Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Report On Century Pulp & PaperDocument43 pagesReport On Century Pulp & Paperyashaahmadnasiaahmad91% (11)
- Vertical Mixed-Use Communities: A Solution To Urban Sustainability? Review, Audit and Developer PerspectivesDocument18 pagesVertical Mixed-Use Communities: A Solution To Urban Sustainability? Review, Audit and Developer PerspectivesSamuel MoraNo ratings yet
- DecorOpal ENG PDFDocument2 pagesDecorOpal ENG PDFSamuel MoraNo ratings yet
- To Guarantee The Effectiveness, Decoropal: Antarctic Perla Ghiaccio NeveDocument2 pagesTo Guarantee The Effectiveness, Decoropal: Antarctic Perla Ghiaccio NeveSamuel MoraNo ratings yet
- DIAGRAMS ARE GUIDELINES ONLY: Parts Indicated May Not Be Included With Your PoleDocument1 pageDIAGRAMS ARE GUIDELINES ONLY: Parts Indicated May Not Be Included With Your PoleSamuel MoraNo ratings yet
- GuidetoSafety at SportsgroundDocument79 pagesGuidetoSafety at SportsgroundSamuel MoraNo ratings yet
- Colorcoat Prisma Colour CardDocument11 pagesColorcoat Prisma Colour CardSamuel MoraNo ratings yet
- Concrete Slab Cast On Arctic PermafrostDocument2 pagesConcrete Slab Cast On Arctic PermafrostSamuel MoraNo ratings yet
- Kraftwerks K Series Race Supercharger Kit (C38) K Series PartsDocument1 pageKraftwerks K Series Race Supercharger Kit (C38) K Series PartsAndres GigenaNo ratings yet
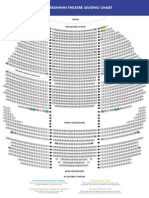
- The Gershwin Theatre Seating Chart: StageDocument1 pageThe Gershwin Theatre Seating Chart: StageCharles DavidsonNo ratings yet
- Abhishek Shukla Project Reporton (Power Purchase)Document57 pagesAbhishek Shukla Project Reporton (Power Purchase)beast singhNo ratings yet
- IOT Based Waste Monitoring SystemDocument25 pagesIOT Based Waste Monitoring SystemMayur ShimpiNo ratings yet
- Ae tt1021 Grammar Worksheet 18Document1 pageAe tt1021 Grammar Worksheet 18Carmen TeixeiraNo ratings yet
- Danish Progressive RockDocument26 pagesDanish Progressive RockrpilNo ratings yet
- 1454665129905-MNRE Empanelled Agency-All India PDFDocument25 pages1454665129905-MNRE Empanelled Agency-All India PDFAurobindo SaxenaNo ratings yet
- Bar Charts in ResearchDocument5 pagesBar Charts in ResearchPraise NehumambiNo ratings yet
- Scavenger Hunt AmsterdamDocument8 pagesScavenger Hunt Amsterdamkarlijn2No ratings yet
- 2001 Headshok Bearing Migration Inspection Instructions enDocument2 pages2001 Headshok Bearing Migration Inspection Instructions enMohamed Abdel HamidNo ratings yet
- 2-Design of HRISDocument34 pages2-Design of HRISRicha GargNo ratings yet
- Replace Left Hand Wheel Speed Sensor (Fittings Rear Axle 1)Document6 pagesReplace Left Hand Wheel Speed Sensor (Fittings Rear Axle 1)Ovidijus JankauskasNo ratings yet
- Missionary Recommendation Physician Dental FormDocument5 pagesMissionary Recommendation Physician Dental FormdozieojiakuNo ratings yet
- Sony PCM-7040 1st EdDocument81 pagesSony PCM-7040 1st EdnicureddogsfloNo ratings yet
- Risk Management in Islamic BankingDocument17 pagesRisk Management in Islamic BankingEdi SusiloNo ratings yet
- Anti TB Hospital DaskaDocument11 pagesAnti TB Hospital DaskaWaqas ShamshadNo ratings yet
- DrupalDocument344 pagesDrupalMike Nall100% (4)
- DR - Nitish Kumar - CV ..Document6 pagesDR - Nitish Kumar - CV ..ABHISHEK SINGHNo ratings yet
- climateChangeStat2015 PDFDocument294 pagesclimateChangeStat2015 PDFPallaviNo ratings yet
- Aircraft Material & Production - MANUALDocument45 pagesAircraft Material & Production - MANUALKV Yashwanth100% (1)
- Thesis Format Iit KanpurDocument7 pagesThesis Format Iit Kanpurvictoriathompsonaustin100% (2)
- Fortis Shalimar Bagh - First Floor Hvac DBR (24.02.2021)Document25 pagesFortis Shalimar Bagh - First Floor Hvac DBR (24.02.2021)VishalKhuranaNo ratings yet
- English Holiday HomeworkDocument18 pagesEnglish Holiday Homeworkzainab.syed017No ratings yet
- Aspekto NG Pandiwa - WorksheetDocument3 pagesAspekto NG Pandiwa - WorksheetDiadema Gawaen100% (2)
- Active and Passive VoiceDocument3 pagesActive and Passive VoiceCray CrayNo ratings yet
- Continental Device India Limited: Silicon Epitaxial TransistorDocument3 pagesContinental Device India Limited: Silicon Epitaxial TransistorRaymundo Moran LopezNo ratings yet
- Classification of HotelsDocument14 pagesClassification of HotelsJeevesh ViswambharanNo ratings yet
- Obesidade 2023Document69 pagesObesidade 2023Belinha DonattiNo ratings yet
- Lesson Plan ON OxytocicsDocument18 pagesLesson Plan ON Oxytocicsrenu100% (2)