Download as pdf or txt
You might also like
- Goldstein Solution 8Document11 pagesGoldstein Solution 8Marcus MacêdoNo ratings yet
- Damped Harmonic Oscillator: Wednesday, 23 October 2013Document9 pagesDamped Harmonic Oscillator: Wednesday, 23 October 2013MayaIsStupidNo ratings yet
- 6 Lag Rang I An DynamicsDocument17 pages6 Lag Rang I An DynamicsTan Jia En FeliciaNo ratings yet
- Hamiltons Principle 1 PDFDocument23 pagesHamiltons Principle 1 PDFVinaykumar YadavNo ratings yet
- Introduction To Chaos: The Damped, Driven, Nonlinear PendulumDocument14 pagesIntroduction To Chaos: The Damped, Driven, Nonlinear PendulumKikkuNo ratings yet
- 344-Article Text-1317-2-10-20220621Document26 pages344-Article Text-1317-2-10-20220621Kayiin NanaNo ratings yet
- Lagrangian Handout: Ashmit DuttaDocument14 pagesLagrangian Handout: Ashmit DuttaDovletGNo ratings yet
- Lagrangian Handout: Ashmit DuttaDocument14 pagesLagrangian Handout: Ashmit DuttaDovletNo ratings yet
- Chapter 07Document23 pagesChapter 07api-3728553No ratings yet
- Physics IADocument9 pagesPhysics IATaseerNo ratings yet
- Hamilton's Principle and Symmetries: Sourendu GuptaDocument14 pagesHamilton's Principle and Symmetries: Sourendu GuptaSaikat PayraNo ratings yet
- Lagrangian Mechanics ExamplesDocument40 pagesLagrangian Mechanics ExamplesTavish SharmaNo ratings yet
- 03 PDFDocument15 pages03 PDFAlexeiNo ratings yet
- Where Are We Now?: L X (T), X (T), T X (T), X (T), T U X (T), X (T), TDocument15 pagesWhere Are We Now?: L X (T), X (T), T X (T), X (T), T U X (T), X (T), TgornetjNo ratings yet
- Legendre TransformatioDocument17 pagesLegendre TransformatioMohsanNo ratings yet
- Symmetries and Conservation LawsDocument21 pagesSymmetries and Conservation Lawszijun yuNo ratings yet
- Hamiltonian Dynamics: I I I I I IDocument13 pagesHamiltonian Dynamics: I I I I I Ifree_progNo ratings yet
- Lecture 13 SummaryDocument2 pagesLecture 13 SummaryRaúl HugoNo ratings yet
- Classical MechanicsDocument106 pagesClassical MechanicsJoyal Jain100% (1)
- Laplace TransformDocument12 pagesLaplace Transformedgar100% (1)
- Lagrangian and Hamiltonian MechanicsDocument7 pagesLagrangian and Hamiltonian MechanicsNirmaan Shanker100% (1)
- Lec111026 - CoupledOscillations El Del Curso de Mecánica Lec111026 - CoupledOscillations Apuntes Saeta Alto Nivel PDFDocument10 pagesLec111026 - CoupledOscillations El Del Curso de Mecánica Lec111026 - CoupledOscillations Apuntes Saeta Alto Nivel PDFapdpjpNo ratings yet
- VERY VERY - Advanced Dynamics PDFDocument129 pagesVERY VERY - Advanced Dynamics PDFJohn Bird100% (1)
- Lagrangian MechanicsDocument13 pagesLagrangian MechanicsAlda Novita SariNo ratings yet
- Some Examples. Constraints and Lagrange MultipliersDocument15 pagesSome Examples. Constraints and Lagrange MultipliersGuillermoEatonNo ratings yet
- Relativistic Quantum Mechanics: 6.1 The Klein-Gordon EquationDocument17 pagesRelativistic Quantum Mechanics: 6.1 The Klein-Gordon EquationGuillermoNo ratings yet
- Physics - Classical MechanicsDocument131 pagesPhysics - Classical MechanicsDenilson Toneto da Silva100% (1)
- Motion Near Equilibrium - Small OscillationsDocument12 pagesMotion Near Equilibrium - Small OscillationsmojarramanNo ratings yet
- EP 222: Classical Mechanics Tutorial Sheet 1: 2 2 I I 2 I I, J I J 2 IjDocument2 pagesEP 222: Classical Mechanics Tutorial Sheet 1: 2 2 I I 2 I I, J I J 2 IjAshok GargNo ratings yet
- AM Fall 2007 02 Transformations and Conservation LawsDocument11 pagesAM Fall 2007 02 Transformations and Conservation LawsEsteban BejaranoNo ratings yet
- Preliminaries: What You Need To Know: Classical DynamicsDocument5 pagesPreliminaries: What You Need To Know: Classical Dynamicsjamescraig229No ratings yet
- Classical Field Theory - +Document14 pagesClassical Field Theory - +Chief ArisaNo ratings yet
- Seminar TwoDocument3 pagesSeminar TwoibojanglesNo ratings yet
- CH06Document17 pagesCH06maddyNo ratings yet
- Simple PendulumDocument9 pagesSimple Pendulumtayyab569100% (1)
- First Integrals. Reduction. The 2-Body ProblemDocument19 pagesFirst Integrals. Reduction. The 2-Body ProblemShweta SridharNo ratings yet
- 03a PDFDocument7 pages03a PDFAwais YousafNo ratings yet
- Lag RangeDocument4 pagesLag RangeNguyễn Ngọc AnNo ratings yet
- MIT8 09F14 Chapter 1Document29 pagesMIT8 09F14 Chapter 1pestaNo ratings yet
- Stress-Energy Pseudotensors and Gravitational Radiation PowerDocument8 pagesStress-Energy Pseudotensors and Gravitational Radiation Powerhammoudeh13No ratings yet
- NoetreobloxloescnsdcDocument7 pagesNoetreobloxloescnsdcGuiguay GameplaysNo ratings yet
- Classical Mechanics PDFDocument131 pagesClassical Mechanics PDFsgw67No ratings yet
- Kosmas Charged 3796Document6 pagesKosmas Charged 3796mangla bhullarNo ratings yet
- Sec8 PDFDocument6 pagesSec8 PDFRaouf BouchoukNo ratings yet
- Lecture 1: Renormalization Groups David Gross 1.1. What Is Renormalization Group?Document9 pagesLecture 1: Renormalization Groups David Gross 1.1. What Is Renormalization Group?luisdanielNo ratings yet
- Forces Entre La Llum I La MateriaDocument6 pagesForces Entre La Llum I La MateriaPau Castilla GonzálezNo ratings yet
- Euler Lagrange EQ Made Simple Reany p3Document3 pagesEuler Lagrange EQ Made Simple Reany p3Bartolome Antonio Pereira100% (1)
- Adv Mech2Document6 pagesAdv Mech2stefanovicana1No ratings yet
- Note Sad DangDocument16 pagesNote Sad DangEverton LimaNo ratings yet
- Physics 7221 Fall 2006: Final Exam: Gabriela Gonz Alez December 14, 2006Document9 pagesPhysics 7221 Fall 2006: Final Exam: Gabriela Gonz Alez December 14, 2006Julian David Henao EscobarNo ratings yet
- Noether TheoremDocument5 pagesNoether Theoremmikolaj_bugzillaNo ratings yet
- The Euler Lagrange EquationsDocument8 pagesThe Euler Lagrange EquationsDimitrios TriantafyllidisNo ratings yet
- The Heavy Spring at Work: Amelia Carolina SparavignaDocument8 pagesThe Heavy Spring at Work: Amelia Carolina SparavignaXaviSalvadorNo ratings yet
- Poormans Lagrangian MechanicsDocument8 pagesPoormans Lagrangian MechanicsAhmed Saad SabitNo ratings yet
- Lagrangian SummaryDocument2 pagesLagrangian SummaryShweta Sridhar100% (1)
- The Euler-Lagrange Equations and Noether's TheoremDocument15 pagesThe Euler-Lagrange Equations and Noether's TheoremFredy OrjuelaNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Harminder Singh SAP ID-500073564: Social BondsDocument5 pagesHarminder Singh SAP ID-500073564: Social Bondsharminder singhNo ratings yet
- MENINGITIS Lesson PlanDocument12 pagesMENINGITIS Lesson PlannidhiNo ratings yet
- Land Grants in Gupta PeriodDocument3 pagesLand Grants in Gupta PeriodAbhishek DubeyNo ratings yet
- 2012jal PDFDocument239 pages2012jal PDFAfifah WijayaNo ratings yet
- Offer LetterDocument1 pageOffer Letterahmadkahan5272No ratings yet
- ENGINEERING DESIGN GUIDELINES Reboiler Rev1.3web PDFDocument12 pagesENGINEERING DESIGN GUIDELINES Reboiler Rev1.3web PDFSamit MitraNo ratings yet
- Master Presentation AcotecDocument24 pagesMaster Presentation AcotecWIDYANo ratings yet
- Darkness Detector Circuit'Document12 pagesDarkness Detector Circuit'Divya PatilNo ratings yet
- Case Study On Value Engineering: Lesson 10Document16 pagesCase Study On Value Engineering: Lesson 10arunNo ratings yet
- Equator PrinciplesDocument10 pagesEquator Principlesemma monica100% (2)
- Operations Management 10Th Edition Nigel Slack Full ChapterDocument67 pagesOperations Management 10Th Edition Nigel Slack Full Chapterrose.rios155100% (7)
- Catalog STV 25k Series Surge Protective Devices Solahd en Us 163760Document2 pagesCatalog STV 25k Series Surge Protective Devices Solahd en Us 163760Jorge Dario Jarrin VivarNo ratings yet
- AnneCecile RABINE - PortfolioDocument20 pagesAnneCecile RABINE - PortfolioAnne-Cécile RabineNo ratings yet
- Lista de Precios Yim S.A.C. 21-12-20 (20+4)Document27 pagesLista de Precios Yim S.A.C. 21-12-20 (20+4)ivelha publicidadNo ratings yet
- Oracle Report Builder 10gDocument420 pagesOracle Report Builder 10gRodessa Austria100% (1)
- Reasons To Use UWL and CustomizeDocument48 pagesReasons To Use UWL and CustomizeTim ParkerNo ratings yet
- 2005/12/11 Pressure Taps (RENR6473)Document3 pages2005/12/11 Pressure Taps (RENR6473)Edin raul Yalle rafaelNo ratings yet
- V400ACE Ds WebDocument2 pagesV400ACE Ds Webvray3494No ratings yet
- Legal Internship Weekly Reports: Symbiosis Law School, PuneDocument4 pagesLegal Internship Weekly Reports: Symbiosis Law School, Punepranjal100% (1)
- Cargo Handling & Stability - I: Captain Nazim ErsenDocument52 pagesCargo Handling & Stability - I: Captain Nazim ErsenberNo ratings yet
- Foundation Lecture (Abdulhafiz)Document4 pagesFoundation Lecture (Abdulhafiz)desigandNo ratings yet
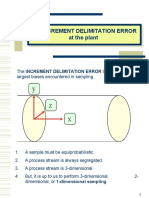
- K Delimitation Error at Plant (New)Document30 pagesK Delimitation Error at Plant (New)ricardo cruzNo ratings yet
- Understanding Economics and How It Affects BusinessDocument7 pagesUnderstanding Economics and How It Affects BusinessHuynh Thi Hong NhungNo ratings yet
- Course Promotional 3Document15 pagesCourse Promotional 3Alexander Klain AquiatanNo ratings yet
- Current Issues, Status and Applications of GIS To Marine FisheriesDocument33 pagesCurrent Issues, Status and Applications of GIS To Marine FisheriesKyran Joeffer EsporlasNo ratings yet
- An Experimental Investigation of Gas Geyser's Heat Exchanger With Addition of EconomizerDocument5 pagesAn Experimental Investigation of Gas Geyser's Heat Exchanger With Addition of EconomizerijaertNo ratings yet
- Ra 8800 - FaqDocument3 pagesRa 8800 - FaqNeil OrtileNo ratings yet
- Filed - 612601 2018 Matthew Cascone V 7 Eleven Inc Summons Complaint 1Document8 pagesFiled - 612601 2018 Matthew Cascone V 7 Eleven Inc Summons Complaint 1MooreKuehnNo ratings yet
- v4 2 11Document7 pagesv4 2 11api-19662887No ratings yet
- Variable Pitch Fan System - If EquippedDocument3 pagesVariable Pitch Fan System - If EquippedEVER DAVID SAAVEDRA HUAYHUANo ratings yet