Luis Lizana100% (1)
- 333 Answers 2009 10 Q1 FinalDocument3 pages333 Answers 2009 10 Q1 Finalaku011987No ratings yet
- S Domain AnalysisDocument9 pagesS Domain Analysisfaisal140No ratings yet
- Transfer Functions and Bode PlotsDocument8 pagesTransfer Functions and Bode PlotsChakravarthi VakalapudiNo ratings yet
- Bode Plot: Example 5: Step 1: Rewrite The Transfer Function in Proper FormDocument3 pagesBode Plot: Example 5: Step 1: Rewrite The Transfer Function in Proper FormNabaz MuhamadNo ratings yet
- 10 1 1 112 2812Document49 pages10 1 1 112 2812Abdulazeez Ayomide AdebimpeNo ratings yet
- Rules For Making Bode Plots: Term Magnitude PhaseDocument4 pagesRules For Making Bode Plots: Term Magnitude PhaseYgor GonzalezNo ratings yet
- Introduction To Bode Plot: P S S Z S K S HDocument19 pagesIntroduction To Bode Plot: P S S Z S K S Halexis_buenaflorNo ratings yet
- Linear Systems 1 ExperimentDocument7 pagesLinear Systems 1 ExperimentYousif AlmashhadyNo ratings yet
- Bode PlotsDocument13 pagesBode PlotsNazlia BaharudinNo ratings yet
- Bode Plot: Example 2: Step 1: Rewrite The Transfer Function in Proper FormDocument3 pagesBode Plot: Example 2: Step 1: Rewrite The Transfer Function in Proper FormNabaz MuhamadNo ratings yet
- EE 4130lab7Document6 pagesEE 4130lab7kattepoguNo ratings yet
- CS Unit-3Document16 pagesCS Unit-3auchthram143No ratings yet
- Bode Plots OverviewDocument71 pagesBode Plots OverviewibinhabeebNo ratings yet
- Lec 23Document22 pagesLec 23Khajavali ShaikNo ratings yet
- Bode PlotsDocument7 pagesBode PlotsHania UmarNo ratings yet
- Lect 9-Frequency-Response-techniques 1Document68 pagesLect 9-Frequency-Response-techniques 1Tarik ZiadNo ratings yet
- Lab 8 Filters in MATLAB 1zk5b0wDocument7 pagesLab 8 Filters in MATLAB 1zk5b0wNadzmiFauziNo ratings yet
- Poles and Zeros of Transfer FunctionDocument34 pagesPoles and Zeros of Transfer FunctionRyan VasquezNo ratings yet
- Bode Plot: Example 3: Step 1: Rewrite The Transfer Function in Proper FormDocument2 pagesBode Plot: Example 3: Step 1: Rewrite The Transfer Function in Proper FormNabaz MuhamadNo ratings yet
- Lec 6: Gain, Phase Margin, Designing With Bode Plots, CompensatorsDocument10 pagesLec 6: Gain, Phase Margin, Designing With Bode Plots, CompensatorszakiannuarNo ratings yet
- Part 8Document27 pagesPart 8TwinkelsNo ratings yet
- Solutions/Hints For The Problems: 1. Traffic Safe City (Points: 300)Document6 pagesSolutions/Hints For The Problems: 1. Traffic Safe City (Points: 300)arundobriyalNo ratings yet
- Bode RulesDocument5 pagesBode RulesAnonymous kbFn5INo ratings yet
- Wave Shaping SynthesisDocument12 pagesWave Shaping SynthesisVadim Drokov100% (1)
- Control Engineering WorkDocument20 pagesControl Engineering WorkWilsonNo ratings yet
- Asymptotic Bode PlotDocument8 pagesAsymptotic Bode Plotmaha malikNo ratings yet
- Whatis Frequency Response?Document32 pagesWhatis Frequency Response?Arshiya Kousar MNo ratings yet
- Bode PlotDocument7 pagesBode Plotnabilo20No ratings yet
- Bode PlotDocument22 pagesBode PlotEr Akhilesh SinghNo ratings yet
- Derivation of Root Locus Rules: ExamplesDocument20 pagesDerivation of Root Locus Rules: ExamplesBuvanesh Buvi VnrNo ratings yet
- Filters 2Document60 pagesFilters 2Nguyễn Hoàng KhaNo ratings yet
- Bode Plot: Example 4: Step 1: Rewrite The Transfer Function in Proper FormDocument2 pagesBode Plot: Example 4: Step 1: Rewrite The Transfer Function in Proper FormNabaz MuhamadNo ratings yet
- 07 Poles and Zeros of Transfer FunctionDocument33 pages07 Poles and Zeros of Transfer FunctionRyan VasquezNo ratings yet
- Creating Bode Plots From A Transfer FunctionDocument7 pagesCreating Bode Plots From A Transfer FunctionbasabNo ratings yet
- ### Note V5 - Frequency Response WTH Bode Plot NEW VERSION 2023Document22 pages### Note V5 - Frequency Response WTH Bode Plot NEW VERSION 2023Okewunmi PaulNo ratings yet
- Fundamentals of Digital Quadrature Modulation: Mixed SignalDocument5 pagesFundamentals of Digital Quadrature Modulation: Mixed SignalkurtpeekNo ratings yet
- ENTC 3320: Active FiltersDocument60 pagesENTC 3320: Active FiltersAbdullah NisarNo ratings yet
- Bode Plots Lecture Notes Study MaterialDocument9 pagesBode Plots Lecture Notes Study MaterialShivam GaunsNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Ra 9292 Sec.7 9Document14 pagesRa 9292 Sec.7 9Carmela Elaco VillanuevaNo ratings yet
- Ra 9292 - Group 1Document35 pagesRa 9292 - Group 1Carmela Elaco VillanuevaNo ratings yet
- Objective #1 Objective #2 Objective #3 Objective #4 Scope and LimitationDocument1 pageObjective #1 Objective #2 Objective #3 Objective #4 Scope and LimitationCarmela Elaco VillanuevaNo ratings yet
- Powerpoint Solar EnergyDocument18 pagesPowerpoint Solar EnergyCarmela Elaco VillanuevaNo ratings yet
- Wind EnergyDocument50 pagesWind EnergyCarmela Elaco VillanuevaNo ratings yet
- P (T T) One-Tail 0.270802066 Has Significant Difference: For XDocument4 pagesP (T T) One-Tail 0.270802066 Has Significant Difference: For XCarmela Elaco VillanuevaNo ratings yet
- GSM (Global System For Mobile Communications) Iden (Integrated Digital Enhanced Network) D-Amps (Digital Amps) Cdmaone PDCDocument5 pagesGSM (Global System For Mobile Communications) Iden (Integrated Digital Enhanced Network) D-Amps (Digital Amps) Cdmaone PDCCarmela Elaco VillanuevaNo ratings yet
- C Chapter 2Document31 pagesC Chapter 2Carmela Elaco VillanuevaNo ratings yet
- First AssignDocument2 pagesFirst AssignCarmela Elaco VillanuevaNo ratings yet
- LU Decomposition and Inverse MatrixDocument15 pagesLU Decomposition and Inverse MatrixCarmela Elaco VillanuevaNo ratings yet
- Euler ExamplesDocument35 pagesEuler ExamplesCarmela Elaco VillanuevaNo ratings yet
- Filipino ReferencesDocument2 pagesFilipino ReferencesCarmela Elaco VillanuevaNo ratings yet
- Back Up Lights With Time Delay SwitchDocument2 pagesBack Up Lights With Time Delay SwitchCarmela Elaco VillanuevaNo ratings yet
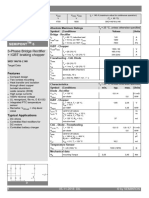
- SEMIKRON DataSheet SKD 146 16 L140 07912810Document4 pagesSEMIKRON DataSheet SKD 146 16 L140 07912810nikylin2517No ratings yet
- Arlec Wireless SecurityDocument10 pagesArlec Wireless Securityalfi56kNo ratings yet
- Cell Reselect ParameterDocument13 pagesCell Reselect ParameterEka KosasihNo ratings yet
- CNY64/ CNY65/ CNY66: VishayDocument11 pagesCNY64/ CNY65/ CNY66: VishayadmirgaragicNo ratings yet
- Voltage and Current Divider TheoremDocument8 pagesVoltage and Current Divider TheoremDavid Pogi MenesesNo ratings yet
- Z-002 Zigbee Module: H-2 Technik Ug (Haftungsbescgränkt)Document17 pagesZ-002 Zigbee Module: H-2 Technik Ug (Haftungsbescgränkt)Jeshu LopezNo ratings yet
- 8085 Microprocessor ArchitectureDocument16 pages8085 Microprocessor ArchitectureyayavaramNo ratings yet
- Cg0021en 11Document1 pageCg0021en 11sunny_nsecNo ratings yet
- DSC HX400/HX400VDocument120 pagesDSC HX400/HX400VStephen MooreNo ratings yet
- AMI KW 907-BT - Operations - ManualDocument9 pagesAMI KW 907-BT - Operations - ManualEric PskdNo ratings yet
- Impedance Tube 1Document2 pagesImpedance Tube 1Ajju JustusNo ratings yet
- Dual Power MOSFET Driver Features: File Number Data Sheet April 1999Document8 pagesDual Power MOSFET Driver Features: File Number Data Sheet April 1999tommyhghNo ratings yet
- Epl SyllabusDocument2 pagesEpl SyllabuskaviinfoenggNo ratings yet
- Wireless World 1969 04Document188 pagesWireless World 1969 04jacomartNo ratings yet
- Users-Manual-Top Ten GT08Document18 pagesUsers-Manual-Top Ten GT08Wellington Cerqueira MagnoNo ratings yet
- DatasheetDocument2 pagesDatasheetRobertoNo ratings yet
- Panasonic KX-TVP50 BrochureDocument6 pagesPanasonic KX-TVP50 BrochureAris HaryantoNo ratings yet
- RCF Professional Speaker Systems Catalogue PDFDocument68 pagesRCF Professional Speaker Systems Catalogue PDFNestor CastilloNo ratings yet
- CSS 9 - Q2 W3 Mod2 - Install Network Cables Network Copper Cable Splicing and Cable Testing - v1Document28 pagesCSS 9 - Q2 W3 Mod2 - Install Network Cables Network Copper Cable Splicing and Cable Testing - v1JOSHUA REYESNo ratings yet
- Fire Alarm Technical Information SIE-820-6029-01 PDFDocument113 pagesFire Alarm Technical Information SIE-820-6029-01 PDFMudabbir HussainNo ratings yet
- Circuit Description 3624Document5 pagesCircuit Description 3624ashokvaasanNo ratings yet
- Gopi Krishna Saramekala Assistant Professor: National Institute of Technology CalicutDocument56 pagesGopi Krishna Saramekala Assistant Professor: National Institute of Technology Calicutarjun raghavan.vNo ratings yet
- 16 BitDocument15 pages16 BitVinay ReddyNo ratings yet
- File 0 83 1573 0 0Document6 pagesFile 0 83 1573 0 0muhammad amirNo ratings yet
- Donnelly PDFDocument2 pagesDonnelly PDFTung Bui ThanhNo ratings yet
- FB Easymode Iut-F190-B40 Tia Eng v13Document78 pagesFB Easymode Iut-F190-B40 Tia Eng v13ibrhmkrdmrNo ratings yet
- 7VH60xx Manual A3 enDocument75 pages7VH60xx Manual A3 enVishwanath Todurkar100% (1)
- 1tqc1232e0040 - CGP3-100 Rev.e April 2022Document4 pages1tqc1232e0040 - CGP3-100 Rev.e April 2022Adonay HqzNo ratings yet