
ELEG3924 ch11
ELEG3924 ch11
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- AGV Project ReportDocument46 pagesAGV Project ReportPratheesh Pala100% (7)
- Power Fluctuation Alleviation Using Cascade Statcoms With Energy Storages For Wind Farm ApplicationsDocument6 pagesPower Fluctuation Alleviation Using Cascade Statcoms With Energy Storages For Wind Farm ApplicationsjoNo ratings yet
- Microcontroller Based Digital Code Lock: Bachelor of TechnologyDocument50 pagesMicrocontroller Based Digital Code Lock: Bachelor of TechnologyjoNo ratings yet
- Improvement of Voltage Stability Due To Integration of The Celukan Bawang Power Station To The Bali 16-Bus SystemDocument5 pagesImprovement of Voltage Stability Due To Integration of The Celukan Bawang Power Station To The Bali 16-Bus SystemjoNo ratings yet
- Chap 9Document64 pagesChap 9joNo ratings yet
- 179 Load IeeeDocument7 pages179 Load IeeejoNo ratings yet
- Transient Stability Improvement Via Combined Method: Journal of Electrical Engineering December 2011Document8 pagesTransient Stability Improvement Via Combined Method: Journal of Electrical Engineering December 2011joNo ratings yet
- Power Quality Improvement Using Facts Device (Statcom)Document6 pagesPower Quality Improvement Using Facts Device (Statcom)joNo ratings yet
- Sensors: Real-Time Performance of A Self-Powered Environmental Iot Sensor Network SystemDocument14 pagesSensors: Real-Time Performance of A Self-Powered Environmental Iot Sensor Network SystemjoNo ratings yet
- Akas Engineering and Trading SDN BHD - Kepala Batas. Penang. MalaysiaDocument5 pagesAkas Engineering and Trading SDN BHD - Kepala Batas. Penang. MalaysiajoNo ratings yet
- Street LightDocument4 pagesStreet LightjoNo ratings yet
- 17 AppendicesDocument18 pages17 AppendicesjoNo ratings yet
- Industrial Training Technical Report: Universisti Teknikal Malaysia MelakaDocument37 pagesIndustrial Training Technical Report: Universisti Teknikal Malaysia MelakajoNo ratings yet
- Chap 3 SolutionsDocument39 pagesChap 3 SolutionsFeliscio Ascione Felicio100% (1)
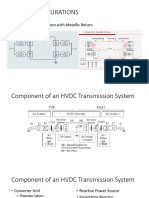
- HVDC Configurations: Monopolar HVDC System With Metallic ReturnDocument4 pagesHVDC Configurations: Monopolar HVDC System With Metallic ReturnjoNo ratings yet
- HVDC TransDocument67 pagesHVDC Transjo100% (1)
- Chap 6 SolnsDocument2 pagesChap 6 SolnsjoNo ratings yet
- 925-General Donation PDFDocument1 page925-General Donation PDFjoNo ratings yet
- Nptel: High Voltage DC Transmission - Web CourseDocument2 pagesNptel: High Voltage DC Transmission - Web Coursekmd_venkatsubbu0% (1)
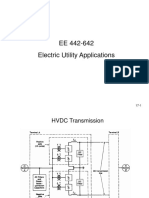
- Utility ApplicationsDocument28 pagesUtility ApplicationsjoNo ratings yet
- Ch17 PDFDocument18 pagesCh17 PDFjoNo ratings yet
- Exercise: Xercise BjectiveDocument36 pagesExercise: Xercise BjectivejoNo ratings yet
- GSM Based Automatic Energy Meter Reading System With Instant BillingDocument8 pagesGSM Based Automatic Energy Meter Reading System With Instant BillingAjay SharmaNo ratings yet
- Lec1 Operating SystemDocument33 pagesLec1 Operating SystemMirna AttallahNo ratings yet
- Mechatronics EngineeringDocument128 pagesMechatronics EngineeringAkarsh ManojNo ratings yet
- Ece 3-2 Cs Syllabus - Ug - r20Document113 pagesEce 3-2 Cs Syllabus - Ug - r20Jøhn WeßłeyNo ratings yet
- MCES - IA 1-SolutionDocument8 pagesMCES - IA 1-Solutiongokul.shreerajNo ratings yet
- Mini Project SrihariDocument14 pagesMini Project SrihariAshik GRNo ratings yet
- Topic #1 - IntroductionDocument23 pagesTopic #1 - IntroductionDavidNo ratings yet
- EmbOS GenericDocument324 pagesEmbOS Genericbogd33No ratings yet
- 715ect04 Embedded Systems Notes - All UnitsDocument241 pages715ect04 Embedded Systems Notes - All UnitssumathiNo ratings yet
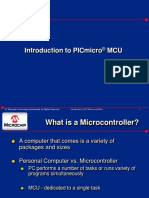
- Introduction To Picmicro McuDocument35 pagesIntroduction To Picmicro McuBonay BalotNo ratings yet
- Literature Review of Water Level ControllerDocument5 pagesLiterature Review of Water Level Controllerfvesdf9j100% (1)
- Arduino Based Home Automation Using Android ApplicationDocument5 pagesArduino Based Home Automation Using Android ApplicationMihai BogdanNo ratings yet
- Bus Detection For Blind PeopleDocument6 pagesBus Detection For Blind PeoplefathimaNo ratings yet
- Wireless Data Transmission Cum Data Acquisition Through IOT in Industrial EnvironmentDocument7 pagesWireless Data Transmission Cum Data Acquisition Through IOT in Industrial EnvironmentkhozainuzNo ratings yet
- Introduction To Microcontrollers: Department of EIE / Pondicherry Engineering CollegeDocument12 pagesIntroduction To Microcontrollers: Department of EIE / Pondicherry Engineering Collegeprof_kt100% (1)
- Lab Manual Advanced MicrocontrollerDocument79 pagesLab Manual Advanced MicrocontrollertrippinNo ratings yet
- Water Level Controller and Traffic Light Controler Using 8051Document5 pagesWater Level Controller and Traffic Light Controler Using 8051arunambrose2004No ratings yet
- Contents:-: Temperature Sensor and ControlDocument34 pagesContents:-: Temperature Sensor and ControlTarun Gupta100% (4)
- Presented By: Divya DhawanDocument35 pagesPresented By: Divya DhawanAkash BhardwajNo ratings yet
- RZLLCW - GS REV0.0.2 GroundStudio Jade Nano+ PinoutDocument1 pageRZLLCW - GS REV0.0.2 GroundStudio Jade Nano+ PinoutBIosFileNo ratings yet
- Programming With ArduinoDocument30 pagesProgramming With ArduinoTriều NguyễnNo ratings yet
- Microcontroller Based Dam Gate Control SystemDocument6 pagesMicrocontroller Based Dam Gate Control SystemVishal Subhash patilNo ratings yet
- Using An Application Programming Interface API To Simplify Mil STD 1553 Designs - Whitepaperpdf.renderDocument11 pagesUsing An Application Programming Interface API To Simplify Mil STD 1553 Designs - Whitepaperpdf.rendertejk79No ratings yet
- Atmel 7810 Automotive Microcontrollers ATmega328P - Datasheet PDFDocument294 pagesAtmel 7810 Automotive Microcontrollers ATmega328P - Datasheet PDFnagendra2195No ratings yet
- Mip 2 2008Document94 pagesMip 2 2008majid_ak13833No ratings yet
- Foggy RoadsDocument62 pagesFoggy Roadssudhakar5472No ratings yet
- Automated Bill To Coin Money Exchanger (Philippine Peso)Document13 pagesAutomated Bill To Coin Money Exchanger (Philippine Peso)NicoNo ratings yet
- Project Awd ReportDocument15 pagesProject Awd Reportyoubora2903No ratings yet
- An 10302Document14 pagesAn 10302Kyler GreenwayNo ratings yet

























































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5820)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- AGV Project ReportDocument46 pagesAGV Project ReportPratheesh Pala100% (7)
- Power Fluctuation Alleviation Using Cascade Statcoms With Energy Storages For Wind Farm ApplicationsDocument6 pagesPower Fluctuation Alleviation Using Cascade Statcoms With Energy Storages For Wind Farm ApplicationsjoNo ratings yet
- Microcontroller Based Digital Code Lock: Bachelor of TechnologyDocument50 pagesMicrocontroller Based Digital Code Lock: Bachelor of TechnologyjoNo ratings yet
- Improvement of Voltage Stability Due To Integration of The Celukan Bawang Power Station To The Bali 16-Bus SystemDocument5 pagesImprovement of Voltage Stability Due To Integration of The Celukan Bawang Power Station To The Bali 16-Bus SystemjoNo ratings yet
- Chap 9Document64 pagesChap 9joNo ratings yet
- 179 Load IeeeDocument7 pages179 Load IeeejoNo ratings yet
- Transient Stability Improvement Via Combined Method: Journal of Electrical Engineering December 2011Document8 pagesTransient Stability Improvement Via Combined Method: Journal of Electrical Engineering December 2011joNo ratings yet
- Power Quality Improvement Using Facts Device (Statcom)Document6 pagesPower Quality Improvement Using Facts Device (Statcom)joNo ratings yet
- Sensors: Real-Time Performance of A Self-Powered Environmental Iot Sensor Network SystemDocument14 pagesSensors: Real-Time Performance of A Self-Powered Environmental Iot Sensor Network SystemjoNo ratings yet
- Akas Engineering and Trading SDN BHD - Kepala Batas. Penang. MalaysiaDocument5 pagesAkas Engineering and Trading SDN BHD - Kepala Batas. Penang. MalaysiajoNo ratings yet
- Street LightDocument4 pagesStreet LightjoNo ratings yet
- 17 AppendicesDocument18 pages17 AppendicesjoNo ratings yet
- Industrial Training Technical Report: Universisti Teknikal Malaysia MelakaDocument37 pagesIndustrial Training Technical Report: Universisti Teknikal Malaysia MelakajoNo ratings yet
- Chap 3 SolutionsDocument39 pagesChap 3 SolutionsFeliscio Ascione Felicio100% (1)
- HVDC Configurations: Monopolar HVDC System With Metallic ReturnDocument4 pagesHVDC Configurations: Monopolar HVDC System With Metallic ReturnjoNo ratings yet
- HVDC TransDocument67 pagesHVDC Transjo100% (1)
- Chap 6 SolnsDocument2 pagesChap 6 SolnsjoNo ratings yet
- 925-General Donation PDFDocument1 page925-General Donation PDFjoNo ratings yet
- Nptel: High Voltage DC Transmission - Web CourseDocument2 pagesNptel: High Voltage DC Transmission - Web Coursekmd_venkatsubbu0% (1)
- Utility ApplicationsDocument28 pagesUtility ApplicationsjoNo ratings yet
- Ch17 PDFDocument18 pagesCh17 PDFjoNo ratings yet
- Exercise: Xercise BjectiveDocument36 pagesExercise: Xercise BjectivejoNo ratings yet
- GSM Based Automatic Energy Meter Reading System With Instant BillingDocument8 pagesGSM Based Automatic Energy Meter Reading System With Instant BillingAjay SharmaNo ratings yet
- Lec1 Operating SystemDocument33 pagesLec1 Operating SystemMirna AttallahNo ratings yet
- Mechatronics EngineeringDocument128 pagesMechatronics EngineeringAkarsh ManojNo ratings yet
- Ece 3-2 Cs Syllabus - Ug - r20Document113 pagesEce 3-2 Cs Syllabus - Ug - r20Jøhn WeßłeyNo ratings yet
- MCES - IA 1-SolutionDocument8 pagesMCES - IA 1-Solutiongokul.shreerajNo ratings yet
- Mini Project SrihariDocument14 pagesMini Project SrihariAshik GRNo ratings yet
- Topic #1 - IntroductionDocument23 pagesTopic #1 - IntroductionDavidNo ratings yet
- EmbOS GenericDocument324 pagesEmbOS Genericbogd33No ratings yet
- 715ect04 Embedded Systems Notes - All UnitsDocument241 pages715ect04 Embedded Systems Notes - All UnitssumathiNo ratings yet
- Introduction To Picmicro McuDocument35 pagesIntroduction To Picmicro McuBonay BalotNo ratings yet
- Literature Review of Water Level ControllerDocument5 pagesLiterature Review of Water Level Controllerfvesdf9j100% (1)
- Arduino Based Home Automation Using Android ApplicationDocument5 pagesArduino Based Home Automation Using Android ApplicationMihai BogdanNo ratings yet
- Bus Detection For Blind PeopleDocument6 pagesBus Detection For Blind PeoplefathimaNo ratings yet
- Wireless Data Transmission Cum Data Acquisition Through IOT in Industrial EnvironmentDocument7 pagesWireless Data Transmission Cum Data Acquisition Through IOT in Industrial EnvironmentkhozainuzNo ratings yet
- Introduction To Microcontrollers: Department of EIE / Pondicherry Engineering CollegeDocument12 pagesIntroduction To Microcontrollers: Department of EIE / Pondicherry Engineering Collegeprof_kt100% (1)
- Lab Manual Advanced MicrocontrollerDocument79 pagesLab Manual Advanced MicrocontrollertrippinNo ratings yet
- Water Level Controller and Traffic Light Controler Using 8051Document5 pagesWater Level Controller and Traffic Light Controler Using 8051arunambrose2004No ratings yet
- Contents:-: Temperature Sensor and ControlDocument34 pagesContents:-: Temperature Sensor and ControlTarun Gupta100% (4)
- Presented By: Divya DhawanDocument35 pagesPresented By: Divya DhawanAkash BhardwajNo ratings yet
- RZLLCW - GS REV0.0.2 GroundStudio Jade Nano+ PinoutDocument1 pageRZLLCW - GS REV0.0.2 GroundStudio Jade Nano+ PinoutBIosFileNo ratings yet
- Programming With ArduinoDocument30 pagesProgramming With ArduinoTriều NguyễnNo ratings yet
- Microcontroller Based Dam Gate Control SystemDocument6 pagesMicrocontroller Based Dam Gate Control SystemVishal Subhash patilNo ratings yet
- Using An Application Programming Interface API To Simplify Mil STD 1553 Designs - Whitepaperpdf.renderDocument11 pagesUsing An Application Programming Interface API To Simplify Mil STD 1553 Designs - Whitepaperpdf.rendertejk79No ratings yet
- Atmel 7810 Automotive Microcontrollers ATmega328P - Datasheet PDFDocument294 pagesAtmel 7810 Automotive Microcontrollers ATmega328P - Datasheet PDFnagendra2195No ratings yet
- Mip 2 2008Document94 pagesMip 2 2008majid_ak13833No ratings yet
- Foggy RoadsDocument62 pagesFoggy Roadssudhakar5472No ratings yet
- Automated Bill To Coin Money Exchanger (Philippine Peso)Document13 pagesAutomated Bill To Coin Money Exchanger (Philippine Peso)NicoNo ratings yet
- Project Awd ReportDocument15 pagesProject Awd Reportyoubora2903No ratings yet
- An 10302Document14 pagesAn 10302Kyler GreenwayNo ratings yet