Download as pdf or txt
You might also like
- Sfar 88 Fuel Tank Safety Level 2 - Test 2018Document6 pagesSfar 88 Fuel Tank Safety Level 2 - Test 2018william100% (2)
- Sfar 88 Fuel Tank Safety Level 2 - Test 2018Document6 pagesSfar 88 Fuel Tank Safety Level 2 - Test 2018william100% (2)
- Sfar 88 Fuel Tank Safety Level 2 - Test 2018Document6 pagesSfar 88 Fuel Tank Safety Level 2 - Test 2018william100% (2)
- (Mathematical Readiness) - 5 - Summation of Indexed DataDocument3 pages(Mathematical Readiness) - 5 - Summation of Indexed DataMarco FragosoNo ratings yet
- Paper 01 - Control DesignDocument20 pagesPaper 01 - Control Designnafayzaman03No ratings yet
- AD1043317Document22 pagesAD1043317Thakur B PNo ratings yet
- Hybrid-Electric Aero-Propulsion Controls Testbed ResultsDocument30 pagesHybrid-Electric Aero-Propulsion Controls Testbed Resultsviscontilore97No ratings yet
- 4 Operational Condition and Superfinishing Effect onDocument20 pages4 Operational Condition and Superfinishing Effect ontpazminoNo ratings yet
- Ignitor Lox Methane-2.PDF Very GoodDocument28 pagesIgnitor Lox Methane-2.PDF Very GoodGirish UtageNo ratings yet
- Stirling Convertor Control For A Concept Rover at NASA Glenn Research CenterDocument20 pagesStirling Convertor Control For A Concept Rover at NASA Glenn Research Center강태욱No ratings yet
- Intelligent Engine Systems: Adaptive ControlDocument85 pagesIntelligent Engine Systems: Adaptive ControlLee JamesNo ratings yet
- Nasa - TVTDocument32 pagesNasa - TVTluisNo ratings yet
- Active Combustion Control For Aircraft Gas-Turbine Engines-Experimental Results For An Advanced, Low-Emissions Combustor PrototypeDocument25 pagesActive Combustion Control For Aircraft Gas-Turbine Engines-Experimental Results For An Advanced, Low-Emissions Combustor PrototypeLuca BozziNo ratings yet
- Application of NiTi in Jet EngineDocument17 pagesApplication of NiTi in Jet Engineswaminathan G.No ratings yet
- NASA-TM-2012-217252 Full-Scale Turbofan-Engine Turbine-Transfer Function Determination Using Three Internal SensorsDocument20 pagesNASA-TM-2012-217252 Full-Scale Turbofan-Engine Turbine-Transfer Function Determination Using Three Internal SensorsMarek CelNo ratings yet
- Axial and Centrifugal Compressor Mean Line Flow Analysis MethodDocument38 pagesAxial and Centrifugal Compressor Mean Line Flow Analysis Methodtadele10No ratings yet
- The GE-NASA RTA Hyperburner Design and DevelopmentDocument22 pagesThe GE-NASA RTA Hyperburner Design and DevelopmentSadewo YaktiNo ratings yet
- Experimental Performance Evaluation of A High Speed Permanent Magnet Synchronous Motor and Drive For A Flywheel Application at Different FrequenciesDocument13 pagesExperimental Performance Evaluation of A High Speed Permanent Magnet Synchronous Motor and Drive For A Flywheel Application at Different FrequenciesrasoolNo ratings yet
- APEX 3D Propeller Test Preliminary Design: NASA/CR-2002-211866Document35 pagesAPEX 3D Propeller Test Preliminary Design: NASA/CR-2002-211866Abrham B. GMNo ratings yet
- Automated Power Assessment For Turboshaft EnginesDocument15 pagesAutomated Power Assessment For Turboshaft EnginesMustafaAl-ShawafNo ratings yet
- System-Level Control Concepts N210026284Document22 pagesSystem-Level Control Concepts N210026284skr2010No ratings yet
- ReportDocument18 pagesReportShyam KumarNo ratings yet
- NASAS CR2 Flywheel Generator - 20060028492Document20 pagesNASAS CR2 Flywheel Generator - 20060028492olim owletNo ratings yet
- The Role of Radial Clearance On The Performance of Foil Air BearingsDocument19 pagesThe Role of Radial Clearance On The Performance of Foil Air BearingswataruNo ratings yet
- Passive Endwall Treatments For Enhancing Stability PDFDocument78 pagesPassive Endwall Treatments For Enhancing Stability PDFSơn HustmanNo ratings yet
- TM 2006 214343Document22 pagesTM 2006 214343rahulmecNo ratings yet
- Effects of A Rotating Aerodynamic Probe On The Flow Field of A Compressor RotorDocument27 pagesEffects of A Rotating Aerodynamic Probe On The Flow Field of A Compressor RotorUmair MunirNo ratings yet
- An Assessment of Gas Foil Bearing Scalability and The Potential Benefi Ts To Civilian Turbofan EnginesDocument14 pagesAn Assessment of Gas Foil Bearing Scalability and The Potential Benefi Ts To Civilian Turbofan EnginesrahulmecNo ratings yet
- Fan FlutterDocument13 pagesFan FlutterJaiganesh SelvarajNo ratings yet
- Investigation of Exoskeletal Engine Propulsion System ConceptDocument93 pagesInvestigation of Exoskeletal Engine Propulsion System ConceptMir yahyaNo ratings yet
- Component-Level Electronic-Assembly Repair (CLEAR) Spacecraft Circuit Diagnostics by Analog and Complex Signature AnalysisDocument37 pagesComponent-Level Electronic-Assembly Repair (CLEAR) Spacecraft Circuit Diagnostics by Analog and Complex Signature AnalysisasmonovNo ratings yet
- Enhanced Fan Noise Modeling For Turbofan EnginesDocument92 pagesEnhanced Fan Noise Modeling For Turbofan EnginesLi LiNo ratings yet
- Practical Techniques For Modeling Gas Turbine Engine PerformanceDocument26 pagesPractical Techniques For Modeling Gas Turbine Engine PerformanceAnu ParthaNo ratings yet
- Development of A Turbofan Engine Simulation in A Graphical Simulation EnvironmentDocument19 pagesDevelopment of A Turbofan Engine Simulation in A Graphical Simulation EnvironmentsergukesikNo ratings yet
- Swirl BrakeDocument80 pagesSwirl BrakesturbineNo ratings yet
- ADA378073Document10 pagesADA378073leeNo ratings yet
- NASA PowerDocument24 pagesNASA PowerPrathune KailashNo ratings yet
- Supersonic Free-Jet Combustion in A Ramjet Burner: NASA/TM-2010-216932 AIAA-2010-6643Document32 pagesSupersonic Free-Jet Combustion in A Ramjet Burner: NASA/TM-2010-216932 AIAA-2010-6643AS WI NNo ratings yet
- Integrated Turbine Tip Clearance and Gas Turbine Engine SimulationDocument24 pagesIntegrated Turbine Tip Clearance and Gas Turbine Engine Simulationmohamad TomcatNo ratings yet
- Measurement of Flow Pattern Within A Rotating Stall Cell in An Axial CompressorDocument18 pagesMeasurement of Flow Pattern Within A Rotating Stall Cell in An Axial CompressorUmair MunirNo ratings yet
- Nasa CC3Document332 pagesNasa CC3esra kadriye akgülNo ratings yet
- Nasa Axial 35 CFDDocument19 pagesNasa Axial 35 CFDmick.pride81No ratings yet
- A Model To Assess The Risk of Ice Accretion Due ToDocument1,666 pagesA Model To Assess The Risk of Ice Accretion Due ToTudorache BogdanNo ratings yet
- Sequential Combustion ModelingDocument24 pagesSequential Combustion ModelingAnu ParthaNo ratings yet
- Combined Experimental and Numerical Simulations of Thermal Barrier Coated Turbine Blades ErosionDocument28 pagesCombined Experimental and Numerical Simulations of Thermal Barrier Coated Turbine Blades ErosionmoussaouiNo ratings yet
- REview of CFD Methods NASADocument28 pagesREview of CFD Methods NASAaliNo ratings yet
- LINFLUX-AE: A Turbomachinery Aeroelastic Code Based On A 3-D Linearized Euler SolverDocument42 pagesLINFLUX-AE: A Turbomachinery Aeroelastic Code Based On A 3-D Linearized Euler Solvercerden1998No ratings yet
- Modular Stirling Radioisotope Generator: NASA/TM-2016-218911 AIAA-2015-3809Document18 pagesModular Stirling Radioisotope Generator: NASA/TM-2016-218911 AIAA-2015-3809tulzafoundationNo ratings yet
- Modeling Aircraft Wing Loads From Flight Data Using Neural NetworksDocument20 pagesModeling Aircraft Wing Loads From Flight Data Using Neural NetworksPrasath PandianNo ratings yet
- Determination of Rolling-Element Fatigue Life From Computer Generated Bearing TestsDocument28 pagesDetermination of Rolling-Element Fatigue Life From Computer Generated Bearing TestsItalo Esquivel VeraNo ratings yet
- TURBOMAT: A Probabilistic Turbomachinery Aeroelastic Analysis ToolDocument42 pagesTURBOMAT: A Probabilistic Turbomachinery Aeroelastic Analysis Toolcerden1998No ratings yet
- SkyshipDocument22 pagesSkyshipTasko SadikovicNo ratings yet
- Sealing in TurbomachineryDocument62 pagesSealing in Turbomachineryjparmar100% (1)
- GRC Supporting Technology For NASA's Advanced Stirling Radioisotope Generator (ASRG)Document19 pagesGRC Supporting Technology For NASA's Advanced Stirling Radioisotope Generator (ASRG)rasoolNo ratings yet
- Misalignment in Gas Foil Journal Bearings: An Experimental StudyDocument20 pagesMisalignment in Gas Foil Journal Bearings: An Experimental StudyZahir KhiraNo ratings yet
- GT2 Gas TurbineDocument26 pagesGT2 Gas Turbine19BGita Aldostera PHNo ratings yet
- Overview of The Development and Mission Application of The Advanced Electric Propulsion System (AEPS)Document24 pagesOverview of The Development and Mission Application of The Advanced Electric Propulsion System (AEPS)SOURAV GHIMIREYNo ratings yet
- Ada 406155Document19 pagesAda 406155rahulmecNo ratings yet
- NASA-CR-2014-218537 Supersonic Wing Optimization Using SpaRibs - 2014Document31 pagesNASA-CR-2014-218537 Supersonic Wing Optimization Using SpaRibs - 2014Konstantin PredachenkoNo ratings yet
- A Study of Highly Underexpanded Supersonic Jets N210024918Document20 pagesA Study of Highly Underexpanded Supersonic Jets N210024918skr2010No ratings yet
- NASA GlennICE ModelDocument26 pagesNASA GlennICE Modelecitimo raqinNo ratings yet
- Gear Tooth Wear Detection Algorithm: NASA/TM-2015-218830Document20 pagesGear Tooth Wear Detection Algorithm: NASA/TM-2015-218830Huseyin CakmakNo ratings yet
- The Performance of A Subsonic Diffuser Designed For High Speed Turbojet-Propelled FlightDocument34 pagesThe Performance of A Subsonic Diffuser Designed For High Speed Turbojet-Propelled FlightDhanush NambrathNo ratings yet
- Science and Technology: The Making of the Air Force Research LaboratoryFrom EverandScience and Technology: The Making of the Air Force Research LaboratoryNo ratings yet
- Military Applications For IoT Thesis Rune LangleiteDocument186 pagesMilitary Applications For IoT Thesis Rune LangleitewilliamNo ratings yet
- 6ED10554MH080BA1 Datasheet enDocument2 pages6ED10554MH080BA1 Datasheet enwilliamNo ratings yet
- Hamoud Alafnan Thesis EditedDocument200 pagesHamoud Alafnan Thesis EditedwilliamNo ratings yet
- 1959-Article Text-8397-1-10-20220825Document7 pages1959-Article Text-8397-1-10-20220825williamNo ratings yet
- Fuzzy Logic Control of Synchronous Generator Under The Condition of Transient Three Phase Short CircuitDocument5 pagesFuzzy Logic Control of Synchronous Generator Under The Condition of Transient Three Phase Short CircuitwilliamNo ratings yet
- f25ff54b-7ba8-4da3-a015-83749465498bDocument338 pagesf25ff54b-7ba8-4da3-a015-83749465498bwilliamNo ratings yet
- Research ArticleDocument7 pagesResearch ArticlewilliamNo ratings yet
- Fuzzy PID Control Technology For Synchronous Generator ExcitationDocument8 pagesFuzzy PID Control Technology For Synchronous Generator ExcitationwilliamNo ratings yet
- Excitation Control of Synchronous Generators Using Fuzzy TechniqueDocument6 pagesExcitation Control of Synchronous Generators Using Fuzzy TechniquewilliamNo ratings yet
- Advances in Solid State Switchgear Technology For Large Space Power SystemsDocument21 pagesAdvances in Solid State Switchgear Technology For Large Space Power SystemswilliamNo ratings yet
- Solid Power: StateDocument86 pagesSolid Power: StatewilliamNo ratings yet
- High-Voltage, High-Power, Solid-State Remote Power Controllers For Aerospace ApplicationsDocument35 pagesHigh-Voltage, High-Power, Solid-State Remote Power Controllers For Aerospace ApplicationswilliamNo ratings yet
- Lyndon: In-LineDocument382 pagesLyndon: In-LinewilliamNo ratings yet
- Flight: Check-Up Targets Efforts To Mitigate Complexity of Flight Guidance SystemsDocument6 pagesFlight: Check-Up Targets Efforts To Mitigate Complexity of Flight Guidance SystemswilliamNo ratings yet
- 19710025563Document27 pages19710025563williamNo ratings yet
- One Shot Balancing PDFDocument4 pagesOne Shot Balancing PDFwilliamNo ratings yet
- Solid-State Secondary Power Distribution: DOT/FAA/TC-13/19Document182 pagesSolid-State Secondary Power Distribution: DOT/FAA/TC-13/19williamNo ratings yet
- Kutt Filip PHD ZabDocument164 pagesKutt Filip PHD ZabwilliamNo ratings yet
- Principle of Arc Fault Detection For Solid State Power ControllerDocument7 pagesPrinciple of Arc Fault Detection For Solid State Power ControllerwilliamNo ratings yet
- 34 For Reference OnlyDocument1 page34 For Reference OnlywilliamNo ratings yet
- 2004 Thesis Design of An Autopilot For Small Unmanned Aerial VehiclesDocument258 pages2004 Thesis Design of An Autopilot For Small Unmanned Aerial VehicleswilliamNo ratings yet
- 757-767 Study GuideDocument176 pages757-767 Study GuideThanhoa Vo100% (1)
- Powerprotect DP Series Appliance Administration: Course DescriptionDocument3 pagesPowerprotect DP Series Appliance Administration: Course DescriptionSajuNo ratings yet
- Job Description - Principal Technical ArchitectDocument3 pagesJob Description - Principal Technical Architectmiguel ángel pelosNo ratings yet
- New Zealand Mobile & Mobile Broadband TrainingDocument11 pagesNew Zealand Mobile & Mobile Broadband TrainingAbdulqader HNo ratings yet
- Minimalism - Tubular BellsDocument2 pagesMinimalism - Tubular BellshodiestoeNo ratings yet
- Guideline On Writing A First Quantitative Academic Article YYS)Document1 pageGuideline On Writing A First Quantitative Academic Article YYS)Isan Yys SanNo ratings yet
- Q3-CSS11 - Las 2Document9 pagesQ3-CSS11 - Las 2jazel aquinoNo ratings yet
- 2 TI/TC/ NCVT Certificate (Fitter/ Turner/Machinist) : - CNC Nos)Document2 pages2 TI/TC/ NCVT Certificate (Fitter/ Turner/Machinist) : - CNC Nos)venkatcipetNo ratings yet
- Study of Impact of Automation On Industry Employees Sonali JadhavDocument11 pagesStudy of Impact of Automation On Industry Employees Sonali Jadhavpallavimemane4No ratings yet
- 2013 Sappia BollatiDocument7 pages2013 Sappia BollatiRakshithNo ratings yet
- Bedienungs-Und Wartungsanleitung: Operating and Maintenance InstructionsDocument17 pagesBedienungs-Und Wartungsanleitung: Operating and Maintenance Instructionsuuur35No ratings yet
- Fagor 8055tcDocument50 pagesFagor 8055tcKamil BabiarzNo ratings yet
- Ficha Mang Oxiacetileno BalflexDocument1 pageFicha Mang Oxiacetileno BalflexJUANPANIAGUANo ratings yet
- Discussion SamplesDocument5 pagesDiscussion SamplesvusalaNo ratings yet
- Data Communication Errors: Networking 2Document24 pagesData Communication Errors: Networking 2Leonelyn Hermosa Gasco - CosidoNo ratings yet
- Microprocessor 8251: Presentation On Different Aspects of 8251 USARTDocument5 pagesMicroprocessor 8251: Presentation On Different Aspects of 8251 USARTMizanur RafiNo ratings yet
- HD 973P Parking Lift Manual 5175238 BendPakDocument92 pagesHD 973P Parking Lift Manual 5175238 BendPakHector VertizNo ratings yet
- Nema WD1 - 1999Document6 pagesNema WD1 - 1999warwarkingNo ratings yet
- Organisation of Data PDFDocument4 pagesOrganisation of Data PDFbansallove2008No ratings yet
- Cilindro TZ-W34Document57 pagesCilindro TZ-W34keyla portelaNo ratings yet
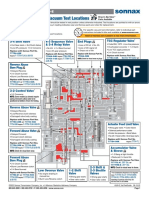
- 4L60-E VacTestGuideDocument4 pages4L60-E VacTestGuideJailton GomesNo ratings yet
- Hoja de Datos Del Procesador Familia 15h Model AmdDocument13 pagesHoja de Datos Del Procesador Familia 15h Model Amdmario nogueraNo ratings yet
- Solid-Liquid Separation For Pretreatment of Drying OperationDocument20 pagesSolid-Liquid Separation For Pretreatment of Drying OperationNoel GatbontonNo ratings yet
- Kumpulan CD-Key KomputerDocument4 pagesKumpulan CD-Key KomputerKemz MayyerNo ratings yet
- Iso 24409 1 2010Document11 pagesIso 24409 1 2010Faker DAOUDNo ratings yet
- SAP Innovation Management: A Detailed ViewDocument37 pagesSAP Innovation Management: A Detailed ViewXimeta SelectNo ratings yet
- NN VI Two-PagerDocument2 pagesNN VI Two-PagerEndalkNo ratings yet
- Super Blood Harvest 3 PDFDocument68 pagesSuper Blood Harvest 3 PDFJoseph McLachlanNo ratings yet
- 07.08.13-2231 EN Check Push Button ControllerDocument1 page07.08.13-2231 EN Check Push Button ControllerJezrell JaravataNo ratings yet
- Cloud Native Programming GolangDocument400 pagesCloud Native Programming Golanghacker anhNo ratings yet