Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- D1.1-2010 Practice Exam AWS 2008 Validated To 2010 by KJDocument11 pagesD1.1-2010 Practice Exam AWS 2008 Validated To 2010 by KJArroyo H Woos100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Ga 216 07 PDFDocument24 pagesGa 216 07 PDFabudabeejajaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Bolting Technology Catalogue Echnology CatalogueDocument56 pagesBolting Technology Catalogue Echnology CatalogueHarold AnilloNo ratings yet
- Journal of Computational Physics: C.-H. Park, N. Böttcher, W. Wang, O. KolditzDocument9 pagesJournal of Computational Physics: C.-H. Park, N. Böttcher, W. Wang, O. KolditzAna Carolina LoyolaNo ratings yet
- Modeling of Unsaturated Water Ow in Double-Porosity Soils by The Homogenization ApproachDocument14 pagesModeling of Unsaturated Water Ow in Double-Porosity Soils by The Homogenization ApproachAna Carolina LoyolaNo ratings yet
- A Study of Upstream-Weighted High-Order Differencing For Approximation To Flow ConvectionDocument33 pagesA Study of Upstream-Weighted High-Order Differencing For Approximation To Flow ConvectionAna Carolina LoyolaNo ratings yet
- Edwards 2005Document11 pagesEdwards 2005Ana Carolina LoyolaNo ratings yet
- Papadakis 1995Document17 pagesPapadakis 1995Ana Carolina LoyolaNo ratings yet
- C Havent 1984Document26 pagesC Havent 1984Ana Carolina LoyolaNo ratings yet
- Compositional Modeling of Three Phase Flow With Gravity Using Higher Order Finite Element MethodsDocument26 pagesCompositional Modeling of Three Phase Flow With Gravity Using Higher Order Finite Element MethodsAna Carolina LoyolaNo ratings yet
- DC System Technical Data SheetDocument4 pagesDC System Technical Data SheetArnold Steven0% (1)
- IT Fundamentals Prelim ExamDocument3 pagesIT Fundamentals Prelim ExamBenjie Auza BereNo ratings yet
- Manual Relevador DigitripDocument84 pagesManual Relevador DigitripJulian Canseco zarateNo ratings yet
- Engineering Metrology and Measurements N.V. Raghavendra L. KrishnamurthyDocument26 pagesEngineering Metrology and Measurements N.V. Raghavendra L. KrishnamurthyRandøm TalkìêsNo ratings yet
- Manual Reloj PyleDocument69 pagesManual Reloj PyleBanfieldSMNo ratings yet
- Elgi Vayu Series CatalougeDocument2 pagesElgi Vayu Series CatalougeKajal MathurNo ratings yet
- Mathcad - 1000 KL Tank1Document23 pagesMathcad - 1000 KL Tank1Zulfikar N JoelNo ratings yet
- Bronze Data SheetDocument3 pagesBronze Data SheetAnonymous xkKyD8fBouNo ratings yet
- SEMINARDocument22 pagesSEMINARSajalNo ratings yet
- Physics BrochureDocument6 pagesPhysics BrochureZayd Iskandar Dzolkarnain Al-HadramiNo ratings yet
- 123Document40 pages123Blue PntNo ratings yet
- About TVS Logistics PVTDocument4 pagesAbout TVS Logistics PVTSaif Ul IslamNo ratings yet
- Reaction Rate and Activation Energy of The Acidolysis of Ethyl AcetateDocument6 pagesReaction Rate and Activation Energy of The Acidolysis of Ethyl AcetateGlënn Märk PrësörësNo ratings yet
- How To Access A Windows Shared Printer From Ubuntu PDFDocument12 pagesHow To Access A Windows Shared Printer From Ubuntu PDFPramod ThakurNo ratings yet
- 77 Two Stage Uasb Treatment of Industrial Wastewater With Internal CirculationDocument10 pages77 Two Stage Uasb Treatment of Industrial Wastewater With Internal CirculationngocdungmtNo ratings yet
- Manual Curtis 1222 OS15 2013-02-05Document124 pagesManual Curtis 1222 OS15 2013-02-05Iker BasqueAdventureNo ratings yet
- Truss Problem 6.1 Johnston and Beer Book-Static 1-1Document15 pagesTruss Problem 6.1 Johnston and Beer Book-Static 1-1mahfuzul_haqueNo ratings yet
- Solution8 9Document7 pagesSolution8 9Mai PhượngNo ratings yet
- 18-KEC B TECH 2ND SEM JUNE-2011 Updated 2Document159 pages18-KEC B TECH 2ND SEM JUNE-2011 Updated 2Tarun BishtNo ratings yet
- Technical Specification:: A3-SIZE 121023Document4 pagesTechnical Specification:: A3-SIZE 121023MIHAINo ratings yet
- Build PropDocument8 pagesBuild PropYour FreedomNo ratings yet
- Adaptive Pre-Task Assignment Scheduling Strategy For Heterogeneous Distributed Raytracing SystemDocument7 pagesAdaptive Pre-Task Assignment Scheduling Strategy For Heterogeneous Distributed Raytracing SystemPhulturoo KhanNo ratings yet
- Lemg PDFDocument80 pagesLemg PDFMiguel Angel MartinNo ratings yet
- Online Reservation SystemDocument12 pagesOnline Reservation SystemBaloy N. Da Haus20% (5)
- Cooling System Cat C-15 & C-18Document5 pagesCooling System Cat C-15 & C-18Harzanyi MaldonadoNo ratings yet
- Philips BDP 9100 12 Blu Ray Disc Player SMDocument55 pagesPhilips BDP 9100 12 Blu Ray Disc Player SMRoger Martínez BermúdezNo ratings yet
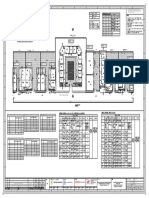
- Building NumberingDocument1 pageBuilding Numberingsamwail siddiquiNo ratings yet