Download as pdf or txt
You might also like
- Kawasaki Controller E Series External I-O Manual PDFDocument84 pagesKawasaki Controller E Series External I-O Manual PDFXanti Zabala Da RosaNo ratings yet
- Kawasaki Controller E Series External I-O Manual PDFDocument84 pagesKawasaki Controller E Series External I-O Manual PDFXanti Zabala Da RosaNo ratings yet
- Operating Instructions - KL4000 V10 enDocument231 pagesOperating Instructions - KL4000 V10 enXanti Zabala Da RosaNo ratings yet
- Shibaura Machine S NEW Model SCARA Robot THE400Document2 pagesShibaura Machine S NEW Model SCARA Robot THE400123qweNo ratings yet
- Easy-to-Teach and Easy-to-Operate Arc Welding Robot-Satisfies User's Needs For Saving Space and High ProductivityDocument2 pagesEasy-to-Teach and Easy-to-Operate Arc Welding Robot-Satisfies User's Needs For Saving Space and High Productivityanh thoNo ratings yet
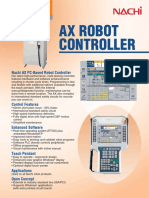
- AX Robot ControllerDocument2 pagesAX Robot ControllerXanti Zabala Da Rosa100% (1)
- Medical Gas Piping SpecDocument22 pagesMedical Gas Piping Specvvg100% (1)
- 01 - Horizontal LifelineDocument170 pages01 - Horizontal LifelineAlex VianaNo ratings yet
- SRA166 210 01A BrochureDocument2 pagesSRA166 210 01A BrochureXanti Zabala Da RosaNo ratings yet
- RM 800ia (E) 01bDocument2 pagesRM 800ia (E) 01bpc100xohmNo ratings yet
- MZ07F MZ07LF 1Document2 pagesMZ07F MZ07LF 1Loi DoanNo ratings yet
- Scara Robot: High Speed HandlingDocument2 pagesScara Robot: High Speed HandlingXanti Zabala Da RosaNo ratings yet
- ARC Mate 100+D ARC Mate 120+D: Intelligent Arc Welding RobotDocument2 pagesARC Mate 100+D ARC Mate 120+D: Intelligent Arc Welding RobotJose RomeroNo ratings yet
- MELFA RH-3CH SCARA Robot Brochure PDFDocument2 pagesMELFA RH-3CH SCARA Robot Brochure PDFVirendra ZopeNo ratings yet
- VM 6083 - 60B1 Data SheetDocument3 pagesVM 6083 - 60B1 Data SheetMinh HoàngNo ratings yet
- AM120Document2 pagesAM120Anonymous S8SGcPucNo ratings yet
- Electric LER enDocument38 pagesElectric LER enSakkelleNo ratings yet
- MC600 BrochureDocument2 pagesMC600 BrochureXanti Zabala Da RosaNo ratings yet
- ARC Mate 100+C: Intelligent Arc Welding RobotDocument2 pagesARC Mate 100+C: Intelligent Arc Welding Robotnemuriciu232No ratings yet
- MZ07-02 Standard SpecificationsDocument18 pagesMZ07-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- ARC Mate 100 Robot Working RangeDocument1 pageARC Mate 100 Robot Working RangeTamii LópezNo ratings yet
- MC400L BrochureDocument2 pagesMC400L BrochureXanti Zabala Da RosaNo ratings yet
- R-2000iC-125L HOJA DATOS PDFDocument1 pageR-2000iC-125L HOJA DATOS PDFgatolefuNo ratings yet
- Datasheet ArcMate 120ic 12LDocument1 pageDatasheet ArcMate 120ic 12LmuertesalvajeNo ratings yet
- VS-6556 and VS 6577 Technical Data SheetDocument3 pagesVS-6556 and VS 6577 Technical Data SheetKien Nguyen TrungNo ratings yet
- SRA100H-SRA133HL Rev2 BrochureDocument2 pagesSRA100H-SRA133HL Rev2 BrochureXanti Zabala Da RosaNo ratings yet
- ArcMate0iB Controller30ibDocument1 pageArcMate0iB Controller30ibrguzmanabundisNo ratings yet
- FANUC ROBOT - ARC Mate 100ic 120icDocument2 pagesFANUC ROBOT - ARC Mate 100ic 120icR Dinansyah PrawirasapoetraNo ratings yet
- MZ04 Standard SpecificationsDocument29 pagesMZ04 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Ssraen 071 006 - Sra H 01 FD11Document30 pagesSsraen 071 006 - Sra H 01 FD11Eddy AlmeidaNo ratings yet
- HA006Document4 pagesHA006Berkay GültekinNo ratings yet
- Ha006 Hi5Document3 pagesHa006 Hi5Berkay GültekinNo ratings yet
- SC700 Standard SpecificationsDocument15 pagesSC700 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- Fanuc TF - CR-35 - enDocument2 pagesFanuc TF - CR-35 - enpacamu05No ratings yet
- Dyadic Mechatronics Cylinder CatalogDocument16 pagesDyadic Mechatronics Cylinder CatalogJuan Francisco Sanchez MassadiNo ratings yet
- Nachi mz07 SpecificationDocument26 pagesNachi mz07 Specificationkhophimhd100% (1)
- Outstanding Path Accuracy: Maximum Precision andDocument2 pagesOutstanding Path Accuracy: Maximum Precision andJorge GodielNo ratings yet
- Permanent Magnet Gearless Machines For ElevatorsDocument6 pagesPermanent Magnet Gearless Machines For ElevatorsKs BharathiyarNo ratings yet
- R7701e 3Document2 pagesR7701e 3Đinh LinhNo ratings yet
- Hyperion Atlas Programmable Digital Servos - Ds16, Ds20, Ds20X Series SpecificationsDocument1 pageHyperion Atlas Programmable Digital Servos - Ds16, Ds20, Ds20X Series Specificationsmohamed sidkyNo ratings yet
- Dyadic Systems CatalogDocument14 pagesDyadic Systems CatalogJuan Francisco Sanchez MassadiNo ratings yet
- Datasheet PaintMate 200ia 5LDocument1 pageDatasheet PaintMate 200ia 5LRafa LozanoNo ratings yet
- FANUC-M-10iA Series - 13Document2 pagesFANUC-M-10iA Series - 13Nadir ChalinNo ratings yet
- A04b 0104 b181 Fanuc Axis Rotary TableDocument2 pagesA04b 0104 b181 Fanuc Axis Rotary Tableclogic26No ratings yet
- 500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsDocument2 pages500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsXanti Zabala Da RosaNo ratings yet
- DENSO Robotics Datasheet Vs 068-087 SeriesDocument2 pagesDENSO Robotics Datasheet Vs 068-087 SeriesAdamNo ratings yet
- Magmotor s28Document2 pagesMagmotor s28Chuck SykesNo ratings yet
- M 800ia60 Flyer en PDFDocument2 pagesM 800ia60 Flyer en PDFjean.malvautNo ratings yet
- Delta (E) 01Document6 pagesDelta (E) 01pc100xohmNo ratings yet
- Smzen 114 003 - MZ01 01 CFDDocument20 pagesSmzen 114 003 - MZ01 01 CFDmfsNo ratings yet
- EZ03-02 Standard SpecificationsDocument28 pagesEZ03-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- DENSO Robotics Datasheet HM-G SeriesDocument2 pagesDENSO Robotics Datasheet HM-G SeriesMarius Constantin100% (1)
- Heavy Duty Handling Robots Lift Loads of 350kg: High-Speed MotionDocument2 pagesHeavy Duty Handling Robots Lift Loads of 350kg: High-Speed MotionXanti Zabala Da RosaNo ratings yet
- M 10ia SeriesDocument2 pagesM 10ia Seriessenior_cor73zNo ratings yet
- Product Range PDFDocument16 pagesProduct Range PDFKevin MichaelNo ratings yet
- M 410ib FootprintDocument4 pagesM 410ib Footprintto0984903132No ratings yet
- Motor Heavy Duty - Rev01 01.02.2021Document6 pagesMotor Heavy Duty - Rev01 01.02.2021fortizuNo ratings yet
- SRA100/166/210/166L/120EL: World Class Speed RobotDocument2 pagesSRA100/166/210/166L/120EL: World Class Speed RobotXanti Zabala Da RosaNo ratings yet
- Servo Positioner: Positioner For Coordinated Arc Welding Robot SystemDocument4 pagesServo Positioner: Positioner For Coordinated Arc Welding Robot SystemRicardo Castro SalazarNo ratings yet
- RM 10iAN (E) 02aDocument2 pagesRM 10iAN (E) 02apc100xohmNo ratings yet
- And Versatile: Strong, CompactDocument2 pagesAnd Versatile: Strong, Compactperop123No ratings yet
- Scara SR 12ia Flyer enDocument2 pagesScara SR 12ia Flyer enJorge Israel Suárez AguilarNo ratings yet
- R 2000ic 100P Flyer ENDocument2 pagesR 2000ic 100P Flyer ENperop123No ratings yet
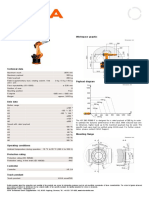
- KR 280 R3080 F: Workspace GraphicDocument1 pageKR 280 R3080 F: Workspace GraphicDorobantu CatalinNo ratings yet
- RobotStudio Operation Manual PDFDocument298 pagesRobotStudio Operation Manual PDFEmanuelNo ratings yet
- Release Notes RobotStudio 2019-5 PDFDocument44 pagesRelease Notes RobotStudio 2019-5 PDFXanti Zabala Da RosaNo ratings yet
- RobotWare 6 DatasheetDocument4 pagesRobotWare 6 DatasheetXanti Zabala Da RosaNo ratings yet
- Program Editor User ManualDocument14 pagesProgram Editor User ManualXanti Zabala Da RosaNo ratings yet
- SRA100H-SRA133HL Rev2 BrochureDocument2 pagesSRA100H-SRA133HL Rev2 BrochureXanti Zabala Da RosaNo ratings yet
- Nachi Robot Catalog 2012Document20 pagesNachi Robot Catalog 2012Xanti Zabala Da RosaNo ratings yet
- Cleanroom CR7 E 06.2015Document2 pagesCleanroom CR7 E 06.2015Xanti Zabala Da RosaNo ratings yet
- SRA166 210 01A BrochureDocument2 pagesSRA166 210 01A BrochureXanti Zabala Da RosaNo ratings yet
- Ssraen 071 006 - Sra H 01 FD11Document30 pagesSsraen 071 006 - Sra H 01 FD11Eddy AlmeidaNo ratings yet
- SC400L-SC500 Standard SpecificationsDocument26 pagesSC400L-SC500 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- EZ03-02 Standard SpecificationsDocument28 pagesEZ03-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- SC700 Standard SpecificationsDocument15 pagesSC700 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- NV06 02 FD11 Standard SpecificationsDocument22 pagesNV06 02 FD11 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- MZ04 Standard SpecificationsDocument29 pagesMZ04 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- NV06L 02 FD11 Standard SpecificationsDocument22 pagesNV06L 02 FD11 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- NB04L 02 FD11 Standard SpecificationsDocument22 pagesNB04L 02 FD11 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- MZ07-02 Standard SpecificationsDocument18 pagesMZ07-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- MC600 BrochureDocument2 pagesMC600 BrochureXanti Zabala Da RosaNo ratings yet
- MC400L BrochureDocument2 pagesMC400L BrochureXanti Zabala Da RosaNo ratings yet
- Vector Tutorial PDFDocument32 pagesVector Tutorial PDFRayven Doromal100% (1)
- Operating Instructions: LPG Forklift TruckDocument288 pagesOperating Instructions: LPG Forklift TruckLoboncz NorbertNo ratings yet
- Java Section 4 IlearningDocument17 pagesJava Section 4 IlearningAlexander SamuelNo ratings yet
- Conbextra ATDocument2 pagesConbextra ATLOPA THANDARNo ratings yet
- Oise Ibration and Arshness: by C.Venkatanarayana 163701Document27 pagesOise Ibration and Arshness: by C.Venkatanarayana 163701prasanthNo ratings yet
- RPD DesignDocument30 pagesRPD DesignAlex M MwangiNo ratings yet
- Safety ADAS & Conncted Vehicle - Walter HagleitnerDocument24 pagesSafety ADAS & Conncted Vehicle - Walter HagleitnerLogtelNo ratings yet
- Teleprotection Equipment NSD570: Communication NetworksDocument8 pagesTeleprotection Equipment NSD570: Communication NetworksTeklu Abebe WoldeNo ratings yet
- Finned Tube Heat ExchangerDocument3 pagesFinned Tube Heat ExchangerShreya Sahajpal KaushalNo ratings yet
- MC188 MimioTeachDocument2 pagesMC188 MimioTeachLuis Carlos Bonilla AldanaNo ratings yet
- Romax7300 PDFDocument2 pagesRomax7300 PDFdalton2003No ratings yet
- Testing of I C Engines VTUDocument31 pagesTesting of I C Engines VTUPolireddi Gopala KrishnaNo ratings yet
- 5 2 MIBquickReferenceGuideDocument82 pages5 2 MIBquickReferenceGuideAbdallah Ben HamidaNo ratings yet
- Revanth ResumeDocument2 pagesRevanth Resumep revanthNo ratings yet
- Wind Screen Film ComparisonDocument2 pagesWind Screen Film ComparisonAmarjit SinghNo ratings yet
- Plates & Angle Technical SubmittalDocument47 pagesPlates & Angle Technical SubmittalErdal CanNo ratings yet
- 1 1 - 5d - I E F S1736Document30 pages1 1 - 5d - I E F S1736Ramius HamdaniNo ratings yet
- Manufacturing Quality Plan (MQP)Document2 pagesManufacturing Quality Plan (MQP)Ranjit SinghNo ratings yet
- UX Guide Springboard UX Career Guide PDFDocument15 pagesUX Guide Springboard UX Career Guide PDFtotalmenteprovisorioNo ratings yet
- Fluid Mechanics 2 Chapter 3 PDFDocument18 pagesFluid Mechanics 2 Chapter 3 PDFsakali aliNo ratings yet
- Dead Ringer Spinning ReelDocument1 pageDead Ringer Spinning ReelGergely IvánovicsNo ratings yet
- BLSC Newsletter 269 Fall 2015Document8 pagesBLSC Newsletter 269 Fall 2015api-237606250No ratings yet
- Gs W 4205010 02 en - Purian - GSW Office Plus H - Hidden HingeDocument1 pageGs W 4205010 02 en - Purian - GSW Office Plus H - Hidden HingeMarinaNo ratings yet
- TORCSDocument15 pagesTORCSJavier Vinuesa MuñozNo ratings yet
- Basement Construction DetailsDocument1 pageBasement Construction DetailsShubham PatilNo ratings yet
- Aecom Brochure PDFDocument23 pagesAecom Brochure PDFAlexandru GateiuNo ratings yet
- FT 897 ServiceDocument85 pagesFT 897 ServiceRemy JuskowiakNo ratings yet
- Madakasira Drawings PDFDocument156 pagesMadakasira Drawings PDFravindrarao_mNo ratings yet