Download as pdf or txt
You might also like
- 14M B9J Electric Schematic - B9J1-1272Document34 pages14M B9J Electric Schematic - B9J1-1272Muhammad IbrahimNo ratings yet
- Aldol Condensation ReactionDocument8 pagesAldol Condensation ReactionMohd Nakirudin Muhamad Nor100% (1)
- ALD Additive Manufacturing VIGA-EIGA Broschure-1 PDFDocument4 pagesALD Additive Manufacturing VIGA-EIGA Broschure-1 PDFVenkateswaran KrishnamurthyNo ratings yet
- 1 OnlineDocument10 pages1 OnlineMangeshNo ratings yet
- Cornering Fatigue Test and Radial Fatigue Test On A Rim With Steps For A Mono-Tyre E-Vehicle Using Finite Element AnalysisDocument8 pagesCornering Fatigue Test and Radial Fatigue Test On A Rim With Steps For A Mono-Tyre E-Vehicle Using Finite Element AnalysisGowtham KumarNo ratings yet
- Design of A Drivetrain For Sae Baja RaciDocument9 pagesDesign of A Drivetrain For Sae Baja Raciragavendra marimuthuNo ratings yet
- 3IJMPERDAPR20193Document18 pages3IJMPERDAPR20193TJPRC PublicationsNo ratings yet
- Analysis of Two Stage Reduction GearboxDocument4 pagesAnalysis of Two Stage Reduction GearboxThein Min HtikeNo ratings yet
- Shell Eco Marathon 2021 Its Team Sapuangin Simulate To InnovateDocument18 pagesShell Eco Marathon 2021 Its Team Sapuangin Simulate To InnovateRudy ArthaNo ratings yet
- 235 TMT11 007 PDFDocument4 pages235 TMT11 007 PDFdeepak_gupta_pritiNo ratings yet
- Aime 12Document3 pagesAime 12Abhishek Y MNo ratings yet
- Preprints202004 0099 v1Document16 pagesPreprints202004 0099 v1Hà Tiến ĐôngNo ratings yet
- 17 003 Joannides - Rtio .Wheel Press FitDocument6 pages17 003 Joannides - Rtio .Wheel Press FitVivekDhameliyaNo ratings yet
- ITS Team Sapuangin - Simulate To InnovateDocument18 pagesITS Team Sapuangin - Simulate To InnovateDian PermanaNo ratings yet
- Tech - Updates 2 - 2018Document14 pagesTech - Updates 2 - 2018sungshinnNo ratings yet
- Sae Technical Paper Series: Kei Nakayama, Seiji Tamaki, Hiroyuki Miki and Masaaki TakiguchiDocument10 pagesSae Technical Paper Series: Kei Nakayama, Seiji Tamaki, Hiroyuki Miki and Masaaki TakiguchiSelvaraji MuthuNo ratings yet
- Ba 32348350Document3 pagesBa 32348350Deepak RainaNo ratings yet
- Fatigue Life Evaluvation of An Automobile Front AxleDocument7 pagesFatigue Life Evaluvation of An Automobile Front AxleKivanc SengozNo ratings yet
- 18 2024jamdsm0015Document20 pages18 2024jamdsm0015Travis WoodrowNo ratings yet
- Hadboul 2021 IOP Conf. Ser. Mater. Sci. Eng. 1105 012022Document11 pagesHadboul 2021 IOP Conf. Ser. Mater. Sci. Eng. 1105 012022Luong Ngoc MinhNo ratings yet
- Design of 3-Phase BLDC Motor For Electric Vehicle Application by Using Finite Element SimulationDocument6 pagesDesign of 3-Phase BLDC Motor For Electric Vehicle Application by Using Finite Element Simulationsatyam swarup dubeyNo ratings yet
- Harvesting - Suspension - JVA FinalDocument8 pagesHarvesting - Suspension - JVA Finaljerf0281No ratings yet
- Design Optimization of Brushless Permanent Magnet Hub Motor Drive Using FEADocument5 pagesDesign Optimization of Brushless Permanent Magnet Hub Motor Drive Using FEASuman SahaNo ratings yet
- Designe GearDocument8 pagesDesigne GearSaveli Paul FlorinNo ratings yet
- Brushless DC Motor Design For Electric Traction SystemDocument5 pagesBrushless DC Motor Design For Electric Traction Systemvishal komakulaNo ratings yet
- Design, Analysis and Weight Optimization of LMV Shaft by Using AL + GF CompositeDocument7 pagesDesign, Analysis and Weight Optimization of LMV Shaft by Using AL + GF CompositeIJRASETPublicationsNo ratings yet
- Design and Development of Inline Two Wheeler Self Balancing Electric Bike IJERTCONV9IS03112Document4 pagesDesign and Development of Inline Two Wheeler Self Balancing Electric Bike IJERTCONV9IS03112Amjad RajagiriNo ratings yet
- Parameter Determination of The BLDC MotorDocument4 pagesParameter Determination of The BLDC MotorHuynh Thanh AnhNo ratings yet
- Effects of Damping Parameters On Damping Force of Two Wheeler Front Suspension IJERTV2IS70190 PDFDocument9 pagesEffects of Damping Parameters On Damping Force of Two Wheeler Front Suspension IJERTV2IS70190 PDFvijayNo ratings yet
- DC Series Motor - Electric MachineDocument9 pagesDC Series Motor - Electric MachineEiz Al.YemaniNo ratings yet
- A Presentation On: "Modelling of Passenger Railway Vehicle With Radial Bogie & Evaluating Performance Parameters"Document21 pagesA Presentation On: "Modelling of Passenger Railway Vehicle With Radial Bogie & Evaluating Performance Parameters"Tushar BulungeNo ratings yet
- Design of UV JointDocument11 pagesDesign of UV JointKapil BhusareNo ratings yet
- Annals 2013 2 19 PDFDocument4 pagesAnnals 2013 2 19 PDFLohith B.YNo ratings yet
- Yang 2007Document11 pagesYang 2007Mehmet KayhanNo ratings yet
- Multiobjective Optimal Design of An Inverter Fed Axial Flux Permanent Magnet In-Wheel Motor For Electric VehiclesDocument23 pagesMultiobjective Optimal Design of An Inverter Fed Axial Flux Permanent Magnet In-Wheel Motor For Electric Vehiclesrasim_m1146No ratings yet
- Regenerative Braking Control Under Sliding Braking Condition of Electric Vehicles With Switched Reluctance Motor Drive SystemDocument13 pagesRegenerative Braking Control Under Sliding Braking Condition of Electric Vehicles With Switched Reluctance Motor Drive SystemBT20MEC120 Jyoti ThakurNo ratings yet
- 13680-Article Text-23920-1-10-20201008Document10 pages13680-Article Text-23920-1-10-20201008MOHAMMED JAWADNo ratings yet
- Analysis of Braking Force Efficiency MeasurementsDocument7 pagesAnalysis of Braking Force Efficiency MeasurementsHsan HaddarNo ratings yet
- Abstract:: Design Report For Baja Saeindia 2018Document10 pagesAbstract:: Design Report For Baja Saeindia 2018AndhdNo ratings yet
- Motor Power Calculations and Controller PDFDocument5 pagesMotor Power Calculations and Controller PDFRrdbjdNo ratings yet
- 40 Makki Rev1Document10 pages40 Makki Rev1Akhil JNo ratings yet
- Articol - Jelgava 2011Document6 pagesArticol - Jelgava 2011Andreea AlinaNo ratings yet
- Design Optimization of Automotive Engine Mount System: July 2020Document7 pagesDesign Optimization of Automotive Engine Mount System: July 2020dandavatevvNo ratings yet
- Gear Geometry For Reduced and Robust Transmission Error and Gearbox NoiseDocument21 pagesGear Geometry For Reduced and Robust Transmission Error and Gearbox Noiseranim najibNo ratings yet
- Design of Fault Tolerant Control System For Electric Vehicles With Steer-by-Wire and In-Wheel MotorsDocument6 pagesDesign of Fault Tolerant Control System For Electric Vehicles With Steer-by-Wire and In-Wheel MotorsLuong Ngoc MinhNo ratings yet
- Sae Sis03 NarDocument6 pagesSae Sis03 Narsuraj dhulannavarNo ratings yet
- Ravikumar 2020 IOP Conf. Ser. Mater. Sci. Eng. 988 012043Document15 pagesRavikumar 2020 IOP Conf. Ser. Mater. Sci. Eng. 988 012043ko koNo ratings yet
- Mechanical Design DocumentDocument13 pagesMechanical Design DocumentJaishikha DawahooNo ratings yet
- Gradeability For Automobiles: Akilesh YamsaniDocument7 pagesGradeability For Automobiles: Akilesh YamsaninrjmanitNo ratings yet
- GeometriDocument9 pagesGeometrireyhanNo ratings yet
- Simulation of An Off-Road Vehicle Roll Cage A Static AnalysisDocument3 pagesSimulation of An Off-Road Vehicle Roll Cage A Static AnalysisAnbu SachinistNo ratings yet
- Wang 2018Document5 pagesWang 2018R Prabhu SekarNo ratings yet
- Experimental Investigation On The Effici PDFDocument5 pagesExperimental Investigation On The Effici PDFswapnil pandeNo ratings yet
- Effect of Pinion Profile Modification On Rack and Pinion Steering GearDocument9 pagesEffect of Pinion Profile Modification On Rack and Pinion Steering GearDhayou GraphyNo ratings yet
- Seismic Fragility Assessment of Highway Bridge: S. Mahmoudi & L. ChouinardDocument8 pagesSeismic Fragility Assessment of Highway Bridge: S. Mahmoudi & L. ChouinardcherifdjNo ratings yet
- Calculation of Dynamic Forces and AnalysDocument6 pagesCalculation of Dynamic Forces and AnalysSARATH RAJ KKVNo ratings yet
- Paper 6Document9 pagesPaper 6Pala PalaNo ratings yet
- Stress Analysis in Wheel Rim by Using Dynamic Cornering Fatigue Test Under Different ConditionsDocument6 pagesStress Analysis in Wheel Rim by Using Dynamic Cornering Fatigue Test Under Different Conditionsesmaeel ghafariNo ratings yet
- Effect of Geometrical Imperfections of Gears in Large Offshore Wind Turbine Gear Trains Case StudiesDocument10 pagesEffect of Geometrical Imperfections of Gears in Large Offshore Wind Turbine Gear Trains Case StudiesFatho JamylNo ratings yet
- Study of Effect of Varying Engine Mount Locations and Stiffness On Vibration in Heavy Commercial Vehicles IJERTV3IS21173Document4 pagesStudy of Effect of Varying Engine Mount Locations and Stiffness On Vibration in Heavy Commercial Vehicles IJERTV3IS21173UdhamNo ratings yet
- 08 GVorotovicDocument6 pages08 GVorotovicMiguel Angel Alvarez BoreaNo ratings yet
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisFrom EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNo ratings yet
- Waymo Safety Report 2017 10 PDFDocument43 pagesWaymo Safety Report 2017 10 PDFWaqas Mehmood BaigNo ratings yet
- Mortar Composition Defined According To Rheometer and Flow Table Tests Using Factorial Designed ExperimentsDocument5 pagesMortar Composition Defined According To Rheometer and Flow Table Tests Using Factorial Designed ExperimentsWaqas Mehmood BaigNo ratings yet
- Chap 8Document38 pagesChap 8Ravi KhandelwalNo ratings yet
- Arif ProjectDocument75 pagesArif ProjectWaqas Mehmood BaigNo ratings yet
- Kuis NPV Vs IRR (CH 5 and 6)Document4 pagesKuis NPV Vs IRR (CH 5 and 6)Imelda HotmariaNo ratings yet
- Accurex, Model XXEW-10.0 Wall-Mounted Canopy Exhaust Hood Performance ReportDocument23 pagesAccurex, Model XXEW-10.0 Wall-Mounted Canopy Exhaust Hood Performance ReportProingmeca CANo ratings yet
- PREFACE of Operating SystemsDocument4 pagesPREFACE of Operating SystemsAMIT RADHA KRISHNA NIGAMNo ratings yet
- An Assessment of HF Nvis Radio System Reliability: Dean SumićDocument10 pagesAn Assessment of HF Nvis Radio System Reliability: Dean Sumićdot16eNo ratings yet
- Seismic Performance of Post-Tensioned Precast ConcDocument9 pagesSeismic Performance of Post-Tensioned Precast ConcAbderrahmane SaidNo ratings yet
- Stat 372 Midterm W14 SolutionDocument4 pagesStat 372 Midterm W14 SolutionAdil AliNo ratings yet
- A Novel Design of Flower Tying Machine: ISSN-2394-5125Document4 pagesA Novel Design of Flower Tying Machine: ISSN-2394-5125aruljeromeNo ratings yet
- Och2016 17 PDFDocument28 pagesOch2016 17 PDFPayal SharmaNo ratings yet
- Chapter 5 Auxiliary View - HandoutDocument25 pagesChapter 5 Auxiliary View - HandoutTeshome Bekele100% (1)
- Nova ZelandiaDocument1 pageNova ZelandiaVinicius BorsatoNo ratings yet
- Mobile Development: Application'S Life CycleDocument32 pagesMobile Development: Application'S Life CycleNgô Tiến ThiệnNo ratings yet
- Page No 9 1-5 To 7-5-2012Document1 pagePage No 9 1-5 To 7-5-2012Gulam Rabbani FidaNo ratings yet
- 1 MC Culloh Pitts Neuron Model 22 Jul 2019material I 22 Jul 2019 Intro NewDocument58 pages1 MC Culloh Pitts Neuron Model 22 Jul 2019material I 22 Jul 2019 Intro NewBarry AllenNo ratings yet
- 132 KV SubstationDocument12 pages132 KV SubstationAnonymous HyOfbJ6No ratings yet
- Aquatic Ecology: Ecological PrinciplesDocument37 pagesAquatic Ecology: Ecological PrinciplesDaniel Alejandro Velasquez GoezNo ratings yet
- Journal of Food Composition and Analysis: Original Research ArticleDocument10 pagesJournal of Food Composition and Analysis: Original Research ArticleLucas B. TheodoroviezNo ratings yet
- Huamei Spec Sheets - 2018Document1 pageHuamei Spec Sheets - 2018Phan LongNo ratings yet
- (Typological Studies in Language 66) Maya Hickmann (Ed.), Stéphane Robert (Ed.) - Space in Languages - Linguistic Systems and Cognitive Categories-John Benjamins Publishing Company (2006)Document375 pages(Typological Studies in Language 66) Maya Hickmann (Ed.), Stéphane Robert (Ed.) - Space in Languages - Linguistic Systems and Cognitive Categories-John Benjamins Publishing Company (2006)Ge Arias100% (1)
- GRDSLABDocument22 pagesGRDSLABCesar Rosas100% (1)
- Communication Signals and System Design: K L UniversityDocument11 pagesCommunication Signals and System Design: K L UniversitykarthikNo ratings yet
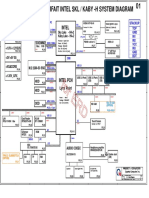
- Power Pavilion Parfait Intel SKL / Kaby - H System DiagramDocument52 pagesPower Pavilion Parfait Intel SKL / Kaby - H System DiagramAbnesis NesisNo ratings yet
- Social Network Analysis Ii: MTP Ismu Rini Dwi Ari Jurusan Perencanaan Wilayah Dan Kota FtubDocument32 pagesSocial Network Analysis Ii: MTP Ismu Rini Dwi Ari Jurusan Perencanaan Wilayah Dan Kota FtubfikrunnisaNo ratings yet
- Structural and Hydrological Design of Permeable PavementsDocument20 pagesStructural and Hydrological Design of Permeable Pavementssach1116No ratings yet
- Abts AssayDocument7 pagesAbts AssayHelen Kristel Turin VillegasNo ratings yet
- (Cambridge IISc Series) A. K. Nandakumaran, P. S. Datti - Partial Differential Equations - Classical Theory With A Modern Touch (Cambridge IISc Series) - Cambridge University Press (2020)Document377 pages(Cambridge IISc Series) A. K. Nandakumaran, P. S. Datti - Partial Differential Equations - Classical Theory With A Modern Touch (Cambridge IISc Series) - Cambridge University Press (2020)Rahul DevarakondaNo ratings yet
- Mathematics 9 Curriculum MapDocument7 pagesMathematics 9 Curriculum MapMohammad Saide LangcoNo ratings yet
- TD 7626 FDocument15 pagesTD 7626 FVanderlei MarcariniNo ratings yet