Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5824)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- VoLTE Performance Analysis and Optimization - C & QDocument17 pagesVoLTE Performance Analysis and Optimization - C & QKwame Otchere-TawiahNo ratings yet
- ادارة مشروعات للدكتور ابراهيم عبدالرشيد PDFDocument144 pagesادارة مشروعات للدكتور ابراهيم عبدالرشيد PDFreghouacheNo ratings yet
- 99-Planning Sucessful Museum Buildingm Projects PDFDocument303 pages99-Planning Sucessful Museum Buildingm Projects PDFreghouacheNo ratings yet
- Typical ScheduleDocument14 pagesTypical Schedulereghouache100% (1)
- Sky Scraper SampleDocument1 pageSky Scraper SamplereghouacheNo ratings yet
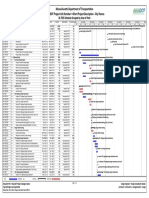
- Typical Bridge Sched MunicipalDocument4 pagesTypical Bridge Sched MunicipalreghouacheNo ratings yet
- 74270Document177 pages74270junaid112No ratings yet
- Contract Manager User GuideDocument454 pagesContract Manager User Guidesayinsoy8644No ratings yet
- Lab 2Document6 pagesLab 2reghouacheNo ratings yet
- Paint Application Standard No. 2: SSPC: The Society For Protective CoatingsDocument7 pagesPaint Application Standard No. 2: SSPC: The Society For Protective CoatingsreghouacheNo ratings yet
- Paint Application Standard No. 2: SSPC: The Society For Protective CoatingsDocument6 pagesPaint Application Standard No. 2: SSPC: The Society For Protective CoatingsreghouacheNo ratings yet
- 15hc11 Optimization Techniques in EngineeringDocument1 page15hc11 Optimization Techniques in Engineeringarun2386No ratings yet
- 6-2-4 CST EucDocument30 pages6-2-4 CST EucDo SonNo ratings yet
- Ansys Tutorial For Design OptimizationDocument20 pagesAnsys Tutorial For Design Optimizationvasu7900No ratings yet
- Apj Abdul Kalam Technological University: Advanced Manufacturing and Mechanical Systems DesignDocument57 pagesApj Abdul Kalam Technological University: Advanced Manufacturing and Mechanical Systems DesignPramod mishraNo ratings yet
- Optimum Design of Wide Span Cable-Stayed Roof StructuresDocument13 pagesOptimum Design of Wide Span Cable-Stayed Roof StructuresAndrés Juárez SánchezNo ratings yet
- Nlewis65!52!56 Classroom Joye 22 No 1 Winter 1988 CeeDocument5 pagesNlewis65!52!56 Classroom Joye 22 No 1 Winter 1988 Ceekaterin Yanac TelloNo ratings yet
- Optimization: Logistics Network ConfigurationDocument13 pagesOptimization: Logistics Network Configurationdian fajrianaNo ratings yet
- NPVS Course Level 2Document31 pagesNPVS Course Level 2Juan David Rondinel BulejeNo ratings yet
- Intelligent Computer-Aided Process Planning of Multi-Axis CNC Tapping MachineDocument8 pagesIntelligent Computer-Aided Process Planning of Multi-Axis CNC Tapping MachineTieNo ratings yet
- Social NetworksDocument5 pagesSocial NetworksDhesa Umali-Ariel Anyayahan100% (1)
- Artigo IEEE - PESCHON 1968 - Sensitivity in Power SystemsDocument10 pagesArtigo IEEE - PESCHON 1968 - Sensitivity in Power SystemsAndrey LopesNo ratings yet
- Demand Driven LEAN SCMDocument22 pagesDemand Driven LEAN SCMyassin900100% (1)
- DO Section 5-6Document46 pagesDO Section 5-6Gianita SimatupangNo ratings yet
- Introduction To Managerial EcoDocument6 pagesIntroduction To Managerial EcoAayush BhattaraiNo ratings yet
- InternshipDocument54 pagesInternshipRaj DanishNo ratings yet
- Application of Particle Swarm Optimization in The Design of Halbach Permanent Magnet Synchronous Generators For Megawatt Level Wind TurbinesDocument4 pagesApplication of Particle Swarm Optimization in The Design of Halbach Permanent Magnet Synchronous Generators For Megawatt Level Wind TurbinesJuan MataNo ratings yet
- Optimization Assignment ReferenceDocument36 pagesOptimization Assignment ReferenceSHEENA SONKUSARENo ratings yet
- Objective: Company: Lightning Networks Position: 3G Radio Planning and Optimization Engineer. 2016Document5 pagesObjective: Company: Lightning Networks Position: 3G Radio Planning and Optimization Engineer. 2016kachizihNo ratings yet
- Production-System Optimization of Gas Fields Using Hybrid Fuzzy/Genetic ApproachDocument9 pagesProduction-System Optimization of Gas Fields Using Hybrid Fuzzy/Genetic ApproachLimberg Tola MaytaNo ratings yet
- A Review of Hybrid-Electric Energy Management and Its Inclusion in Vehicle SizingDocument8 pagesA Review of Hybrid-Electric Energy Management and Its Inclusion in Vehicle Sizingzc weiNo ratings yet
- Aerospace Dissertation IdeasDocument5 pagesAerospace Dissertation IdeasPsychologyPaperWritingServiceHartford100% (1)
- Ethanol Amine ProductionDocument8 pagesEthanol Amine ProductionFatih FıratNo ratings yet
- 200 Questions, Graphical, Transportation and Waiting LinesDocument64 pages200 Questions, Graphical, Transportation and Waiting LinesMOH. SIDIK100% (1)
- Optimization of Gear Parameters by Using Genetic AlgorithmDocument8 pagesOptimization of Gear Parameters by Using Genetic AlgorithmkismuganNo ratings yet
- Maths For EconomicsDocument17 pagesMaths For EconomicskentbnxNo ratings yet
- Operations Management Thesis TitleDocument8 pagesOperations Management Thesis Titleannemarieolathe100% (1)
- Operations Research ILO 7015: Pro Jay GoyDocument18 pagesOperations Research ILO 7015: Pro Jay GoyMeet ShahNo ratings yet
- WBDocument500 pagesWBপ্রিয়দীপ প্রিয়মNo ratings yet
- 100 ChatGPT Programming PromptsDocument15 pages100 ChatGPT Programming Promptsdb118100% (1)