Download as pdf or txt
You might also like
- Kawasaki Controller E Series External I-O Manual PDFDocument84 pagesKawasaki Controller E Series External I-O Manual PDFXanti Zabala Da RosaNo ratings yet
- Kawasaki Controller E Series External I-O Manual PDFDocument84 pagesKawasaki Controller E Series External I-O Manual PDFXanti Zabala Da RosaNo ratings yet
- Operating Instructions - KL4000 V10 enDocument231 pagesOperating Instructions - KL4000 V10 enXanti Zabala Da RosaNo ratings yet
- Mostafa Al Badawi Man and The Universe An Islamic Perspective 2018Document151 pagesMostafa Al Badawi Man and The Universe An Islamic Perspective 2018KhanNo ratings yet
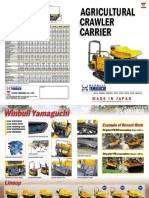
- Carrier Carrier Carrier Crawler Carrier CarrierDocument2 pagesCarrier Carrier Carrier Crawler Carrier CarrierBaggerkingNo ratings yet
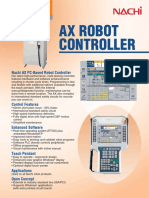
- AX Robot ControllerDocument2 pagesAX Robot ControllerXanti Zabala Da Rosa100% (1)
- SV Maintenance V1.2 CONE VALEDocument64 pagesSV Maintenance V1.2 CONE VALEVictor Alberto Ramos BarronNo ratings yet
- Robot Project Report RoboticsDocument34 pagesRobot Project Report Roboticsdcrust_amit82% (11)
- ES12 BrochureDocument2 pagesES12 BrochureXanti Zabala Da RosaNo ratings yet
- Manual Basic MZ04Document2 pagesManual Basic MZ04Pedro Javier Pingo TalledoNo ratings yet
- ARC Mate 100+C: Intelligent Arc Welding RobotDocument2 pagesARC Mate 100+C: Intelligent Arc Welding Robotnemuriciu232No ratings yet
- M16iB FootprintDocument2 pagesM16iB Footprintto0984903132No ratings yet
- M-16 Series: Basic DescriptionDocument2 pagesM-16 Series: Basic DescriptiondavidNo ratings yet
- RM 10iAN (E) 02aDocument2 pagesRM 10iAN (E) 02apc100xohmNo ratings yet
- Yk 400 XGDocument2 pagesYk 400 XGjet.heNo ratings yet
- Datasheet R 2000ic 165FDocument1 pageDatasheet R 2000ic 165FSalvador BarrónNo ratings yet
- FANUC-M-10iA Series - 13Document2 pagesFANUC-M-10iA Series - 13Nadir ChalinNo ratings yet
- Motoman AR1440: Arc Welding With The AR-seriesDocument2 pagesMotoman AR1440: Arc Welding With The AR-seriesMayank JainNo ratings yet
- R7701e 3Document2 pagesR7701e 3Đinh LinhNo ratings yet
- Rscara (E) 08Document4 pagesRscara (E) 08pc100xohmNo ratings yet
- EZ03 BrochureDocument2 pagesEZ03 BrochureXanti Zabala Da RosaNo ratings yet
- YK1200X 400 RCX340-4: Standard Type: Large TypeDocument1 pageYK1200X 400 RCX340-4: Standard Type: Large TypeJuan David Valderrama ArtunduagaNo ratings yet
- LMPP Cobotracks Slider 3Document16 pagesLMPP Cobotracks Slider 3Yang John (Rich-Tech1688)No ratings yet
- R7801e 5Document2 pagesR7801e 5ArifNo ratings yet
- R-2000iC-125L HOJA DATOS PDFDocument1 pageR-2000iC-125L HOJA DATOS PDFgatolefuNo ratings yet
- RAV Mercedes RAV8055.2.54MB 01 PDFDocument2 pagesRAV Mercedes RAV8055.2.54MB 01 PDFGabriel LaureanoNo ratings yet
- RAV Mercedes RAV8055.2.54MB 01Document2 pagesRAV Mercedes RAV8055.2.54MB 01Gabriel LaureanoNo ratings yet
- Jungheinrich I Efg 213 320 Spec EnglishDocument8 pagesJungheinrich I Efg 213 320 Spec EnglishNEBOJSANo ratings yet
- M 20ia SeriesDocument2 pagesM 20ia SeriesDenilson MarinhoNo ratings yet
- AT Series Gear Box BroctureDocument2 pagesAT Series Gear Box BroctureabhinitindiaNo ratings yet
- Flyer Robot AR1440 E 09.2020Document2 pagesFlyer Robot AR1440 E 09.2020Elmer MuruaNo ratings yet
- Dimensiones de Uso MH12-A00Document2 pagesDimensiones de Uso MH12-A00dramonricardezNo ratings yet
- M 10ia SeriesDocument2 pagesM 10ia Seriessenior_cor73zNo ratings yet
- Slim and Lightweight: Extremely FlexibleDocument2 pagesSlim and Lightweight: Extremely FlexibleJose Rosas SandovalNo ratings yet
- RCR35iB (E) 04Document2 pagesRCR35iB (E) 04pc100xohmNo ratings yet
- RM 800ia (E) 01bDocument2 pagesRM 800ia (E) 01bpc100xohmNo ratings yet
- CD 2 Manuals Espanol NCM S7 para PROFIBUSDocument2 pagesCD 2 Manuals Espanol NCM S7 para PROFIBUSDiego Alejandro Gallardo IbarraNo ratings yet
- SBPN For Drying Cylinders - 5511 - ENDocument4 pagesSBPN For Drying Cylinders - 5511 - ENcmaradiagaNo ratings yet
- Fanuc R-2000iB-250FDocument1 pageFanuc R-2000iB-250Fljubisha.nikolovskiNo ratings yet
- ARC Mate 120i 120il FootprintDocument2 pagesARC Mate 120i 120il Footprintto0984903132No ratings yet
- Ball-Screws SFE-2Document20 pagesBall-Screws SFE-2Joss JossNo ratings yet
- MountingInstructionDocument2 pagesMountingInstructionClaNo ratings yet
- Caracter Is TicsDocument8 pagesCaracter Is TicsFausto Abril MartinezNo ratings yet
- WSG-MF: Gearless Synchronous Lift MachineDocument2 pagesWSG-MF: Gearless Synchronous Lift MachineCristianNo ratings yet
- AM120Document2 pagesAM120Anonymous S8SGcPucNo ratings yet
- FANUC ROBOT - ARC Mate 100ic 120icDocument2 pagesFANUC ROBOT - ARC Mate 100ic 120icR Dinansyah PrawirasapoetraNo ratings yet
- M 800ia60 Flyer en PDFDocument2 pagesM 800ia60 Flyer en PDFjean.malvautNo ratings yet
- I107e r88m-g G-Series Servo Motors Datasheet enDocument10 pagesI107e r88m-g G-Series Servo Motors Datasheet ennguyenquocNo ratings yet
- Si enDocument5 pagesSi enkretziNo ratings yet
- EPX1250Document2 pagesEPX1250adventius S.SNo ratings yet
- PJ Poliuretán Hosszbordás SzíjDocument1 pagePJ Poliuretán Hosszbordás SzíjdcplusszNo ratings yet
- Adobe Scan 18 Jul 2021Document24 pagesAdobe Scan 18 Jul 2021Ismuliono INo ratings yet
- ARC Mate 100+D ARC Mate 120+D: Intelligent Arc Welding RobotDocument2 pagesARC Mate 100+D ARC Mate 120+D: Intelligent Arc Welding RobotJose RomeroNo ratings yet
- Datasheet LRMate-200iDDocument1 pageDatasheet LRMate-200iDROBERTO CAMARGONo ratings yet
- MGM Remote Mount CylindersDocument6 pagesMGM Remote Mount CylindersNima YeganehNo ratings yet
- Design of Machinery - 5Th Ed. Solution Manual 3-74-1Document4 pagesDesign of Machinery - 5Th Ed. Solution Manual 3-74-1David SánchezNo ratings yet
- R-2000iA EW FootprintDocument2 pagesR-2000iA EW Footprintto0984903132No ratings yet
- Topcon Brochure ALE-5100 Series en PDFDocument4 pagesTopcon Brochure ALE-5100 Series en PDFAndrii Horban100% (1)
- Yk 350 XGDocument2 pagesYk 350 XGjet.heNo ratings yet
- High-Speed, Thru-Arm Design: Key BenefitsDocument2 pagesHigh-Speed, Thru-Arm Design: Key BenefitsAdam PrasetyaNo ratings yet
- Pof115 BrochureDocument2 pagesPof115 BrochureJean Luc De MarcNo ratings yet
- R-2000iA SpecDocument2 pagesR-2000iA Specvnthong.sdh21No ratings yet
- Antenna Aj4e3 PDFDocument2 pagesAntenna Aj4e3 PDFArhimandritul Siluan Serghei TelechiNo ratings yet
- Reggisella Levo PDFDocument8 pagesReggisella Levo PDFAnonymous nwsd6DLpbNo ratings yet
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- Release Notes RobotStudio 2019-5 PDFDocument44 pagesRelease Notes RobotStudio 2019-5 PDFXanti Zabala Da RosaNo ratings yet
- RobotStudio Operation Manual PDFDocument298 pagesRobotStudio Operation Manual PDFEmanuelNo ratings yet
- RobotWare 6 DatasheetDocument4 pagesRobotWare 6 DatasheetXanti Zabala Da RosaNo ratings yet
- Program Editor User ManualDocument14 pagesProgram Editor User ManualXanti Zabala Da RosaNo ratings yet
- Nachi Robot Catalog 2012Document20 pagesNachi Robot Catalog 2012Xanti Zabala Da RosaNo ratings yet
- Cleanroom CR7 E 06.2015Document2 pagesCleanroom CR7 E 06.2015Xanti Zabala Da RosaNo ratings yet
- Ssraen 071 006 - Sra H 01 FD11Document30 pagesSsraen 071 006 - Sra H 01 FD11Eddy AlmeidaNo ratings yet
- SRA100H-SRA133HL Rev2 BrochureDocument2 pagesSRA100H-SRA133HL Rev2 BrochureXanti Zabala Da RosaNo ratings yet
- SRA166 210 01A BrochureDocument2 pagesSRA166 210 01A BrochureXanti Zabala Da RosaNo ratings yet
- EZ03-02 Standard SpecificationsDocument28 pagesEZ03-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- SC700 Standard SpecificationsDocument15 pagesSC700 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- NV06L 02 FD11 Standard SpecificationsDocument22 pagesNV06L 02 FD11 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- SC400L-SC500 Standard SpecificationsDocument26 pagesSC400L-SC500 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- MZ04 Standard SpecificationsDocument29 pagesMZ04 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- NV06 02 FD11 Standard SpecificationsDocument22 pagesNV06 02 FD11 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- NB04L 02 FD11 Standard SpecificationsDocument22 pagesNB04L 02 FD11 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- MC600 BrochureDocument2 pagesMC600 BrochureXanti Zabala Da RosaNo ratings yet
- MZ07-02 Standard SpecificationsDocument18 pagesMZ07-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- MC400L BrochureDocument2 pagesMC400L BrochureXanti Zabala Da RosaNo ratings yet
- MWR-SH11UN Installation+Manual DB68-08199A-01 ENGLISH 11092020Document20 pagesMWR-SH11UN Installation+Manual DB68-08199A-01 ENGLISH 11092020Jahir UddinNo ratings yet
- Engines 2L41C 3L41C 4L41C EngDocument6 pagesEngines 2L41C 3L41C 4L41C EngKenan TiroNo ratings yet
- Sesiones de Technical EnglishDocument90 pagesSesiones de Technical EnglishBill Klinthon Chiara100% (1)
- 13 Chakra SystemDocument8 pages13 Chakra Systemliaya76100% (1)
- Signals and Systems DE-40 EE - Semester 4 Spring 2020: Lab Report # 06Document21 pagesSignals and Systems DE-40 EE - Semester 4 Spring 2020: Lab Report # 06Muhammad YousafNo ratings yet
- Datasheet DiacDocument4 pagesDatasheet DiacOrlandoTobonNo ratings yet
- Dell Service ManualDocument220 pagesDell Service ManualYeik ThaNo ratings yet
- Chapter 1 - Intro. To ForestryDocument40 pagesChapter 1 - Intro. To ForestryAngelica Sagayo DocayagNo ratings yet
- F1140 PDFDocument5 pagesF1140 PDFรอคนบนฟ้า ส่งใครมาให้ สักคน100% (1)
- ROLEDocument3 pagesROLESheryl BernabeNo ratings yet
- Dialysis: Prepared byDocument31 pagesDialysis: Prepared byVimal PatelNo ratings yet
- Triber Accessories - BrochureDocument10 pagesTriber Accessories - Brochurecrm testNo ratings yet
- 04 - Rotational Motion - JEE PDFDocument124 pages04 - Rotational Motion - JEE PDFCefas Almeida50% (2)
- GEO L9 Physiography India Part 1Document72 pagesGEO L9 Physiography India Part 1Sambasivarao PerumallaNo ratings yet
- Haloalkanes and Haloarenes Question Bank 1690183665Document26 pagesHaloalkanes and Haloarenes Question Bank 1690183665Pratibaa LNo ratings yet
- ATR LM ClassDocument30 pagesATR LM ClassKezia Sormin100% (1)
- Posture ClassDocument56 pagesPosture Classnarainder kumarNo ratings yet
- Little House in The Big WoodsDocument14 pagesLittle House in The Big Woodsgaragebandtutorials2021No ratings yet
- EE Syllabus PDFDocument100 pagesEE Syllabus PDFShahid LoneNo ratings yet
- Lab1 - ArrayDocument6 pagesLab1 - Arrayezz AymanNo ratings yet
- 50 Milisimal PotencyDocument8 pages50 Milisimal PotencyDr. Surendra Singh100% (3)
- AdulterantsDocument7 pagesAdulterantsNeeraj SharmaNo ratings yet
- MSI K9A2 CF Series ManualDocument89 pagesMSI K9A2 CF Series ManualDosije218No ratings yet
- Released FOR Manufacturing: 2509 ANTAMINA PERU SMC 100/14400 Truck Bridge Assembly Truck Bridge Steel Structure - RightDocument1 pageReleased FOR Manufacturing: 2509 ANTAMINA PERU SMC 100/14400 Truck Bridge Assembly Truck Bridge Steel Structure - RightCarlos ParedesNo ratings yet
- Soal USP BIG LMDocument56 pagesSoal USP BIG LMMoh. Aska FailandriNo ratings yet
- Control Charts: Observations in Each Sub-Group (In CM) Subgroup SDocument2 pagesControl Charts: Observations in Each Sub-Group (In CM) Subgroup SPrajaktaNo ratings yet
- GPX SBRO 004 E Rev.0.1Document4 pagesGPX SBRO 004 E Rev.0.1OperacionesNo ratings yet