
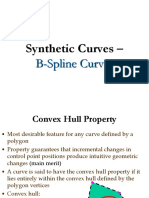
B-Splines and NURBS: Outline
B-Splines and NURBS: Outline
You might also like
- Full Download Ebook Ebook PDF Numerical Mathematics and Computing 7th Edition by e Ward Cheney PDFDocument41 pagesFull Download Ebook Ebook PDF Numerical Mathematics and Computing 7th Edition by e Ward Cheney PDFmyra.gordon71298% (47)
- Failure Analysis of A Car Suspension System Ball JointDocument8 pagesFailure Analysis of A Car Suspension System Ball Jointsubha_aeroNo ratings yet
- Computer Graphics 17 - Curves and Surfaces 2: Tom ThorneDocument58 pagesComputer Graphics 17 - Curves and Surfaces 2: Tom Thornevishwajeet patilNo ratings yet
- Lecture 10 B-SplinesDocument29 pagesLecture 10 B-SplinesPrashant ChaudhryNo ratings yet
- B SplinesDocument55 pagesB SplinesHoney4444No ratings yet
- NURBS SurfacesDocument53 pagesNURBS Surfacessubha_aeroNo ratings yet
- B-Spline Curves: N K T T T T TDocument5 pagesB-Spline Curves: N K T T T T TRishab GuptaNo ratings yet
- B Spline1Document29 pagesB Spline1Atul ChauhanNo ratings yet
- 4.bezier CurveDocument46 pages4.bezier CurveYashovardhan BangurNo ratings yet
- C05.B - Approximation Curves - Bs-PlinesDocument56 pagesC05.B - Approximation Curves - Bs-PlinesKhánh LêNo ratings yet
- Lecture 22 OnlineDocument22 pagesLecture 22 OnlineRashmi MaheshwariNo ratings yet
- Bezier Curves and Splines (CAD)Document22 pagesBezier Curves and Splines (CAD)SAGAR GOSWAMINo ratings yet
- Three Dimensional RepresentationDocument33 pagesThree Dimensional RepresentationWafa ElgalhoudNo ratings yet
- ClippingDocument43 pagesClippingAseem SharmaNo ratings yet
- CS 4495 Computer Vision: N-Views (1) - Homographies and ProjectionDocument56 pagesCS 4495 Computer Vision: N-Views (1) - Homographies and ProjectionNada MohamedNo ratings yet
- File 5e95c84ed158cDocument4 pagesFile 5e95c84ed158cNitesh MalviyaNo ratings yet
- Day 24Document10 pagesDay 24Groleo MuttNo ratings yet
- Image Segmentation Graph CutDocument35 pagesImage Segmentation Graph CutSubrat KabiNo ratings yet
- Chapter 5 - Root Locus - HO PDFDocument6 pagesChapter 5 - Root Locus - HO PDFReinaldy MaslimNo ratings yet
- Lecture4 and 5Document47 pagesLecture4 and 5Hola GolaNo ratings yet
- Pumping Lemma (Bar Hillel Lemma)Document49 pagesPumping Lemma (Bar Hillel Lemma)yash_vardhan_4No ratings yet
- Lecture 17 Parametric Curves and SurfacesDocument18 pagesLecture 17 Parametric Curves and SurfacesAijaz SaudagarNo ratings yet
- M2-4-Geom Mod Syn Curv Bezier 230420210945Document67 pagesM2-4-Geom Mod Syn Curv Bezier 230420210945NANDULA GOUTHAM SAINo ratings yet
- Lecture 8 Synthetic CurvesDocument21 pagesLecture 8 Synthetic CurvesPrashant ChaudhryNo ratings yet
- Theory of Machines Fall 2023..Document15 pagesTheory of Machines Fall 2023..6r7fhxygbmNo ratings yet
- Slender ColumnsDocument34 pagesSlender ColumnsAshraf ZayedNo ratings yet
- Fem Ea 02Document10 pagesFem Ea 02Steven N. ButrusNo ratings yet
- 10 SubdivisionDocument89 pages10 SubdivisionNina DmitrievaNo ratings yet
- n32 ParallelDocument16 pagesn32 ParallelsamNo ratings yet
- CH 4: Manipulator Kinematics: Task Space (X, Y, Z,) Joint SpaceDocument61 pagesCH 4: Manipulator Kinematics: Task Space (X, Y, Z,) Joint SpaceLuật NguyễnNo ratings yet
- Why Parametric Curves?: - Polygon Meshes Have As Many Parameters As There Are Vertices (At Least)Document12 pagesWhy Parametric Curves?: - Polygon Meshes Have As Many Parameters As There Are Vertices (At Least)Aadip KushwahaNo ratings yet
- Lecture 2 - LP Basics1Document33 pagesLecture 2 - LP Basics1TarekYehiaNo ratings yet
- Linear Block Codes PDFDocument27 pagesLinear Block Codes PDFdup acountNo ratings yet
- 2D ViewingDocument34 pages2D Viewingkjindal1221No ratings yet
- Singular Value DecompositionDocument24 pagesSingular Value DecompositionDevansh DwivediNo ratings yet
- Elec2200 4 PDFDocument16 pagesElec2200 4 PDFRomel Taga-amoNo ratings yet
- Chapter 09Document34 pagesChapter 09khalil alhatabNo ratings yet
- Notes 1136 UNIT II Lesson 7 Shuchita Graphics Ellipses & CurvesDocument11 pagesNotes 1136 UNIT II Lesson 7 Shuchita Graphics Ellipses & Curveskomalkaushik1212No ratings yet
- 37 B splines+NURBSDocument12 pages37 B splines+NURBSGowthaman SrinivasanNo ratings yet
- Combinational Logic DesignDocument32 pagesCombinational Logic DesignMustafa Alper KÖSENo ratings yet
- Chapter 2: Digital Design and Computer Architecture, 2Document21 pagesChapter 2: Digital Design and Computer Architecture, 2gopika hariNo ratings yet
- 159.235 Graphics & Graphical Programming: Lecture 28 - Curves & Surfaces IIDocument27 pages159.235 Graphics & Graphical Programming: Lecture 28 - Curves & Surfaces IIThomas KimNo ratings yet
- Basis Expansion and Regularization: Prof. Liqing ZhangDocument45 pagesBasis Expansion and Regularization: Prof. Liqing ZhangPeter ParkerNo ratings yet
- Limitations of Polygonal Meshes - Planar Facets - Fixed Resolution - Deformation Is DifficultDocument21 pagesLimitations of Polygonal Meshes - Planar Facets - Fixed Resolution - Deformation Is DifficultPriyanka GuptaNo ratings yet
- Lect#3Document53 pagesLect#3Youssef EbrahimNo ratings yet
- Introduction of Particle Image VelocimetryDocument57 pagesIntroduction of Particle Image VelocimetrySiamakNo ratings yet
- 7 CurvesBSpline Rev 2Document53 pages7 CurvesBSpline Rev 2Anonymous dGnj3bZNo ratings yet
- Signal Expressions: - Multiply Out: F ( (X + Y) Z) + (X Y Z) (X Z) + (Y Z) + (X Y ZDocument26 pagesSignal Expressions: - Multiply Out: F ( (X + Y) Z) + (X Y Z) (X Z) + (Y Z) + (X Y ZCho ConNo ratings yet
- Representing Curves and SurfacesDocument21 pagesRepresenting Curves and SurfacesjthanikNo ratings yet
- Kuliah 5c Partial-Responsed Signal ISIDocument29 pagesKuliah 5c Partial-Responsed Signal ISIPahala SamosirNo ratings yet
- Analog LayoutDocument116 pagesAnalog LayoutvinayNo ratings yet
- Parametric CurvesDocument14 pagesParametric CurvesKhiết Cổ Lão NhânNo ratings yet
- Curve-Fitting and InterpolationDocument16 pagesCurve-Fitting and InterpolationZafar IqbalNo ratings yet
- Chapter 3 - Combinational Logic DesignDocument32 pagesChapter 3 - Combinational Logic DesignboymatterNo ratings yet
- Circle Basic Summary ?Document17 pagesCircle Basic Summary ?pNo ratings yet
- CDM KinematicsDocument13 pagesCDM Kinematicsfranck mwambaNo ratings yet
- Today's Lecture: Repetition and Refinement of Image BasicsDocument36 pagesToday's Lecture: Repetition and Refinement of Image BasicsAli KassabNo ratings yet
- Line Drawing: OutlineDocument9 pagesLine Drawing: OutlineAyushi ChaplotNo ratings yet
- L-02 Lines.6 PDFDocument9 pagesL-02 Lines.6 PDFnootiNo ratings yet
- Physical Design AutomationDocument116 pagesPhysical Design AutomationMaheshNo ratings yet
- Discrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)From EverandDiscrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)No ratings yet
- Controller of Examinations: M.E. Electronics and Communication Engineering (Industry Integrated) BranchDocument48 pagesController of Examinations: M.E. Electronics and Communication Engineering (Industry Integrated) Branchsubha_aeroNo ratings yet
- Sports Quota Selection 2021 2022Document1 pageSports Quota Selection 2021 2022subha_aeroNo ratings yet
- Boeing Blended WingletDocument45 pagesBoeing Blended Wingletsubha_aeroNo ratings yet
- Applications of Finite Element Stress Analysis of Heavy Truck Chassis: Survey and Recent DevelopmentDocument6 pagesApplications of Finite Element Stress Analysis of Heavy Truck Chassis: Survey and Recent Developmentsubha_aeroNo ratings yet
- Arithmetic Processor For Solving Tridiagonal Systems of Linear EquationsDocument5 pagesArithmetic Processor For Solving Tridiagonal Systems of Linear Equationssubha_aeroNo ratings yet
- A Design Approach & Selected Wind-Tunnel Results at High Subsonic Speeds For Wing-Tip Mounted WingletsDocument5 pagesA Design Approach & Selected Wind-Tunnel Results at High Subsonic Speeds For Wing-Tip Mounted Wingletssubha_aeroNo ratings yet
- A Design Approach & Selected Wind-Tunnel Results at High Subsonic Speeds For Wing-Tip Mounted Winglets PDFDocument33 pagesA Design Approach & Selected Wind-Tunnel Results at High Subsonic Speeds For Wing-Tip Mounted Winglets PDFsubha_aeroNo ratings yet
- Tailor Weld BlanksDocument6 pagesTailor Weld Blankssubha_aeroNo ratings yet
- A380 ReferenceDocument12 pagesA380 Referencesubha_aeroNo ratings yet
- Module 3 Lesson 4Document6 pagesModule 3 Lesson 4subha_aeroNo ratings yet
- Towing Definitions and Terms: Class IDocument3 pagesTowing Definitions and Terms: Class Isubha_aeroNo ratings yet
- Unit 1 IntroductionDocument38 pagesUnit 1 Introductionsubha_aeroNo ratings yet
- Numerical Analysis of Bridge Aerodynamics: Guido Morgenthal Maunsell Consultants Asia LTD., Hong Kong, ChinaDocument12 pagesNumerical Analysis of Bridge Aerodynamics: Guido Morgenthal Maunsell Consultants Asia LTD., Hong Kong, Chinasubha_aeroNo ratings yet
- Analysis Information of Powertrain ComponentsDocument21 pagesAnalysis Information of Powertrain Componentssubha_aeroNo ratings yet
- NURBS SurfacesDocument53 pagesNURBS Surfacessubha_aeroNo ratings yet
- Crankshaft Full Report 2Document208 pagesCrankshaft Full Report 2Anirudhreddy SafalNo ratings yet
- Cagd: Design of Curves: Splines & NURBSDocument61 pagesCagd: Design of Curves: Splines & NURBSsubha_aeroNo ratings yet
- Lec6 PDFDocument82 pagesLec6 PDFArun ShalNo ratings yet
- 840D Pga PDFDocument666 pages840D Pga PDFsadeghi1627mNo ratings yet
- Fullpaper-Dr Jason NG Wei JianDocument16 pagesFullpaper-Dr Jason NG Wei JianfarishasbiNo ratings yet
- NX CAD Training ReportDocument22 pagesNX CAD Training ReportSatyam SharmaNo ratings yet
- Chapter-5 Curve FittingDocument48 pagesChapter-5 Curve FittingZeynadin ABNo ratings yet
- FIMMDA Valuation MethodologyDocument13 pagesFIMMDA Valuation MethodologyRajashekhar PujariNo ratings yet
- CG Question BankDocument17 pagesCG Question BankAnonymous DFpzhrRNo ratings yet
- Ajeesh S S, Arul Jayachandran S, A Constrained Spline Finite Strip MethodDocument11 pagesAjeesh S S, Arul Jayachandran S, A Constrained Spline Finite Strip MethodamokeNo ratings yet
- Sketching Piecewise Clothoid CurvesDocument8 pagesSketching Piecewise Clothoid Curvesidrissi_toronNo ratings yet
- Drawing Contours From Arbitrary Data Points: D. H. MclainDocument7 pagesDrawing Contours From Arbitrary Data Points: D. H. MclainFernando Cabezas MolinaNo ratings yet
- Textbook Advances in Soft and Hard Computing Jerzy Pejas Ebook All Chapter PDFDocument53 pagesTextbook Advances in Soft and Hard Computing Jerzy Pejas Ebook All Chapter PDFmaria.becknell450100% (24)
- Curve Fitting: (X, Y) Through (X, Y) Is To Predict The Value of y When The Value of X Is Specified. ThereDocument9 pagesCurve Fitting: (X, Y) Through (X, Y) Is To Predict The Value of y When The Value of X Is Specified. Theremelvin matiasNo ratings yet
- Cubic Spline Questions: SolutionDocument11 pagesCubic Spline Questions: SolutionJUNIOR CCAIHUARI HOYOSNo ratings yet
- Retinal Blood Vessel Segmentation and Measurement of Vessel DiametersDocument6 pagesRetinal Blood Vessel Segmentation and Measurement of Vessel DiametersLekshmiNo ratings yet
- IMSL IDL With The IMSL Math Library and Exponet Gra PDFDocument64 pagesIMSL IDL With The IMSL Math Library and Exponet Gra PDFAshoka VanjareNo ratings yet
- Lec02-4 Splines InterpolationDocument14 pagesLec02-4 Splines InterpolationMauro Sebastián InnocenteNo ratings yet
- Spline and Penalized RegressionDocument45 pagesSpline and Penalized RegressionLuh Putu Safitri PratiwiNo ratings yet
- Scientific and Engineering Applications Using MatlabDocument214 pagesScientific and Engineering Applications Using MatlabDavid DonosoNo ratings yet
- Chap11 (Proc Expand)Document41 pagesChap11 (Proc Expand)smhabbasNo ratings yet
- CDI 63: Advanced Surfacing in Solidworks: Documentation Package ForDocument17 pagesCDI 63: Advanced Surfacing in Solidworks: Documentation Package ForGaurav GuptaNo ratings yet
- Cubic Spline Interpolation: J. R. ShresthaDocument11 pagesCubic Spline Interpolation: J. R. ShresthaSashank GaudelNo ratings yet
- Bezier & B-Spline CurveDocument3 pagesBezier & B-Spline Curveakshay_pundeNo ratings yet
- RCsplinesDocument18 pagesRCsplinesrafael.sebastianNo ratings yet
- 05 - EN Sbirka Matematika 3 57 113 PDFDocument57 pages05 - EN Sbirka Matematika 3 57 113 PDFXDSerAngel BejarMNo ratings yet
- InterpolationDocument24 pagesInterpolationsubha_aeroNo ratings yet
- Approximation Theory PDFDocument24 pagesApproximation Theory PDFvigchaitanya4224No ratings yet
- Blobby ObjectsDocument15 pagesBlobby Objectslarenjose2007No ratings yet
- Atmospheric Ascent Guidance For Rocket-Powered Launch VehiclesDocument11 pagesAtmospheric Ascent Guidance For Rocket-Powered Launch VehiclesBonzi BuddyNo ratings yet
- Cubic SplineDocument19 pagesCubic SplineCindy Chris KePochiNo ratings yet









































































































Download as pdf or txt
You might also like
- Full Download Ebook Ebook PDF Numerical Mathematics and Computing 7th Edition by e Ward Cheney PDFDocument41 pagesFull Download Ebook Ebook PDF Numerical Mathematics and Computing 7th Edition by e Ward Cheney PDFmyra.gordon71298% (47)
- Failure Analysis of A Car Suspension System Ball JointDocument8 pagesFailure Analysis of A Car Suspension System Ball Jointsubha_aeroNo ratings yet
- Computer Graphics 17 - Curves and Surfaces 2: Tom ThorneDocument58 pagesComputer Graphics 17 - Curves and Surfaces 2: Tom Thornevishwajeet patilNo ratings yet
- Lecture 10 B-SplinesDocument29 pagesLecture 10 B-SplinesPrashant ChaudhryNo ratings yet
- B SplinesDocument55 pagesB SplinesHoney4444No ratings yet
- NURBS SurfacesDocument53 pagesNURBS Surfacessubha_aeroNo ratings yet
- B-Spline Curves: N K T T T T TDocument5 pagesB-Spline Curves: N K T T T T TRishab GuptaNo ratings yet
- B Spline1Document29 pagesB Spline1Atul ChauhanNo ratings yet
- 4.bezier CurveDocument46 pages4.bezier CurveYashovardhan BangurNo ratings yet
- C05.B - Approximation Curves - Bs-PlinesDocument56 pagesC05.B - Approximation Curves - Bs-PlinesKhánh LêNo ratings yet
- Lecture 22 OnlineDocument22 pagesLecture 22 OnlineRashmi MaheshwariNo ratings yet
- Bezier Curves and Splines (CAD)Document22 pagesBezier Curves and Splines (CAD)SAGAR GOSWAMINo ratings yet
- Three Dimensional RepresentationDocument33 pagesThree Dimensional RepresentationWafa ElgalhoudNo ratings yet
- ClippingDocument43 pagesClippingAseem SharmaNo ratings yet
- CS 4495 Computer Vision: N-Views (1) - Homographies and ProjectionDocument56 pagesCS 4495 Computer Vision: N-Views (1) - Homographies and ProjectionNada MohamedNo ratings yet
- File 5e95c84ed158cDocument4 pagesFile 5e95c84ed158cNitesh MalviyaNo ratings yet
- Day 24Document10 pagesDay 24Groleo MuttNo ratings yet
- Image Segmentation Graph CutDocument35 pagesImage Segmentation Graph CutSubrat KabiNo ratings yet
- Chapter 5 - Root Locus - HO PDFDocument6 pagesChapter 5 - Root Locus - HO PDFReinaldy MaslimNo ratings yet
- Lecture4 and 5Document47 pagesLecture4 and 5Hola GolaNo ratings yet
- Pumping Lemma (Bar Hillel Lemma)Document49 pagesPumping Lemma (Bar Hillel Lemma)yash_vardhan_4No ratings yet
- Lecture 17 Parametric Curves and SurfacesDocument18 pagesLecture 17 Parametric Curves and SurfacesAijaz SaudagarNo ratings yet
- M2-4-Geom Mod Syn Curv Bezier 230420210945Document67 pagesM2-4-Geom Mod Syn Curv Bezier 230420210945NANDULA GOUTHAM SAINo ratings yet
- Lecture 8 Synthetic CurvesDocument21 pagesLecture 8 Synthetic CurvesPrashant ChaudhryNo ratings yet
- Theory of Machines Fall 2023..Document15 pagesTheory of Machines Fall 2023..6r7fhxygbmNo ratings yet
- Slender ColumnsDocument34 pagesSlender ColumnsAshraf ZayedNo ratings yet
- Fem Ea 02Document10 pagesFem Ea 02Steven N. ButrusNo ratings yet
- 10 SubdivisionDocument89 pages10 SubdivisionNina DmitrievaNo ratings yet
- n32 ParallelDocument16 pagesn32 ParallelsamNo ratings yet
- CH 4: Manipulator Kinematics: Task Space (X, Y, Z,) Joint SpaceDocument61 pagesCH 4: Manipulator Kinematics: Task Space (X, Y, Z,) Joint SpaceLuật NguyễnNo ratings yet
- Why Parametric Curves?: - Polygon Meshes Have As Many Parameters As There Are Vertices (At Least)Document12 pagesWhy Parametric Curves?: - Polygon Meshes Have As Many Parameters As There Are Vertices (At Least)Aadip KushwahaNo ratings yet
- Lecture 2 - LP Basics1Document33 pagesLecture 2 - LP Basics1TarekYehiaNo ratings yet
- Linear Block Codes PDFDocument27 pagesLinear Block Codes PDFdup acountNo ratings yet
- 2D ViewingDocument34 pages2D Viewingkjindal1221No ratings yet
- Singular Value DecompositionDocument24 pagesSingular Value DecompositionDevansh DwivediNo ratings yet
- Elec2200 4 PDFDocument16 pagesElec2200 4 PDFRomel Taga-amoNo ratings yet
- Chapter 09Document34 pagesChapter 09khalil alhatabNo ratings yet
- Notes 1136 UNIT II Lesson 7 Shuchita Graphics Ellipses & CurvesDocument11 pagesNotes 1136 UNIT II Lesson 7 Shuchita Graphics Ellipses & Curveskomalkaushik1212No ratings yet
- 37 B splines+NURBSDocument12 pages37 B splines+NURBSGowthaman SrinivasanNo ratings yet
- Combinational Logic DesignDocument32 pagesCombinational Logic DesignMustafa Alper KÖSENo ratings yet
- Chapter 2: Digital Design and Computer Architecture, 2Document21 pagesChapter 2: Digital Design and Computer Architecture, 2gopika hariNo ratings yet
- 159.235 Graphics & Graphical Programming: Lecture 28 - Curves & Surfaces IIDocument27 pages159.235 Graphics & Graphical Programming: Lecture 28 - Curves & Surfaces IIThomas KimNo ratings yet
- Basis Expansion and Regularization: Prof. Liqing ZhangDocument45 pagesBasis Expansion and Regularization: Prof. Liqing ZhangPeter ParkerNo ratings yet
- Limitations of Polygonal Meshes - Planar Facets - Fixed Resolution - Deformation Is DifficultDocument21 pagesLimitations of Polygonal Meshes - Planar Facets - Fixed Resolution - Deformation Is DifficultPriyanka GuptaNo ratings yet
- Lect#3Document53 pagesLect#3Youssef EbrahimNo ratings yet
- Introduction of Particle Image VelocimetryDocument57 pagesIntroduction of Particle Image VelocimetrySiamakNo ratings yet
- 7 CurvesBSpline Rev 2Document53 pages7 CurvesBSpline Rev 2Anonymous dGnj3bZNo ratings yet
- Signal Expressions: - Multiply Out: F ( (X + Y) Z) + (X Y Z) (X Z) + (Y Z) + (X Y ZDocument26 pagesSignal Expressions: - Multiply Out: F ( (X + Y) Z) + (X Y Z) (X Z) + (Y Z) + (X Y ZCho ConNo ratings yet
- Representing Curves and SurfacesDocument21 pagesRepresenting Curves and SurfacesjthanikNo ratings yet
- Kuliah 5c Partial-Responsed Signal ISIDocument29 pagesKuliah 5c Partial-Responsed Signal ISIPahala SamosirNo ratings yet
- Analog LayoutDocument116 pagesAnalog LayoutvinayNo ratings yet
- Parametric CurvesDocument14 pagesParametric CurvesKhiết Cổ Lão NhânNo ratings yet
- Curve-Fitting and InterpolationDocument16 pagesCurve-Fitting and InterpolationZafar IqbalNo ratings yet
- Chapter 3 - Combinational Logic DesignDocument32 pagesChapter 3 - Combinational Logic DesignboymatterNo ratings yet
- Circle Basic Summary ?Document17 pagesCircle Basic Summary ?pNo ratings yet
- CDM KinematicsDocument13 pagesCDM Kinematicsfranck mwambaNo ratings yet
- Today's Lecture: Repetition and Refinement of Image BasicsDocument36 pagesToday's Lecture: Repetition and Refinement of Image BasicsAli KassabNo ratings yet
- Line Drawing: OutlineDocument9 pagesLine Drawing: OutlineAyushi ChaplotNo ratings yet
- L-02 Lines.6 PDFDocument9 pagesL-02 Lines.6 PDFnootiNo ratings yet
- Physical Design AutomationDocument116 pagesPhysical Design AutomationMaheshNo ratings yet
- Discrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)From EverandDiscrete Orthogonal Polynomials. (AM-164): Asymptotics and Applications (AM-164)No ratings yet
- Controller of Examinations: M.E. Electronics and Communication Engineering (Industry Integrated) BranchDocument48 pagesController of Examinations: M.E. Electronics and Communication Engineering (Industry Integrated) Branchsubha_aeroNo ratings yet
- Sports Quota Selection 2021 2022Document1 pageSports Quota Selection 2021 2022subha_aeroNo ratings yet
- Boeing Blended WingletDocument45 pagesBoeing Blended Wingletsubha_aeroNo ratings yet
- Applications of Finite Element Stress Analysis of Heavy Truck Chassis: Survey and Recent DevelopmentDocument6 pagesApplications of Finite Element Stress Analysis of Heavy Truck Chassis: Survey and Recent Developmentsubha_aeroNo ratings yet
- Arithmetic Processor For Solving Tridiagonal Systems of Linear EquationsDocument5 pagesArithmetic Processor For Solving Tridiagonal Systems of Linear Equationssubha_aeroNo ratings yet
- A Design Approach & Selected Wind-Tunnel Results at High Subsonic Speeds For Wing-Tip Mounted WingletsDocument5 pagesA Design Approach & Selected Wind-Tunnel Results at High Subsonic Speeds For Wing-Tip Mounted Wingletssubha_aeroNo ratings yet
- A Design Approach & Selected Wind-Tunnel Results at High Subsonic Speeds For Wing-Tip Mounted Winglets PDFDocument33 pagesA Design Approach & Selected Wind-Tunnel Results at High Subsonic Speeds For Wing-Tip Mounted Winglets PDFsubha_aeroNo ratings yet
- Tailor Weld BlanksDocument6 pagesTailor Weld Blankssubha_aeroNo ratings yet
- A380 ReferenceDocument12 pagesA380 Referencesubha_aeroNo ratings yet
- Module 3 Lesson 4Document6 pagesModule 3 Lesson 4subha_aeroNo ratings yet
- Towing Definitions and Terms: Class IDocument3 pagesTowing Definitions and Terms: Class Isubha_aeroNo ratings yet
- Unit 1 IntroductionDocument38 pagesUnit 1 Introductionsubha_aeroNo ratings yet
- Numerical Analysis of Bridge Aerodynamics: Guido Morgenthal Maunsell Consultants Asia LTD., Hong Kong, ChinaDocument12 pagesNumerical Analysis of Bridge Aerodynamics: Guido Morgenthal Maunsell Consultants Asia LTD., Hong Kong, Chinasubha_aeroNo ratings yet
- Analysis Information of Powertrain ComponentsDocument21 pagesAnalysis Information of Powertrain Componentssubha_aeroNo ratings yet
- NURBS SurfacesDocument53 pagesNURBS Surfacessubha_aeroNo ratings yet
- Crankshaft Full Report 2Document208 pagesCrankshaft Full Report 2Anirudhreddy SafalNo ratings yet
- Cagd: Design of Curves: Splines & NURBSDocument61 pagesCagd: Design of Curves: Splines & NURBSsubha_aeroNo ratings yet
- Lec6 PDFDocument82 pagesLec6 PDFArun ShalNo ratings yet
- 840D Pga PDFDocument666 pages840D Pga PDFsadeghi1627mNo ratings yet
- Fullpaper-Dr Jason NG Wei JianDocument16 pagesFullpaper-Dr Jason NG Wei JianfarishasbiNo ratings yet
- NX CAD Training ReportDocument22 pagesNX CAD Training ReportSatyam SharmaNo ratings yet
- Chapter-5 Curve FittingDocument48 pagesChapter-5 Curve FittingZeynadin ABNo ratings yet
- FIMMDA Valuation MethodologyDocument13 pagesFIMMDA Valuation MethodologyRajashekhar PujariNo ratings yet
- CG Question BankDocument17 pagesCG Question BankAnonymous DFpzhrRNo ratings yet
- Ajeesh S S, Arul Jayachandran S, A Constrained Spline Finite Strip MethodDocument11 pagesAjeesh S S, Arul Jayachandran S, A Constrained Spline Finite Strip MethodamokeNo ratings yet
- Sketching Piecewise Clothoid CurvesDocument8 pagesSketching Piecewise Clothoid Curvesidrissi_toronNo ratings yet
- Drawing Contours From Arbitrary Data Points: D. H. MclainDocument7 pagesDrawing Contours From Arbitrary Data Points: D. H. MclainFernando Cabezas MolinaNo ratings yet
- Textbook Advances in Soft and Hard Computing Jerzy Pejas Ebook All Chapter PDFDocument53 pagesTextbook Advances in Soft and Hard Computing Jerzy Pejas Ebook All Chapter PDFmaria.becknell450100% (24)
- Curve Fitting: (X, Y) Through (X, Y) Is To Predict The Value of y When The Value of X Is Specified. ThereDocument9 pagesCurve Fitting: (X, Y) Through (X, Y) Is To Predict The Value of y When The Value of X Is Specified. Theremelvin matiasNo ratings yet
- Cubic Spline Questions: SolutionDocument11 pagesCubic Spline Questions: SolutionJUNIOR CCAIHUARI HOYOSNo ratings yet
- Retinal Blood Vessel Segmentation and Measurement of Vessel DiametersDocument6 pagesRetinal Blood Vessel Segmentation and Measurement of Vessel DiametersLekshmiNo ratings yet
- IMSL IDL With The IMSL Math Library and Exponet Gra PDFDocument64 pagesIMSL IDL With The IMSL Math Library and Exponet Gra PDFAshoka VanjareNo ratings yet
- Lec02-4 Splines InterpolationDocument14 pagesLec02-4 Splines InterpolationMauro Sebastián InnocenteNo ratings yet
- Spline and Penalized RegressionDocument45 pagesSpline and Penalized RegressionLuh Putu Safitri PratiwiNo ratings yet
- Scientific and Engineering Applications Using MatlabDocument214 pagesScientific and Engineering Applications Using MatlabDavid DonosoNo ratings yet
- Chap11 (Proc Expand)Document41 pagesChap11 (Proc Expand)smhabbasNo ratings yet
- CDI 63: Advanced Surfacing in Solidworks: Documentation Package ForDocument17 pagesCDI 63: Advanced Surfacing in Solidworks: Documentation Package ForGaurav GuptaNo ratings yet
- Cubic Spline Interpolation: J. R. ShresthaDocument11 pagesCubic Spline Interpolation: J. R. ShresthaSashank GaudelNo ratings yet
- Bezier & B-Spline CurveDocument3 pagesBezier & B-Spline Curveakshay_pundeNo ratings yet
- RCsplinesDocument18 pagesRCsplinesrafael.sebastianNo ratings yet
- 05 - EN Sbirka Matematika 3 57 113 PDFDocument57 pages05 - EN Sbirka Matematika 3 57 113 PDFXDSerAngel BejarMNo ratings yet
- InterpolationDocument24 pagesInterpolationsubha_aeroNo ratings yet
- Approximation Theory PDFDocument24 pagesApproximation Theory PDFvigchaitanya4224No ratings yet
- Blobby ObjectsDocument15 pagesBlobby Objectslarenjose2007No ratings yet
- Atmospheric Ascent Guidance For Rocket-Powered Launch VehiclesDocument11 pagesAtmospheric Ascent Guidance For Rocket-Powered Launch VehiclesBonzi BuddyNo ratings yet
- Cubic SplineDocument19 pagesCubic SplineCindy Chris KePochiNo ratings yet