Download as pdf or txt
You might also like
- Physics1100 Lab Manual (Iolab Revision)Document105 pagesPhysics1100 Lab Manual (Iolab Revision)Tri NguyenNo ratings yet
- Core ManualDocument68 pagesCore ManualLuciano Silva de SouzaNo ratings yet
- Chapter 6 Momentum & Collisions Nice Check ItDocument67 pagesChapter 6 Momentum & Collisions Nice Check Itvenkateshyadav2116100% (1)
- ReportDocument12 pagesReportabdul shaggyNo ratings yet
- Gr18rapport2021 02Document46 pagesGr18rapport2021 02umair saifNo ratings yet
- Chip 8Document52 pagesChip 8manitmeagainNo ratings yet
- Python ScrapyDocument244 pagesPython ScrapyGustavo Meneses PérezNo ratings yet
- Docs Scrapy Org en MasterDocument411 pagesDocs Scrapy Org en MasterPauloNo ratings yet
- Proj PDFDocument222 pagesProj PDFphidrhoNo ratings yet
- An Introduction To Chip-8 Emulation Using The Rust ProgrammingDocument53 pagesAn Introduction To Chip-8 Emulation Using The Rust ProgrammingDanillo SouzaNo ratings yet
- Scrapy-Org DocumentationDocument352 pagesScrapy-Org DocumentationData LiticoNo ratings yet
- PyserialDocument61 pagesPyserialAnurag KumarNo ratings yet
- Py QT 5 TutorialDocument165 pagesPy QT 5 Tutorialandresbe.be8602100% (2)
- ConvertWithMoss ManualDocument13 pagesConvertWithMoss ManualFrançois ClamourNo ratings yet
- MC Propeller Flow Meters: Installation, Operation and Maintenance ManualDocument30 pagesMC Propeller Flow Meters: Installation, Operation and Maintenance ManualEquitec CalibrationNo ratings yet
- Pyserial PDFDocument63 pagesPyserial PDFJayesh ShawNo ratings yet
- Docs Scrapy Org en LatestDocument382 pagesDocs Scrapy Org en LatestDaniela PetranNo ratings yet
- Guide To PySerialDocument61 pagesGuide To PySerialdedyprastyoNo ratings yet
- Py SerialDocument63 pagesPy Serialabuasdiya1No ratings yet
- Docs Scrapy Org en 1.8Document331 pagesDocs Scrapy Org en 1.8Daniela PetranNo ratings yet
- Animatplot Documentation: Release 0.2.2Document33 pagesAnimatplot Documentation: Release 0.2.2masoudNo ratings yet
- Scrapy DocumentationDocument230 pagesScrapy DocumentationSuperquantNo ratings yet
- Docs Scrapy Org en LatestDocument354 pagesDocs Scrapy Org en LatestCesar Marinho EirasNo ratings yet
- Akka ScalaDocument622 pagesAkka ScalaΤάσος ΔήμαςNo ratings yet
- Optical InstrumentsDocument68 pagesOptical Instrumentsallwysmhmd85No ratings yet
- BirdDocument72 pagesBirdbenNo ratings yet
- BIRD 2.0 User's Guide: Ondrej Filip, Pavel Machek, Martin Mares, MariaDocument72 pagesBIRD 2.0 User's Guide: Ondrej Filip, Pavel Machek, Martin Mares, MariaMariuszNo ratings yet
- Scrapy Documentation GuideDocument260 pagesScrapy Documentation GuidessentuNo ratings yet
- Akka Scala ConcurrencyDocument389 pagesAkka Scala ConcurrencyArturo PuenteNo ratings yet
- Multiply Sar Pre ProcessingDocument19 pagesMultiply Sar Pre ProcessingnajmeNo ratings yet
- Automagica Readthedocs Io en Latest PDFDocument146 pagesAutomagica Readthedocs Io en Latest PDFkcmkcmNo ratings yet
- Sverchok Plugin For BlenderDocument167 pagesSverchok Plugin For BlenderartisanicviewNo ratings yet
- Id-11659 Scrapping WebDocument295 pagesId-11659 Scrapping WebBertin BakariNo ratings yet
- Py SerialDocument63 pagesPy SerialPhuwanat PhueakthongNo ratings yet
- ScrapyDocument298 pagesScrapyfedesantillanaNo ratings yet
- Akka ScalaDocument399 pagesAkka ScalaAugustin LucaNo ratings yet
- Self Parking RobotDocument49 pagesSelf Parking RobotAndrei OlaruNo ratings yet
- Zcash Documentation: Release 4.2.0Document48 pagesZcash Documentation: Release 4.2.0Fast FormationsNo ratings yet
- Octavox User Guide PDFDocument18 pagesOctavox User Guide PDFcuentaNo ratings yet
- Production W/ Objekt v0.1: August 18, 2016Document17 pagesProduction W/ Objekt v0.1: August 18, 2016k9lyn100% (1)
- Scikit RF PDFDocument321 pagesScikit RF PDFGarry RFNo ratings yet
- ScrapyDocument306 pagesScrapyLieu Dinh PhungNo ratings yet
- ATM Management SystemDocument25 pagesATM Management SystemHassan Khan100% (1)
- Simplified ModelsDocument35 pagesSimplified ModelscentkiloNo ratings yet
- Updated Matchpool Whitepaper 20MAR17Document10 pagesUpdated Matchpool Whitepaper 20MAR17cibelixNo ratings yet
- DMRC SUMMER TRAINING REPORT - Docs PDFDocument52 pagesDMRC SUMMER TRAINING REPORT - Docs PDFSHERPlaysNo ratings yet
- Manual ItrónDocument68 pagesManual ItrónPaul Ariel MHNo ratings yet
- ATSSDKGuide 750Document208 pagesATSSDKGuide 750Deniz KutanNo ratings yet
- 04 Graph1Document27 pages04 Graph1zdvpbxhpgpmwsckbkmNo ratings yet
- CircuiTikZ 0.8.3 - Massimo Redaelli & Stefan Lindner & Stefan ErhardtDocument68 pagesCircuiTikZ 0.8.3 - Massimo Redaelli & Stefan Lindner & Stefan ErhardtJacobo SimonidesNo ratings yet
- ManualDocument373 pagesManualniradmitra01No ratings yet
- The Heroku Hackers GuideDocument61 pagesThe Heroku Hackers GuideJoel TurnerNo ratings yet
- Plpygis PDFDocument40 pagesPlpygis PDFNurdinYusufNo ratings yet
- Tac Plus PDFDocument74 pagesTac Plus PDFGerardo SegoviaNo ratings yet
- Gplearn Readthedocs Io en StableDocument61 pagesGplearn Readthedocs Io en Stablejuan lopezNo ratings yet
- Audio Sample Selection With Generative Adversarial NetworksDocument80 pagesAudio Sample Selection With Generative Adversarial NetworksJames HillNo ratings yet
- Datawell Manual Waves4 OperatorDocument169 pagesDatawell Manual Waves4 OperatorMarcos Antonio da Rocha Ferreira100% (1)
- Danfoss Install Operation and Manitenance IOM APP1.5-3.5Document70 pagesDanfoss Install Operation and Manitenance IOM APP1.5-3.5warshipvnNo ratings yet
- Akka ScalaDocument771 pagesAkka ScalaSHOGUN131No ratings yet
- drumatomManualDocument19 pagesdrumatomManualPelumi FagbemiNo ratings yet
- BS 7910Document12 pagesBS 7910Mas Arman Tewo50% (2)
- Electrical Engineering Software PDFDocument12 pagesElectrical Engineering Software PDFAkd Deshmukh50% (2)
- 1 s2.0 S0738081X01001997 MainDocument6 pages1 s2.0 S0738081X01001997 MainymiyazyNo ratings yet
- Measurement Sheet For Installetion of Utility BridgeDocument3 pagesMeasurement Sheet For Installetion of Utility BridgeNewaz KabirNo ratings yet
- Seasonal Variations in Kangra Tea QualityDocument6 pagesSeasonal Variations in Kangra Tea QualityashugulatiNo ratings yet
- Kisi Kisi Kelas XiDocument15 pagesKisi Kisi Kelas Xihana zhr0% (1)
- Beauty & Skincare DocketDocument125 pagesBeauty & Skincare DocketShrutiNo ratings yet
- AckermanDocument11 pagesAckermanVansh JainNo ratings yet
- 490806Document2 pages490806Informative InsaanNo ratings yet
- A Situational Analysis of SSF in Malawi - V2V Working Paper No. 2022-3Document16 pagesA Situational Analysis of SSF in Malawi - V2V Working Paper No. 2022-3rajuNo ratings yet
- Certificate of Calibration: Customer InformationDocument2 pagesCertificate of Calibration: Customer InformationSazzath HossainNo ratings yet
- Prisma Illustrated Parts Manual 2002 Photo ViewDocument11 pagesPrisma Illustrated Parts Manual 2002 Photo ViewfernandomeiraNo ratings yet
- Magallona Vs ErmitaDocument13 pagesMagallona Vs ErmitaERNIL L BAWA100% (1)
- Continuous FunctionsDocument11 pagesContinuous FunctionsisraeljumboNo ratings yet
- Atomic Physics - QB - May 2022Document36 pagesAtomic Physics - QB - May 2022Vera BlackNo ratings yet
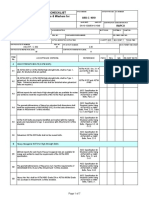
- ASU-C-1010 (Receiving Inspection - Bolts, Nuts & Washers For Structural Connections) 14122016Document7 pagesASU-C-1010 (Receiving Inspection - Bolts, Nuts & Washers For Structural Connections) 14122016Bhavanishankar ShettyNo ratings yet
- B.Tech UG Project Ideas 4Document11 pagesB.Tech UG Project Ideas 4nambimunnaNo ratings yet
- Model: AGB2518ZKZ (TAG2522Z) : Technical Data SheetDocument1 pageModel: AGB2518ZKZ (TAG2522Z) : Technical Data SheetZikko Firmansyah100% (2)
- 144 MHZ Preamplifier With BF981Document4 pages144 MHZ Preamplifier With BF981César PazNo ratings yet
- Topic 2Document9 pagesTopic 2Ria AccadNo ratings yet
- Cloud WarsDocument10 pagesCloud WarsAtharva Sachin KulkarniNo ratings yet
- IV.1.39.01 Impulse Valve Low Pressure SwitchDocument1 pageIV.1.39.01 Impulse Valve Low Pressure SwitchNestor RodriguezNo ratings yet
- Inta Commercial Collection April 2011Document59 pagesInta Commercial Collection April 2011Robin FisherNo ratings yet
- Jaka Index6 PDFDocument85 pagesJaka Index6 PDFFábio Origuela de LiraNo ratings yet
- METHOD OF WORK - ELEVATION WORK PROCEDURE WITH CHAIN BLOCK Pump GFDocument5 pagesMETHOD OF WORK - ELEVATION WORK PROCEDURE WITH CHAIN BLOCK Pump GFCarlos ImmanuelNo ratings yet
- DidiDocument12 pagesDidiAndreea DamianNo ratings yet
- GRK-CV-17CV741-DESIGN OF BRIDGES - MODULE - 2 (DESIGN OF DECK SLAB) - Deck Slab - 11Document24 pagesGRK-CV-17CV741-DESIGN OF BRIDGES - MODULE - 2 (DESIGN OF DECK SLAB) - Deck Slab - 11monikaNo ratings yet
- The Story That Must Not Be Told by Kavery NambisanDocument6 pagesThe Story That Must Not Be Told by Kavery Nambisanfreelancer800100% (1)