Download as pdf or txt
You might also like
- Physics S.B.A #1Document21 pagesPhysics S.B.A #1Trevor G. Samaroo71% (7)
- Solutions Thomas Calculus 14th EditionDocument39 pagesSolutions Thomas Calculus 14th EditionLMNOP50% (2)
- ExAm-Applying Newton's LawsDocument21 pagesExAm-Applying Newton's LawsOnur YavuzcetinNo ratings yet
- Astronomy TimelineDocument15 pagesAstronomy TimelineAqilah Abu SemanNo ratings yet
- IES 1995 - I ScanDocument21 pagesIES 1995 - I ScanJOYNo ratings yet
- Elasticity and Fluid Machanics - 09-Solution - 2Document4 pagesElasticity and Fluid Machanics - 09-Solution - 2Raju SinghNo ratings yet
- A First Course in General Relativity SolDocument41 pagesA First Course in General Relativity SolArpan PalNo ratings yet
- A First Course in General Relativity SolDocument41 pagesA First Course in General Relativity SolArpan Pal100% (2)
- EE5381 HomeworkDocument4 pagesEE5381 HomeworkDat Dart NguyenNo ratings yet
- PCV Ch4Document34 pagesPCV Ch4Happy QuadriNo ratings yet
- Test 15 - PaperDocument17 pagesTest 15 - PaperAashika DhareNo ratings yet
- The Standard Model and (Some Of) Its ExtensionsDocument30 pagesThe Standard Model and (Some Of) Its ExtensionsManzoor aliNo ratings yet
- Bernoulli's TheoremDocument4 pagesBernoulli's TheoremPranav DeshpandeNo ratings yet
- Assignment-EE 361/chapter 3: Yt T GT TDocument4 pagesAssignment-EE 361/chapter 3: Yt T GT TIbrahim SiddiquiNo ratings yet
- TNS YhkdDocument18 pagesTNS YhkdRK TradingNo ratings yet
- Assignment 3Document4 pagesAssignment 3AnasNo ratings yet
- Assignment 3aDocument4 pagesAssignment 3aShahzaib NadeemNo ratings yet
- Ioqa 2021 22 Part I SolutionDocument7 pagesIoqa 2021 22 Part I SolutionNigamjeeNo ratings yet
- Netter 6a Edicion ApaisadoDocument317 pagesNetter 6a Edicion Apaisadodelivery copyNo ratings yet
- FT I LL: Professor of MathematicsDocument3 pagesFT I LL: Professor of Mathematicsaman agarwalNo ratings yet
- Computational Fluid Dynamics : Porf. M. SharifpurDocument16 pagesComputational Fluid Dynamics : Porf. M. SharifpurTatenda NyabadzaNo ratings yet
- Kochin Function: M K M F Z e H RDocument1 pageKochin Function: M K M F Z e H Rrohit derajNo ratings yet
- Physics - Campus Test Paper-1 NEWDocument5 pagesPhysics - Campus Test Paper-1 NEWSudhir Kumar100% (2)
- Sample Paper - Campus Recruitment Test-Physics MedicalDocument5 pagesSample Paper - Campus Recruitment Test-Physics MedicalRani PandeyNo ratings yet
- Renard HJ 20092Document1 pageRenard HJ 20092YannickNo ratings yet
- Lec. 3Document50 pagesLec. 3mustafa alasadyNo ratings yet
- Problem38 77Document1 pageProblem38 77IENCSNo ratings yet
- TN Set Exam 2018 Question Paper PhysicsDocument18 pagesTN Set Exam 2018 Question Paper PhysicsVengatNo ratings yet
- TEST PAPER-XI TH-packageDocument9 pagesTEST PAPER-XI TH-packagedillipNo ratings yet
- Handout - 05 (CT)Document2 pagesHandout - 05 (CT)Mohian RahmanNo ratings yet
- EE242 PS3 SolutionDocument22 pagesEE242 PS3 Solutionomarsiddiqui8No ratings yet
- Gen Meta JAP v4Document15 pagesGen Meta JAP v4juee chandrachudNo ratings yet
- (@NEETpassionate) Aakash Mock Test - DDocument19 pages(@NEETpassionate) Aakash Mock Test - DShankhayan DuttaNo ratings yet
- Design of Iir FiltersDocument26 pagesDesign of Iir FiltersAnuNo ratings yet
- Design Notes3Document34 pagesDesign Notes3Wesley SaenzNo ratings yet
- EE207 Problem Set 3 IIT ROPARDocument12 pagesEE207 Problem Set 3 IIT ROPARsumithasreekumar5No ratings yet
- RTS01 Solved Paper 11TH IPTY01N02Document21 pagesRTS01 Solved Paper 11TH IPTY01N02Neeti NepalNo ratings yet
- Finite Difference MethodsDocument9 pagesFinite Difference MethodskirthanaNo ratings yet
- Midterm TakeHomeDocument3 pagesMidterm TakeHomeHilalAldemirNo ratings yet
- Application of Integral CalculusDocument8 pagesApplication of Integral Calculusakib.07 the bossNo ratings yet
- Presentation On Laplace TransformsDocument36 pagesPresentation On Laplace TransformsRahul SinghNo ratings yet
- Cusat PapersDocument2 pagesCusat PapersAbheek KashyapNo ratings yet
- An Electron As A Wave Packet in The Relativistic Strophotron FelDocument8 pagesAn Electron As A Wave Packet in The Relativistic Strophotron FelXiu LiNo ratings yet
- MHTCET Compendium PCM 1644831007255Document180 pagesMHTCET Compendium PCM 1644831007255dfgb fbnNo ratings yet
- Straight Lines Solution JEE Advanced Archive DTS-2Document7 pagesStraight Lines Solution JEE Advanced Archive DTS-2nervoussolomon3No ratings yet
- Do Not Remove From Booklet: 2007 Grade 11 Formula SheetDocument1 pageDo Not Remove From Booklet: 2007 Grade 11 Formula Sheetgourlem9210No ratings yet
- Introduction To Telecommunication EngineeringTelecommunication LaboratoryDocument36 pagesIntroduction To Telecommunication EngineeringTelecommunication Laboratoryansarahamed.aNo ratings yet
- Class #8: Structural DynamicsDocument15 pagesClass #8: Structural DynamicsYesufNo ratings yet
- Csir-Ugc-Net/Jrf - June - 2015: F T With Time Period T As Shown in The Figure BelowDocument10 pagesCsir-Ugc-Net/Jrf - June - 2015: F T With Time Period T As Shown in The Figure BelowVibek MauryaNo ratings yet
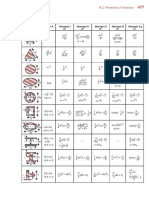
- Tablas - Momentos de InerciaDocument2 pagesTablas - Momentos de InerciaMexi NautasNo ratings yet
- CML100 - Quantum Sheet 2 PDFDocument2 pagesCML100 - Quantum Sheet 2 PDFDivyansh Gupta100% (1)
- 1 Parabolas 2 Circles 3 Ellipses 4 Hyperbolas 5 ExerciesDocument6 pages1 Parabolas 2 Circles 3 Ellipses 4 Hyperbolas 5 ExerciesKyle VuNo ratings yet
- 5vector FunctionDocument24 pages5vector FunctionNur HannaNo ratings yet
- Thomas Calculus Early Transcendentals 14th Edition Hass Solutions ManualDocument36 pagesThomas Calculus Early Transcendentals 14th Edition Hass Solutions Manualcodle.flasher26qf5100% (33)
- Dwnload Full Thomas Calculus Early Transcendentals 14th Edition Hass Solutions Manual PDFDocument36 pagesDwnload Full Thomas Calculus Early Transcendentals 14th Edition Hass Solutions Manual PDFtextury.exarchhz1nm8100% (9)
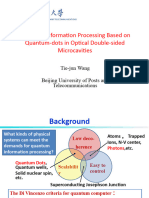
- Quantum Information Processing Based On Quantum-Dots in Optical NewDocument21 pagesQuantum Information Processing Based On Quantum-Dots in Optical NewMounir BounaimaNo ratings yet
- Multiple-Choice Test Runge-Kutta 4th Order Method: y X Xy DX DyDocument3 pagesMultiple-Choice Test Runge-Kutta 4th Order Method: y X Xy DX DyDr Razak Olusegun Alli-Oke100% (1)
- ES 442 Homework #8: SolutionsDocument5 pagesES 442 Homework #8: SolutionsloveNo ratings yet
- Conic Sections Circle: X H (H, K)Document4 pagesConic Sections Circle: X H (H, K)JadeChristynLeonorNo ratings yet
- 33laplace Transforms and Non Standard Functions PDFDocument4 pages33laplace Transforms and Non Standard Functions PDFkinfeNo ratings yet
- Term Paper XIX EED-323Document1 pageTerm Paper XIX EED-323Kanav MahajanNo ratings yet
- Algebra, Topology, and Category Theory: A Collection of Papers in Honor of Samuel EilenbergFrom EverandAlgebra, Topology, and Category Theory: A Collection of Papers in Honor of Samuel EilenbergAlex HellerRating: 5 out of 5 stars5/5 (1)
- MS Poster PDFDocument1 pageMS Poster PDFJaseel Hassan KNo ratings yet
- Aris Mashzone: Cool Business Mashups in MinutesDocument2 pagesAris Mashzone: Cool Business Mashups in MinutesJaseel Hassan KNo ratings yet
- Information For Admission To M.Tech/M.Plan. Programmes Under CCMT 2019-NSR RoundDocument3 pagesInformation For Admission To M.Tech/M.Plan. Programmes Under CCMT 2019-NSR RoundJaseel Hassan KNo ratings yet
- Managed File Transfer Solution: Webmethods ActivetransferDocument2 pagesManaged File Transfer Solution: Webmethods ActivetransferJaseel Hassan KNo ratings yet
- Luthfi Unnimoyin P K: Career ObjectiveDocument1 pageLuthfi Unnimoyin P K: Career ObjectiveJaseel Hassan KNo ratings yet
- HP ThinPro 6.1 - Administrator GuideDocument159 pagesHP ThinPro 6.1 - Administrator GuideJaseel Hassan KNo ratings yet
- Vector Space Note Set 4Document10 pagesVector Space Note Set 4Jaseel Hassan KNo ratings yet
- Ganesh Resume PDFDocument1 pageGanesh Resume PDFJaseel Hassan KNo ratings yet
- StudentsHandbook 2017 18 Ver 3Document32 pagesStudentsHandbook 2017 18 Ver 3Jaseel Hassan KNo ratings yet
- Afm Model Question PaperDocument3 pagesAfm Model Question PaperJaseel Hassan KNo ratings yet
- Banking Resume For FreshersDocument1 pageBanking Resume For FreshersJaseel Hassan KNo ratings yet
- Ktu Principles of Management Notes Module 3Document8 pagesKtu Principles of Management Notes Module 3Jaseel Hassan KNo ratings yet
- 3.1.1 One Dimensional Line Elements: Module 3: Element Properties Lecture 1: Natural CoordinatesDocument8 pages3.1.1 One Dimensional Line Elements: Module 3: Element Properties Lecture 1: Natural CoordinatesJaseel Hassan KNo ratings yet
- ME374 Theory of VibrationsDocument3 pagesME374 Theory of VibrationsJaseel Hassan KNo ratings yet
- Solution To Assignment 3Document5 pagesSolution To Assignment 3Jaseel Hassan KNo ratings yet
- ME304 Dynamics of MachineryDocument3 pagesME304 Dynamics of MachinerySojuNo ratings yet
- Straw Waves and Energy TransferDocument3 pagesStraw Waves and Energy TransferZola LemmaNo ratings yet
- Newton's Law of Gravitation:: For V SemesterDocument9 pagesNewton's Law of Gravitation:: For V SemesterManjita BudhirajaNo ratings yet
- TOPIC 2 - Gravitation and GPEDocument57 pagesTOPIC 2 - Gravitation and GPELuke kenneth MacalawaNo ratings yet
- Dry Density CorrectionDocument1 pageDry Density Correctionorville neal merinoNo ratings yet
- Aneka TabelDocument25 pagesAneka TabelIrfan FebrianNo ratings yet
- CHAP2Document28 pagesCHAP2Dimuthu DharshanaNo ratings yet
- Grade 10 Physics Assignment Notes 1Document25 pagesGrade 10 Physics Assignment Notes 1habiba buttNo ratings yet
- Edexcel GCSE Additonal Science P2 Topic 4 Test 13 - 14 With Marks SchemeDocument15 pagesEdexcel GCSE Additonal Science P2 Topic 4 Test 13 - 14 With Marks SchemePaul BurgessNo ratings yet
- Activity 2: Boyle's Law ObjectiveDocument4 pagesActivity 2: Boyle's Law Objectiveaiko teodoroNo ratings yet
- PhysicsDocument17 pagesPhysicsShubham VermaNo ratings yet
- IMSP PHYS 3 Course Syllabus PDFDocument4 pagesIMSP PHYS 3 Course Syllabus PDFBAI Team BiotechNo ratings yet
- 001 Units & DimensionsDocument13 pages001 Units & DimensionsVaibhav TripathiNo ratings yet
- To measure the mass moment of inertia of an internal combustion engine’s connecting rod, and 2. To apply the parallel axes theorem to determine the mass moment of inertia about an axis passing through the centre of mass of the connecting rod.Document9 pagesTo measure the mass moment of inertia of an internal combustion engine’s connecting rod, and 2. To apply the parallel axes theorem to determine the mass moment of inertia about an axis passing through the centre of mass of the connecting rod.Isfakul Shihan100% (1)
- PHYSICS REVISION - DPP-1 - EnglishDocument12 pagesPHYSICS REVISION - DPP-1 - EnglishSatyam JaiswalNo ratings yet
- Activity #1 Week One 2ND QTRDocument3 pagesActivity #1 Week One 2ND QTRCamille ManlongatNo ratings yet
- 八升九练习题WeightDocument10 pages八升九练习题WeightsfejwofNo ratings yet
- Newton's Law of MotionDocument19 pagesNewton's Law of MotionCindy BononoNo ratings yet
- PhysicsDocument54 pagesPhysicsRey BalberanNo ratings yet
- Scope: Astm D 4643 - Microwave Method of Drying SoilsDocument2 pagesScope: Astm D 4643 - Microwave Method of Drying SoilsEdvin Neil Huamanguillas ParavecinoNo ratings yet
- 2015 SEPT Winelands Physics P 1Document18 pages2015 SEPT Winelands Physics P 1NISSIBETINo ratings yet
- LPQ1ADocument9 pagesLPQ1AMARVIN HILARIONo ratings yet
- 10SHM PDFDocument6 pages10SHM PDFAman BhuttaNo ratings yet
- Ground Support Methodology Employing Shotcrete For Underground Mines (2010)Document10 pagesGround Support Methodology Employing Shotcrete For Underground Mines (2010)oscar2302100% (1)
- BMI Power Point December 2021Document11 pagesBMI Power Point December 2021Nil NatividadNo ratings yet
- Thesis in Mass Communication PDFDocument9 pagesThesis in Mass Communication PDFKaela Johnson100% (2)
- Test For EcatDocument3 pagesTest For EcatKamran AliNo ratings yet
- Notes 15Document6 pagesNotes 15BoyntonhighNo ratings yet