Download as pdf or txt
You might also like
- Bisb - Bank StatementDocument23 pagesBisb - Bank Statementazstartup.bhNo ratings yet
- Multiple Choice Question (MCQ) of Alternator and Synchronous Motors PageDocument29 pagesMultiple Choice Question (MCQ) of Alternator and Synchronous Motors Pagekibrom atsbha50% (2)
- Social Justice. History, Theory, Research. Jost2010Document44 pagesSocial Justice. History, Theory, Research. Jost2010kostzaf0% (1)
- Experiment 9 Sequential Circuits: Introduction To CountersDocument5 pagesExperiment 9 Sequential Circuits: Introduction To CountersSatyamNo ratings yet
- Electronic 1 Lab 4 PDocument10 pagesElectronic 1 Lab 4 PAtyia JavedNo ratings yet
- DLD 5 Lab ReportsDocument25 pagesDLD 5 Lab ReportsHamza Shah100% (1)
- 3rd Int. Sequence Detector PDFDocument19 pages3rd Int. Sequence Detector PDFUtsav ParasharNo ratings yet
- Objective Type Question or MCQ of Transmission and DistributionDocument62 pagesObjective Type Question or MCQ of Transmission and Distributionkibrom atsbha83% (18)
- Multiple Choice Question (MCQ) of Induction MotorsDocument18 pagesMultiple Choice Question (MCQ) of Induction Motorskibrom atsbha75% (4)
- Multiple Choice Question (MCQ) of D.C. MachinesDocument26 pagesMultiple Choice Question (MCQ) of D.C. Machineskibrom atsbha100% (2)
- Multiple Choice Question (MCQ) of Control SystemsDocument27 pagesMultiple Choice Question (MCQ) of Control Systemskibrom atsbha67% (6)
- EE101 - Quiz #1Document16 pagesEE101 - Quiz #1Rick AlvientoNo ratings yet
- Electricity at HomeDocument10 pagesElectricity at HomeWilliam HaNo ratings yet
- Electrical Engineering Questions 11Document1 pageElectrical Engineering Questions 11tutulkarNo ratings yet
- Level 4 Diploma in Electrical and Electronic Engineering v2 PDFDocument139 pagesLevel 4 Diploma in Electrical and Electronic Engineering v2 PDFD Gihan PereraNo ratings yet
- Electrical Safety ChecklistDocument1 pageElectrical Safety ChecklistmahmoudmakladNo ratings yet
- Nand GateDocument5 pagesNand GateNeeraj SharmaNo ratings yet
- C1 Basic ConceptsDocument54 pagesC1 Basic ConceptsPEi PAiNo ratings yet
- Lab 4: Introduction To Operational Amplifiers: ObjectiveDocument10 pagesLab 4: Introduction To Operational Amplifiers: Objectivepaul omondi ochiengNo ratings yet
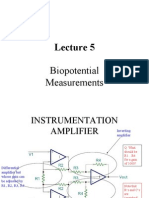
- Lecture 5 - Biopotential MeasurementsDocument59 pagesLecture 5 - Biopotential Measurementsapi-27535945100% (2)
- Different Types of DiodesDocument8 pagesDifferent Types of DiodesAllelie UgotNo ratings yet
- 555 Timer IC - WikipediaDocument20 pages555 Timer IC - WikipediaJuniorNo ratings yet
- SolutionsDocument9 pagesSolutionsdavid_benavidez_3No ratings yet
- 1-Introduction To Semiconductor MaterialsDocument43 pages1-Introduction To Semiconductor MaterialsStevie AdrielNo ratings yet
- Assignment BriefDocument5 pagesAssignment BriefDaniel AdebayoNo ratings yet
- Cs Imp QuestDocument3 pagesCs Imp QuestLordwin MichealNo ratings yet
- Analogue ElectronicsDocument7 pagesAnalogue ElectronicsrizwanahbNo ratings yet
- Electronic Digital CircuitsDocument33 pagesElectronic Digital Circuitskathrin_jazz26No ratings yet
- De Practical FileDocument140 pagesDe Practical FileSahil BharalNo ratings yet
- Edc Lab ManualDocument70 pagesEdc Lab ManualreneeshczNo ratings yet
- Comparator and Schmitt Trigger Circuit Using Op-Amp: Experiment No. 11Document3 pagesComparator and Schmitt Trigger Circuit Using Op-Amp: Experiment No. 1124-VICKY PAWARNo ratings yet
- The D Flip FlopDocument7 pagesThe D Flip FlopAlinChanNo ratings yet
- FSM Melay Using 1011Document3 pagesFSM Melay Using 1011dineshvhavalNo ratings yet
- Intercom InstructionsDocument3 pagesIntercom InstructionsJohn OrokNo ratings yet
- Experiment 1 Breadboard ImplementationDocument3 pagesExperiment 1 Breadboard ImplementationJeremy Lorenzo Teodoro VirataNo ratings yet
- Chapter9pp082 089 PDFDocument8 pagesChapter9pp082 089 PDFInderMaheshNo ratings yet
- Chapter13pp122 133 PDFDocument12 pagesChapter13pp122 133 PDFInderMaheshNo ratings yet
- Lab ManualDocument19 pagesLab ManualSanthi SriNo ratings yet
- Micro ProcesserDocument18 pagesMicro ProcesserChaitali Binzade0% (1)
- VHDL ppt1Document37 pagesVHDL ppt1mdhuq1No ratings yet
- Lecture 12 (ADC) Rv01Document47 pagesLecture 12 (ADC) Rv01Amirul HaqimieNo ratings yet
- VHDL Codes For Various Combinational CircuitsDocument6 pagesVHDL Codes For Various Combinational CircuitsKaranNo ratings yet
- ADC (Analog-To-Digital Converter)Document11 pagesADC (Analog-To-Digital Converter)Abdullah Muzammil0% (1)
- JFET and MOSFETDocument20 pagesJFET and MOSFETmbkfet100% (1)
- CMRR and PSRR PDFDocument3 pagesCMRR and PSRR PDFManojkumarNo ratings yet
- Transistor Transistor LogicDocument33 pagesTransistor Transistor LogicCaranto Lois CarantoNo ratings yet
- Experiment No.: 02 Experiment Name: Study The Methods of Representation and Simplification of Logic Equations by Boolean AlgebraDocument4 pagesExperiment No.: 02 Experiment Name: Study The Methods of Representation and Simplification of Logic Equations by Boolean AlgebraPiyas ChowdhuryNo ratings yet
- 1 DiodeDocument151 pages1 DiodeOmar OdehNo ratings yet
- To Make A DC Switching Circuit Using SCR'sDocument2 pagesTo Make A DC Switching Circuit Using SCR'sH Aries OñaNo ratings yet
- Electronics Lecture Notes IIDocument31 pagesElectronics Lecture Notes IIWaltas KariukiNo ratings yet
- 2391 Revision Questions 2 PDFDocument39 pages2391 Revision Questions 2 PDFgrand_ammarNo ratings yet
- Title: Implementation OF Sr-Latches & Flip Flops Using Nand &nor Lab Worksheet #12Document3 pagesTitle: Implementation OF Sr-Latches & Flip Flops Using Nand &nor Lab Worksheet #12MUNEEB SHAHNo ratings yet
- Hve Numerical MethodsDocument17 pagesHve Numerical MethodsSainadh SinghNo ratings yet
- Common Engineering ToolsDocument28 pagesCommon Engineering ToolsTine ArevaloNo ratings yet
- CS 102 Lab 1Document18 pagesCS 102 Lab 1Abdulaziz Altararwah0% (1)
- Ecad & Vlsi LabDocument98 pagesEcad & Vlsi LabbitseceNo ratings yet
- Ard1 - Using 7-Segment and PWMDocument8 pagesArd1 - Using 7-Segment and PWMaliNo ratings yet
- Circuit Theory - Solved Assignments - Semester Fall 2005Document18 pagesCircuit Theory - Solved Assignments - Semester Fall 2005Muhammad Umair50% (2)
- DSP Lecture OneDocument5 pagesDSP Lecture OnelyalashwanyNo ratings yet
- Gate Level DesignDocument34 pagesGate Level DesignYOGESWARI TOLIANo ratings yet
- Ee2253 - Control Systems April-May 2010Document3 pagesEe2253 - Control Systems April-May 2010durgabalNo ratings yet
- Rajneesh Yadav - Untitleddesign - Original PDFDocument4 pagesRajneesh Yadav - Untitleddesign - Original PDFsantvan jagtapNo ratings yet
- Question Paper Code:: (10×2 20 Marks)Document4 pagesQuestion Paper Code:: (10×2 20 Marks)MohamedNo ratings yet
- Svcet Svcet: B. E./B.Tech. Degree Examination, Apriiimay 2005Document4 pagesSvcet Svcet: B. E./B.Tech. Degree Examination, Apriiimay 2005lllllllllllNo ratings yet
- Ee 14402Document2 pagesEe 14402vivanNo ratings yet
- PTEE7301 April-2021Document2 pagesPTEE7301 April-2021imman46920No ratings yet
- ControllingDocument25 pagesControllingkibrom atsbhaNo ratings yet
- Ee2255 - Digital Logic Circuits April-May 2010Document3 pagesEe2255 - Digital Logic Circuits April-May 2010kibrom atsbhaNo ratings yet
- Multiple Choice Question (MCQ) of MeasurementsDocument60 pagesMultiple Choice Question (MCQ) of Measurementskibrom atsbhaNo ratings yet
- Question Paper Code: 55332: B.E./B.Tech - Degree Examinations, Nov/Dec 2011 Regulations 2008Document3 pagesQuestion Paper Code: 55332: B.E./B.Tech - Degree Examinations, Nov/Dec 2011 Regulations 2008kibrom atsbhaNo ratings yet
- Ee 2351 Power System Analysis Anna University Question PaperDocument2 pagesEe 2351 Power System Analysis Anna University Question Paperkibrom atsbhaNo ratings yet
- Ee 2254 Linear Integrated Circuits and Applications Anna University Previous Year Question PaperDocument2 pagesEe 2254 Linear Integrated Circuits and Applications Anna University Previous Year Question Paperkibrom atsbhaNo ratings yet
- PRPDocument4 pagesPRPkibrom atsbhaNo ratings yet
- Question Paper Code: 55333: B.E./B.Tech. DEGREE EXAMINATIONS, NOV./DEC. 2011 Regulations 2008Document3 pagesQuestion Paper Code: 55333: B.E./B.Tech. DEGREE EXAMINATIONS, NOV./DEC. 2011 Regulations 2008kibrom atsbhaNo ratings yet
- Multiple Choice Question (MCQ) of ElectronicsDocument64 pagesMultiple Choice Question (MCQ) of Electronicskibrom atsbhaNo ratings yet
- MCQ of D.C MotorDocument10 pagesMCQ of D.C Motorkibrom atsbhaNo ratings yet
- Multiple Choice Question (MCQ) of ElectronicsDocument64 pagesMultiple Choice Question (MCQ) of Electronicskibrom atsbhaNo ratings yet
- MCQ of Basic ElectricalDocument11 pagesMCQ of Basic Electricalkibrom atsbhaNo ratings yet
- Objective Type Question or MCQ of Electrical Circuits and Magnetic FieldsDocument76 pagesObjective Type Question or MCQ of Electrical Circuits and Magnetic Fieldskibrom atsbha100% (3)
- MCQ of D.C GeneratorsDocument29 pagesMCQ of D.C Generatorskibrom atsbha50% (2)
- MCQ of Electrical MachinesDocument78 pagesMCQ of Electrical Machineskibrom atsbhaNo ratings yet
- MCQ of TransformersDocument26 pagesMCQ of Transformerskibrom atsbha67% (3)
- Generated by CamscannerDocument11 pagesGenerated by Camscannerkibrom atsbhaNo ratings yet
- Interview Questions of Basic ElectricityDocument14 pagesInterview Questions of Basic Electricitykibrom atsbhaNo ratings yet
- 8086 Addressing ModesDocument63 pages8086 Addressing Modeskibrom atsbhaNo ratings yet
- Interview Question of Underground CableDocument18 pagesInterview Question of Underground Cablekibrom atsbha100% (1)
- Unit-4 Insulators and Cables: ConductorsDocument12 pagesUnit-4 Insulators and Cables: Conductorskibrom atsbhaNo ratings yet
- Chemical Engineering Department College of Engineering and Technology Adigrat UniversityDocument33 pagesChemical Engineering Department College of Engineering and Technology Adigrat Universitykibrom atsbhaNo ratings yet
- Samsung UA55KU7000 55 Inch 139cm Smart Ultra HD LED LCD TV User ManualDocument18 pagesSamsung UA55KU7000 55 Inch 139cm Smart Ultra HD LED LCD TV User ManualGuruprasad NagarajasastryNo ratings yet
- Example of Fan Selection: Selecting ProcedureDocument2 pagesExample of Fan Selection: Selecting ProcedureBaoLCNo ratings yet
- Adam Black2004Document8 pagesAdam Black2004Kókai BalázsNo ratings yet
- Republic Act No 7920Document3 pagesRepublic Act No 7920Ako Si Goldie100% (1)
- Types of Evaporators Castro EdgarDocument18 pagesTypes of Evaporators Castro EdgarJeshua Llorera100% (1)
- AnthraxDocument2 pagesAnthraxAmon Jnr KamungarangaNo ratings yet
- Amanda Willemot Resume 1Document3 pagesAmanda Willemot Resume 1api-256464743No ratings yet
- Chamberlain 01 SeafoodMealsDocument42 pagesChamberlain 01 SeafoodMealsJohn KaruwalNo ratings yet
- Tilt TableDocument2 pagesTilt TablenikhilNo ratings yet
- Ch9 2021 2Document19 pagesCh9 2021 2muhiafrancis975No ratings yet
- JD Edwards Enterpriseone Tools: Ibm Websphere Portal For Microsoft Windows Guide Release 9.1Document110 pagesJD Edwards Enterpriseone Tools: Ibm Websphere Portal For Microsoft Windows Guide Release 9.1muonhieubietNo ratings yet
- 1 Concept Paper On The 6-Year CurriculumDocument9 pages1 Concept Paper On The 6-Year CurriculumJoseph Tabadero Jr.100% (3)
- Contour Lines: Representation of HeightsDocument42 pagesContour Lines: Representation of HeightsTheresa BrownNo ratings yet
- Form Based Document Understanding Using Sequential ModelDocument10 pagesForm Based Document Understanding Using Sequential ModelIJRASETPublicationsNo ratings yet
- Quiz No. 1 Audit Opinion and Audit of Cash Part 1 PDFDocument4 pagesQuiz No. 1 Audit Opinion and Audit of Cash Part 1 PDFrhemanne18No ratings yet
- Media and Information Literacy Is Defined As An Access To InformationDocument2 pagesMedia and Information Literacy Is Defined As An Access To InformationmarvinNo ratings yet
- There's No Pill For This - IntroductionDocument4 pagesThere's No Pill For This - IntroductionChelsea Green PublishingNo ratings yet
- Verification Thevenin's Theorem and Maximum Power TransfeDocument5 pagesVerification Thevenin's Theorem and Maximum Power Transfeabdullah8680% (5)
- Slug LowDocument13 pagesSlug LowDr Mohammed AzharNo ratings yet
- Safety Instrumented Systems: GlobalDocument410 pagesSafety Instrumented Systems: Globalmohammed el erianNo ratings yet
- Filtration Solution To Problems - Pdf-Midterm-Exam-AnswerDocument7 pagesFiltration Solution To Problems - Pdf-Midterm-Exam-AnswerDubu Kim100% (1)
- Fire and Life Safety ConceptDocument23 pagesFire and Life Safety ConceptDeboline MitraNo ratings yet
- Gut DecontaminationDocument17 pagesGut DecontaminationRaju NiraulaNo ratings yet
- Dressmaking 9 - Q2 - Module-2Document21 pagesDressmaking 9 - Q2 - Module-2Judith Bernadez-EspenidoNo ratings yet
- M23 Paper 1 - Official Exam Paper - TZ2Document4 pagesM23 Paper 1 - Official Exam Paper - TZ2sealyzon0fpsNo ratings yet
- Turbojet Engine With T-S DiagramDocument10 pagesTurbojet Engine With T-S Diagramprakash tyagiNo ratings yet
- Z-009-03-2015 - NCS Core Abilities Level 3Document53 pagesZ-009-03-2015 - NCS Core Abilities Level 3Aini KamarudinNo ratings yet
- FM-HS-240-01.7 Full Mob For Use Rev4Document5 pagesFM-HS-240-01.7 Full Mob For Use Rev4VZNo ratings yet