Download as docx, pdf, or txt
You might also like
- 1.6 Wiki MARCH - 2021Document37 pages1.6 Wiki MARCH - 2021nitinNo ratings yet
- Design and Implementation of AMR System Using Arduino and Digital Energy MeterDocument4 pagesDesign and Implementation of AMR System Using Arduino and Digital Energy MeterEngidNo ratings yet
- JDS2900 Function Generator User ManualDocument17 pagesJDS2900 Function Generator User ManualVivi LazuliNo ratings yet
- Pugh PDFDocument13 pagesPugh PDFRandall Marsh100% (1)
- Paper Counting Machine Project Report.Document40 pagesPaper Counting Machine Project Report.josephfelix100% (2)
- Design of A Real Time Smart Honking SystemDocument6 pagesDesign of A Real Time Smart Honking SystemArka MajumdarNo ratings yet
- Smart Solar Grass Cutter RobotDocument3 pagesSmart Solar Grass Cutter RobotEditor IJTSRDNo ratings yet
- Industrial Training Presentation On Regional Workshop of Upsrtc (Uttar Pradesh State Road Transport Corporation)Document18 pagesIndustrial Training Presentation On Regional Workshop of Upsrtc (Uttar Pradesh State Road Transport Corporation)Preet ChahalNo ratings yet
- Summer Training Report PDFDocument53 pagesSummer Training Report PDFAnjali VermaNo ratings yet
- Speed Control of DC MotorDocument31 pagesSpeed Control of DC Motorabhinav. alpheus651997No ratings yet
- Device Load Monitor With Programmable Meter For Energy AuditDocument3 pagesDevice Load Monitor With Programmable Meter For Energy AuditMandeep G KashyapNo ratings yet
- Automated Pneumatic Sheet Metal Cutting MachineDocument6 pagesAutomated Pneumatic Sheet Metal Cutting MachineRushikesh PatilNo ratings yet
- Smart Room Temperature Controller AtmegaDocument3 pagesSmart Room Temperature Controller AtmegaIsraelPerezSanchez0% (1)
- Electrical Engineering - Engineering - Switchgear and Protection - Induction Type Relay - NotesDocument14 pagesElectrical Engineering - Engineering - Switchgear and Protection - Induction Type Relay - NotesAnilNo ratings yet
- CNC Report Bhel Haridwar Summer Training Report Electronic & CommunicationDocument29 pagesCNC Report Bhel Haridwar Summer Training Report Electronic & Communicationritika_arora19067% (3)
- Design and Fabrication of Single Phase Induction Motor For Numerical Machine ComplexDocument55 pagesDesign and Fabrication of Single Phase Induction Motor For Numerical Machine Complexmugisa aloysiousNo ratings yet
- Grid Connected Induction Generator and Self Excited Induction Generator..Document3 pagesGrid Connected Induction Generator and Self Excited Induction Generator..Sunil JainNo ratings yet
- PDFDocument38 pagesPDFshady boyNo ratings yet
- Torque Ripple Minimization of A Switched Reluctance Motor Using Fuzzy Logic ControlDocument8 pagesTorque Ripple Minimization of A Switched Reluctance Motor Using Fuzzy Logic ControlEditor IJRITCCNo ratings yet
- A Training Seminar ON 135 MW Gas Based Power Plant Utran, SuratDocument20 pagesA Training Seminar ON 135 MW Gas Based Power Plant Utran, SuratGangwal AkashNo ratings yet
- FulltextThesis 2Document209 pagesFulltextThesis 2Kean PagnaNo ratings yet
- Report - Next Generation Smart Substation Through GSM TechnologyDocument70 pagesReport - Next Generation Smart Substation Through GSM TechnologyRamsathayaNo ratings yet
- SOLARDocument15 pagesSOLARShubhangi Shivaji Pawar100% (1)
- Design & Analysis of Camshaft: S.G.Thorat, Nitesh Dubey, Arvind Shinde, Pushkar Fulpagare, Manish SuryavanshiDocument5 pagesDesign & Analysis of Camshaft: S.G.Thorat, Nitesh Dubey, Arvind Shinde, Pushkar Fulpagare, Manish SuryavanshibebiNo ratings yet
- QuantumController EMDocument2 pagesQuantumController EMandresNo ratings yet
- Unconventional Machining Processes C. Devanathan-137-200Document64 pagesUnconventional Machining Processes C. Devanathan-137-200LokitoPaTlpvRomeroHernandezNo ratings yet
- Final ThesisDocument58 pagesFinal ThesisrontojoyNo ratings yet
- Bhel - CNC MachinesDocument60 pagesBhel - CNC MachinesAggyapal Singh JimmyNo ratings yet
- Fabrication of Plant Irrigation Water SprinklerDocument10 pagesFabrication of Plant Irrigation Water SprinklerSanjayNo ratings yet
- DVDF Test SetDocument2 pagesDVDF Test SetHiren VasaniNo ratings yet
- Speed Control of Induction Motor by Using IR11Document16 pagesSpeed Control of Induction Motor by Using IR11Anuj TripathiNo ratings yet
- Electric Vehicle Seminar-1Document4 pagesElectric Vehicle Seminar-1Sandeep RajakNo ratings yet
- Three Phase Fault Analysis With Auto Reset For Temporary Fault and Trip ForDocument16 pagesThree Phase Fault Analysis With Auto Reset For Temporary Fault and Trip ForFirstLearnNo ratings yet
- Elctric Machines and TransformersDocument17 pagesElctric Machines and Transformershrishikesh barveNo ratings yet
- BLDC MotorDocument8 pagesBLDC MotorMahlet MelesseNo ratings yet
- Regenerative Suspension SystemDocument24 pagesRegenerative Suspension Systemvineeth100% (1)
- Electrical Machine Design Unit1-VKDocument8 pagesElectrical Machine Design Unit1-VKSajidh M ShamsudeenNo ratings yet
- Basic Sensor and PrincipleDocument60 pagesBasic Sensor and Principleyeshwanth reddy RachumallaNo ratings yet
- What Is An Inverter?: Classification of InvertersDocument11 pagesWhat Is An Inverter?: Classification of Invertersayash mohantyNo ratings yet
- Adaptive Piezoelectric Energy Harvesting CircuitDocument29 pagesAdaptive Piezoelectric Energy Harvesting Circuitgangad_1No ratings yet
- Industry-4-0 GTU Study Material E-Notes Unit-4 25042021123702PMDocument14 pagesIndustry-4-0 GTU Study Material E-Notes Unit-4 25042021123702PMparth bhardwajNo ratings yet
- Simulation Analysis of Inrush Current of Three Phase Transformer Based On MATLABDocument3 pagesSimulation Analysis of Inrush Current of Three Phase Transformer Based On MATLABDon NepalNo ratings yet
- Basic Electrical Engineering: by Dr. G. RameshDocument97 pagesBasic Electrical Engineering: by Dr. G. Rameshnaman jaiswalNo ratings yet
- To Understand Basic Concepts of Electromagnetic Circuits As They Relate To Voltages, Currents, and PH Ys Ical Forces Induced in ConductorsDocument5 pagesTo Understand Basic Concepts of Electromagnetic Circuits As They Relate To Voltages, Currents, and PH Ys Ical Forces Induced in ConductorsHanan ShayiboNo ratings yet
- IOT Based Deliberate Load Shedding Management System: Project Report OnDocument34 pagesIOT Based Deliberate Load Shedding Management System: Project Report OnAdhiraj KakatiNo ratings yet
- Gopal Gupta 2K20PES09-1Document18 pagesGopal Gupta 2K20PES09-1Kritu Gupta100% (1)
- 17ee82 - Ida - Mod 4 NotesDocument18 pages17ee82 - Ida - Mod 4 NotesManish Kumar SahaniNo ratings yet
- Classroom Automation by Using Arduino, Prof. Dr. v. G. Neve, Gopal G. Hatwar, Harshwardhan B. Chavhan, Pragati S. ChapariyaDocument5 pagesClassroom Automation by Using Arduino, Prof. Dr. v. G. Neve, Gopal G. Hatwar, Harshwardhan B. Chavhan, Pragati S. Chapariyamukesh poundekarNo ratings yet
- Four Quadrant DC Motor Control Without MicrocontrollerDocument2 pagesFour Quadrant DC Motor Control Without Microcontrollerjayonline_4uNo ratings yet
- Frog Leg WindingDocument9 pagesFrog Leg WindingAbhijeet RedekarNo ratings yet
- Intelligent Braking System Literature ReviewDocument39 pagesIntelligent Braking System Literature ReviewRaj WagdariNo ratings yet
- DC Motor Speed Control Using PWMDocument14 pagesDC Motor Speed Control Using PWMVincent KorieNo ratings yet
- 3 Phase Cascaded H-Bridge InverterDocument7 pages3 Phase Cascaded H-Bridge InverterAnil ShahNo ratings yet
- Aircraft Hybrid Electric Aircraft MotorsDocument5 pagesAircraft Hybrid Electric Aircraft MotorsAdis Har-yo CahyonoNo ratings yet
- Lic Eec-501 Notes Unit5 Iftm UniversityDocument14 pagesLic Eec-501 Notes Unit5 Iftm UniversitySougata GhoshNo ratings yet
- Design and Modelling of Internal Permanent Magnet Motor (#764846) - 1189475Document25 pagesDesign and Modelling of Internal Permanent Magnet Motor (#764846) - 1189475Tejas PanchalNo ratings yet
- Seminar Report On WitricityDocument24 pagesSeminar Report On WitricityAliraza76No ratings yet
- Simulation Modeling of Inverter Controlled BLDC Drive Using Four SwitchDocument18 pagesSimulation Modeling of Inverter Controlled BLDC Drive Using Four SwitchCHEIF EDITORNo ratings yet
- Super-High Frequency Models and Behaviour PDFDocument23 pagesSuper-High Frequency Models and Behaviour PDFalokinxxNo ratings yet
- Electromechanical Energy ConversionDocument16 pagesElectromechanical Energy ConversionJayvie TumangNo ratings yet
- D.C Machines: 1-IntroductionDocument17 pagesD.C Machines: 1-IntroductionBarhav SarbastNo ratings yet
- Brushless DC Electric MotorDocument8 pagesBrushless DC Electric MotorAngel VelasquezNo ratings yet
- Type of Earthing SystemDocument6 pagesType of Earthing SystemMokr AchourNo ratings yet
- Procomm Wideband DisconeDocument2 pagesProcomm Wideband DisconeBenjamin DoverNo ratings yet
- E104 - Superposition Theorem and LinearityDocument19 pagesE104 - Superposition Theorem and LinearityRick AlvientoNo ratings yet
- AX5214H 48 Bits DIO Board User's ManualDocument52 pagesAX5214H 48 Bits DIO Board User's ManualDaniel Ortiz100% (1)
- Equipment Layout Option 1: GE HealthcareDocument2 pagesEquipment Layout Option 1: GE HealthcareAdit IrmaNo ratings yet
- B3LT1018Document1 pageB3LT1018ErnaNo ratings yet
- Maximum Power Point Tracking (MPPT) Controlling AlgorithmsDocument12 pagesMaximum Power Point Tracking (MPPT) Controlling Algorithmsrubon khanNo ratings yet
- High Voltage Qualified: Out L I N EDocument1 pageHigh Voltage Qualified: Out L I N EtelecttNo ratings yet
- Power Monitor 3000Document66 pagesPower Monitor 3000Zuñiga AntonioNo ratings yet
- Excitation SystemDocument6 pagesExcitation Systemsanjay sharmaNo ratings yet
- Circulating Current and ZVS On of A Dual Active Bridge DC DC Converter A ReviewDocument12 pagesCirculating Current and ZVS On of A Dual Active Bridge DC DC Converter A ReviewAn TranNo ratings yet
- NEM Declaration Form (TNB Contract)Document2 pagesNEM Declaration Form (TNB Contract)Kian Keong Yee100% (1)
- SeminarDocument30 pagesSeminarDevender ChahalNo ratings yet
- Intermittent Current Rating:: - InterruptedDocument1 pageIntermittent Current Rating:: - InterruptedLuis GammellaNo ratings yet
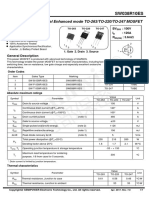
- N-Channel Enhanced Mode TO-263/TO-220/TO-247 MOSFET: SW038R10ESDocument7 pagesN-Channel Enhanced Mode TO-263/TO-220/TO-247 MOSFET: SW038R10ESPanagos PanagiotisNo ratings yet
- Setting and Analyzing The Operating Point of Temperature Controlled System ApparatusDocument2 pagesSetting and Analyzing The Operating Point of Temperature Controlled System ApparatuskalimullahNo ratings yet
- Physics Important Derivations QuestionDocument3 pagesPhysics Important Derivations QuestionsumitNo ratings yet
- Ae - Lab 6Document6 pagesAe - Lab 6Usman KhalilNo ratings yet
- DTK ps10132 enDocument4 pagesDTK ps10132 enOmar JarwanNo ratings yet
- Bicycle Powered GeneratorDocument4 pagesBicycle Powered GeneratorPeter JohnsonNo ratings yet
- Pdx8X Single and Dual Channel Din Rail Parking Detector User ManualDocument10 pagesPdx8X Single and Dual Channel Din Rail Parking Detector User ManualJose MorenoNo ratings yet
- 2 - Rencana IBI Dalam Pengembangan Ekosistem Baterai PT Industri Baterai IndonesiaDocument13 pages2 - Rencana IBI Dalam Pengembangan Ekosistem Baterai PT Industri Baterai IndonesiaSovi mailadiniya100% (1)
- SVM199Document145 pagesSVM199tesaurusNo ratings yet
- IF3601 DatasheetDocument1 pageIF3601 DatasheetAndrew SunderlandNo ratings yet
- ItangoDocument45 pagesItangoAhmad Fajar HumaidiNo ratings yet
- Bias Tee Manual - 11612-90001Document16 pagesBias Tee Manual - 11612-90001dataholderNo ratings yet
- ATADU2002 DatasheetDocument3 pagesATADU2002 DatasheethindNo ratings yet