
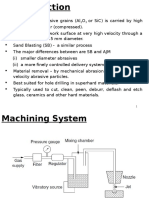
Abrasive Jet Machining
Abrasive Jet Machining
You might also like
- Forces Acting On A PropellerDocument21 pagesForces Acting On A Propellercasandra joaquin100% (2)
- Weld Like a Pro: Beginning to Advanced TechniquesFrom EverandWeld Like a Pro: Beginning to Advanced TechniquesRating: 4.5 out of 5 stars4.5/5 (6)
- Design and Fabrications of Abrasive Jet Machine: Presented byDocument31 pagesDesign and Fabrications of Abrasive Jet Machine: Presented byAnuj TripathiNo ratings yet
- AJMDocument20 pagesAJMAkshay MuleNo ratings yet
- Unconventional Machining ProcessesDocument64 pagesUnconventional Machining Processesdeepak kantipudiNo ratings yet
- AjmDocument22 pagesAjmsuneel kumar rathoreNo ratings yet
- Abrasive Jet MachiningDocument9 pagesAbrasive Jet MachiningArko MazumderNo ratings yet
- Chapter2 - AJMDocument13 pagesChapter2 - AJMravish kumarNo ratings yet
- Abrasive Jet MachiningDocument8 pagesAbrasive Jet MachiningRanjith KaruturiNo ratings yet
- UCMP II UnitDocument59 pagesUCMP II Unit18R21A0310 BIYYALA SHESHAGIRINo ratings yet
- Persentasi B.inggris 2Document17 pagesPersentasi B.inggris 2Mustakim AnsoriNo ratings yet
- An Experimental Investigation On Abrasive Jet Machining by Erosion Abrasive GrainDocument3 pagesAn Experimental Investigation On Abrasive Jet Machining by Erosion Abrasive GrainPkNo ratings yet
- Influences of Natural Abrasives On Glass Cutting Process in Abrasive Jet MachineDocument9 pagesInfluences of Natural Abrasives On Glass Cutting Process in Abrasive Jet MachinePrasad PrinceNo ratings yet
- Abrasive Jet MachiningDocument12 pagesAbrasive Jet MachiningAnonymous N73Nk4RwsNo ratings yet
- Abrasive Jet Machining (AJM) : Material RemovalDocument23 pagesAbrasive Jet Machining (AJM) : Material RemovalHemanth Rama Krishna YernagulaNo ratings yet
- 4a AjmDocument13 pages4a AjmHARSHVARDHAN SINGH RATHORENo ratings yet
- Chapter2 - AJMDocument13 pagesChapter2 - AJMKurniawan ChaniagoNo ratings yet
- Abrasive Jet and Water Jet Machining Mp2Document50 pagesAbrasive Jet and Water Jet Machining Mp2Drew LadlowNo ratings yet
- Module-3: Advanced Material Removal Processes: Lecture No-3Document3 pagesModule-3: Advanced Material Removal Processes: Lecture No-3Abhishek TuliNo ratings yet
- Design and Fabrication of Abrasive Glass Cutting Machine Using Compressed AirDocument4 pagesDesign and Fabrication of Abrasive Glass Cutting Machine Using Compressed AirSujit SinghNo ratings yet
- Abrasive Jet Machining (Ajm) : Dept. of ME, ACEDocument8 pagesAbrasive Jet Machining (Ajm) : Dept. of ME, ACEJabir 08No ratings yet
- NMCOE4054ijarseDocument5 pagesNMCOE4054ijarseUsman AhmadNo ratings yet
- I Hereby Declare That The Project Entitled "DESIGN AND FABRICATION OF WORKINGDocument29 pagesI Hereby Declare That The Project Entitled "DESIGN AND FABRICATION OF WORKINGGadadhar DeyNo ratings yet
- Abrasive Jet Machining: DefinitionDocument9 pagesAbrasive Jet Machining: Definition18R21A0310 BIYYALA SHESHAGIRINo ratings yet
- Ajm PDFDocument14 pagesAjm PDFvs.krishnakanthNo ratings yet
- Abrasive Jet MachiningDocument29 pagesAbrasive Jet MachiningSRIKANTH PATELNo ratings yet
- BM 1 - English - Presentation - Group 3 - AJM - PresentDocument11 pagesBM 1 - English - Presentation - Group 3 - AJM - PresenttaufiqwahyuNo ratings yet
- Design and F Abrication of Working Model of Abrasive Jet Mac HineDocument20 pagesDesign and F Abrication of Working Model of Abrasive Jet Mac HineAnuj TripathiNo ratings yet
- 1 - AJM Process PDFDocument11 pages1 - AJM Process PDFRaj VeerNo ratings yet
- Manufacturing TechnologyDocument63 pagesManufacturing Technologyvinothkumar hNo ratings yet
- Abrasive Jet MachiningDocument20 pagesAbrasive Jet Machiningsenthil kannan vNo ratings yet
- Water Jet MachiningDocument21 pagesWater Jet MachiningDarsh MenonNo ratings yet
- Abrasive Jet MachiningDocument2 pagesAbrasive Jet MachiningLokesh NarasimhaiahNo ratings yet
- Dept. of Aero & Auto, M.I.T, ManipalDocument138 pagesDept. of Aero & Auto, M.I.T, ManipalDpt HtegnNo ratings yet
- Non Conventional Machining MethodsDocument24 pagesNon Conventional Machining MethodsGaurav Nigam100% (1)
- Some Experimental Studies On Plasma Cutting Quality of LowDocument4 pagesSome Experimental Studies On Plasma Cutting Quality of LowNur FitriaNo ratings yet
- (PC Me 701)Document43 pages(PC Me 701)Suvodip MaityNo ratings yet
- Abrasive Jet MachiningDocument12 pagesAbrasive Jet MachiningTejas SuratiNo ratings yet
- Abrasive Jet Machining (AJM)Document31 pagesAbrasive Jet Machining (AJM)Abhishek KumarNo ratings yet
- AJM 1 - Process ParameterDocument4 pagesAJM 1 - Process ParameterDevendra SinghNo ratings yet
- Abrasive CuttingDocument7 pagesAbrasive CuttinggaborodcNo ratings yet
- Grinding and Polishing GuideDocument23 pagesGrinding and Polishing GuideICL EngineeringNo ratings yet
- Abrasive Jet MachiningDocument30 pagesAbrasive Jet MachiningMr PotatoNo ratings yet
- Ajm - 1st Lecture Chapter2Document16 pagesAjm - 1st Lecture Chapter2KAMALJEET SINGHNo ratings yet
- Thesis On Abrasive Jet MachiningDocument4 pagesThesis On Abrasive Jet Machiningfjcz1j5g100% (2)
- Abrasive Jet Machine - AbstractDocument6 pagesAbrasive Jet Machine - AbstractManju KbNo ratings yet
- Unit 1 - AMTDocument38 pagesUnit 1 - AMTLavishNo ratings yet
- Abrasive Jet Machining (AJM) : Dr. Venkaiah NDocument24 pagesAbrasive Jet Machining (AJM) : Dr. Venkaiah NAkshay ManiyarNo ratings yet
- Abrasive Jet MachiningDocument18 pagesAbrasive Jet Machiningkunal kumarNo ratings yet
- Harsh Me 3Document13 pagesHarsh Me 3Gajjar HarshNo ratings yet
- Abrasive Jet MachiningDocument11 pagesAbrasive Jet Machiningsoban singh negiNo ratings yet
- Advance Machining ProcessDocument201 pagesAdvance Machining ProcessAnmol SharmaNo ratings yet
- Metal Lo Graphic Sample Preparation - Cutting - Grinding - MountingDocument12 pagesMetal Lo Graphic Sample Preparation - Cutting - Grinding - Mountingrmarsh21730100% (2)
- Abrasive Jet Machining (AJM) : Unit 3Document54 pagesAbrasive Jet Machining (AJM) : Unit 3Satish SatiNo ratings yet
- Abrassive Jet Machining Main FileDocument34 pagesAbrassive Jet Machining Main FilearjunNo ratings yet
- Micro Machining Processes: Welcome To The Course ONDocument65 pagesMicro Machining Processes: Welcome To The Course ONAshit RajNo ratings yet
- HTL - 17-4-PH - Optimization of Machining Parameters in Turning 17-4 PH Stainless SteelDocument9 pagesHTL - 17-4-PH - Optimization of Machining Parameters in Turning 17-4 PH Stainless SteelSridhar AtlaNo ratings yet
- Design Planning Records Center of The Future 2004-10Document29 pagesDesign Planning Records Center of The Future 2004-10Talam KeladiNo ratings yet
- Datasheet LG-ICR18650D1 PDFDocument9 pagesDatasheet LG-ICR18650D1 PDFPedro Militao CoboNo ratings yet
- Panoramic Power Wireless Sensors Bridge DatasheetDocument1 pagePanoramic Power Wireless Sensors Bridge DatasheettiagoorgadoNo ratings yet
- Pompa Sirkulasi AP 156,3 LPM @60mDocument3 pagesPompa Sirkulasi AP 156,3 LPM @60mAndreas B KresnawanNo ratings yet
- Formal Language and Automata Theory (CS21004) : Soumyajit Dey CSE, IIT KharagpurDocument23 pagesFormal Language and Automata Theory (CS21004) : Soumyajit Dey CSE, IIT KharagpurManad MishraNo ratings yet
- PDF - SYLLABUS B2.new PDFDocument4 pagesPDF - SYLLABUS B2.new PDFSaniya khanNo ratings yet
- Sae: An R Package For Small Area EstimationDocument18 pagesSae: An R Package For Small Area EstimationGregorio AlbánNo ratings yet
- 00-Saip-06 Pressure TestDocument4 pages00-Saip-06 Pressure TestUzair AhmadNo ratings yet
- MDV D80T2VN1 Ba5 PDFDocument2 pagesMDV D80T2VN1 Ba5 PDFJuan Carlos Soto OrihuelaNo ratings yet
- TANCET Basic Engineering Maths 2013Document9 pagesTANCET Basic Engineering Maths 2013G. RajeshNo ratings yet
- 1632 - Pbt-Pet Valox 815Document5 pages1632 - Pbt-Pet Valox 815Vinoth SekarNo ratings yet
- 고압세척기 메뉴얼Document51 pages고압세척기 메뉴얼박일호No ratings yet
- Non Contact Voltage Testers and Personal Risk ManagementDocument12 pagesNon Contact Voltage Testers and Personal Risk ManagementPrasannaram IlangovanNo ratings yet
- Lathe DesignDocument11 pagesLathe DesignShiyas Basheer0% (1)
- 1SCC301021C0202 TC Otdc OtdcpDocument108 pages1SCC301021C0202 TC Otdc OtdcpLakshitha workNo ratings yet
- Bikas 2015Document17 pagesBikas 2015Clint TcNo ratings yet
- Ansul: Inergen 150 Bar SystemsDocument140 pagesAnsul: Inergen 150 Bar SystemsDaryl HeeralalNo ratings yet
- NPS Drilling Safety Induction Rev 1Document108 pagesNPS Drilling Safety Induction Rev 1Sameer Parambath100% (1)
- Ata 22Document19 pagesAta 22Henry BlandonNo ratings yet
- Corrosion Magazine Issue117 LowresDocument36 pagesCorrosion Magazine Issue117 Lowressaminasritn100% (2)
- Roofing Sheet MetalDocument15 pagesRoofing Sheet MetalKim AnneNo ratings yet
- Miyano Evolution Line: CNC Turning Center With 2 Spindles, 2 Turrets and 1 Y-Axis SlideDocument8 pagesMiyano Evolution Line: CNC Turning Center With 2 Spindles, 2 Turrets and 1 Y-Axis SlidealdiNo ratings yet
- Ultra Power Acb User ManualDocument138 pagesUltra Power Acb User ManualRaj KumarNo ratings yet
- STD DWG Ladder PDFDocument2 pagesSTD DWG Ladder PDFUrdian SyahNo ratings yet
- TVS Motor Company LTD: Part No. Application / Vehicle List Wheel MRP/Set Rs. PsDocument3 pagesTVS Motor Company LTD: Part No. Application / Vehicle List Wheel MRP/Set Rs. PssnehaashisNo ratings yet
- Ecc-559 Neutralizing AmineDocument5 pagesEcc-559 Neutralizing AmineU.s. Ezhil ArivudainambiNo ratings yet
- Firmware Update by Telnet v11.2Document7 pagesFirmware Update by Telnet v11.2adiskylineNo ratings yet
- 1948, E.R.Lapwood, Convection of A Fluid in A Porous Medium, Math. Pro. Cam. Phil. Soc.Document15 pages1948, E.R.Lapwood, Convection of A Fluid in A Porous Medium, Math. Pro. Cam. Phil. Soc.Prabal AcharyaNo ratings yet
- New Energy Technologies Issue 07Document79 pagesNew Energy Technologies Issue 07blameitontherain9877No ratings yet























































































Download as docx, pdf, or txt
You might also like
- Forces Acting On A PropellerDocument21 pagesForces Acting On A Propellercasandra joaquin100% (2)
- Weld Like a Pro: Beginning to Advanced TechniquesFrom EverandWeld Like a Pro: Beginning to Advanced TechniquesRating: 4.5 out of 5 stars4.5/5 (6)
- Design and Fabrications of Abrasive Jet Machine: Presented byDocument31 pagesDesign and Fabrications of Abrasive Jet Machine: Presented byAnuj TripathiNo ratings yet
- AJMDocument20 pagesAJMAkshay MuleNo ratings yet
- Unconventional Machining ProcessesDocument64 pagesUnconventional Machining Processesdeepak kantipudiNo ratings yet
- AjmDocument22 pagesAjmsuneel kumar rathoreNo ratings yet
- Abrasive Jet MachiningDocument9 pagesAbrasive Jet MachiningArko MazumderNo ratings yet
- Chapter2 - AJMDocument13 pagesChapter2 - AJMravish kumarNo ratings yet
- Abrasive Jet MachiningDocument8 pagesAbrasive Jet MachiningRanjith KaruturiNo ratings yet
- UCMP II UnitDocument59 pagesUCMP II Unit18R21A0310 BIYYALA SHESHAGIRINo ratings yet
- Persentasi B.inggris 2Document17 pagesPersentasi B.inggris 2Mustakim AnsoriNo ratings yet
- An Experimental Investigation On Abrasive Jet Machining by Erosion Abrasive GrainDocument3 pagesAn Experimental Investigation On Abrasive Jet Machining by Erosion Abrasive GrainPkNo ratings yet
- Influences of Natural Abrasives On Glass Cutting Process in Abrasive Jet MachineDocument9 pagesInfluences of Natural Abrasives On Glass Cutting Process in Abrasive Jet MachinePrasad PrinceNo ratings yet
- Abrasive Jet MachiningDocument12 pagesAbrasive Jet MachiningAnonymous N73Nk4RwsNo ratings yet
- Abrasive Jet Machining (AJM) : Material RemovalDocument23 pagesAbrasive Jet Machining (AJM) : Material RemovalHemanth Rama Krishna YernagulaNo ratings yet
- 4a AjmDocument13 pages4a AjmHARSHVARDHAN SINGH RATHORENo ratings yet
- Chapter2 - AJMDocument13 pagesChapter2 - AJMKurniawan ChaniagoNo ratings yet
- Abrasive Jet and Water Jet Machining Mp2Document50 pagesAbrasive Jet and Water Jet Machining Mp2Drew LadlowNo ratings yet
- Module-3: Advanced Material Removal Processes: Lecture No-3Document3 pagesModule-3: Advanced Material Removal Processes: Lecture No-3Abhishek TuliNo ratings yet
- Design and Fabrication of Abrasive Glass Cutting Machine Using Compressed AirDocument4 pagesDesign and Fabrication of Abrasive Glass Cutting Machine Using Compressed AirSujit SinghNo ratings yet
- Abrasive Jet Machining (Ajm) : Dept. of ME, ACEDocument8 pagesAbrasive Jet Machining (Ajm) : Dept. of ME, ACEJabir 08No ratings yet
- NMCOE4054ijarseDocument5 pagesNMCOE4054ijarseUsman AhmadNo ratings yet
- I Hereby Declare That The Project Entitled "DESIGN AND FABRICATION OF WORKINGDocument29 pagesI Hereby Declare That The Project Entitled "DESIGN AND FABRICATION OF WORKINGGadadhar DeyNo ratings yet
- Abrasive Jet Machining: DefinitionDocument9 pagesAbrasive Jet Machining: Definition18R21A0310 BIYYALA SHESHAGIRINo ratings yet
- Ajm PDFDocument14 pagesAjm PDFvs.krishnakanthNo ratings yet
- Abrasive Jet MachiningDocument29 pagesAbrasive Jet MachiningSRIKANTH PATELNo ratings yet
- BM 1 - English - Presentation - Group 3 - AJM - PresentDocument11 pagesBM 1 - English - Presentation - Group 3 - AJM - PresenttaufiqwahyuNo ratings yet
- Design and F Abrication of Working Model of Abrasive Jet Mac HineDocument20 pagesDesign and F Abrication of Working Model of Abrasive Jet Mac HineAnuj TripathiNo ratings yet
- 1 - AJM Process PDFDocument11 pages1 - AJM Process PDFRaj VeerNo ratings yet
- Manufacturing TechnologyDocument63 pagesManufacturing Technologyvinothkumar hNo ratings yet
- Abrasive Jet MachiningDocument20 pagesAbrasive Jet Machiningsenthil kannan vNo ratings yet
- Water Jet MachiningDocument21 pagesWater Jet MachiningDarsh MenonNo ratings yet
- Abrasive Jet MachiningDocument2 pagesAbrasive Jet MachiningLokesh NarasimhaiahNo ratings yet
- Dept. of Aero & Auto, M.I.T, ManipalDocument138 pagesDept. of Aero & Auto, M.I.T, ManipalDpt HtegnNo ratings yet
- Non Conventional Machining MethodsDocument24 pagesNon Conventional Machining MethodsGaurav Nigam100% (1)
- Some Experimental Studies On Plasma Cutting Quality of LowDocument4 pagesSome Experimental Studies On Plasma Cutting Quality of LowNur FitriaNo ratings yet
- (PC Me 701)Document43 pages(PC Me 701)Suvodip MaityNo ratings yet
- Abrasive Jet MachiningDocument12 pagesAbrasive Jet MachiningTejas SuratiNo ratings yet
- Abrasive Jet Machining (AJM)Document31 pagesAbrasive Jet Machining (AJM)Abhishek KumarNo ratings yet
- AJM 1 - Process ParameterDocument4 pagesAJM 1 - Process ParameterDevendra SinghNo ratings yet
- Abrasive CuttingDocument7 pagesAbrasive CuttinggaborodcNo ratings yet
- Grinding and Polishing GuideDocument23 pagesGrinding and Polishing GuideICL EngineeringNo ratings yet
- Abrasive Jet MachiningDocument30 pagesAbrasive Jet MachiningMr PotatoNo ratings yet
- Ajm - 1st Lecture Chapter2Document16 pagesAjm - 1st Lecture Chapter2KAMALJEET SINGHNo ratings yet
- Thesis On Abrasive Jet MachiningDocument4 pagesThesis On Abrasive Jet Machiningfjcz1j5g100% (2)
- Abrasive Jet Machine - AbstractDocument6 pagesAbrasive Jet Machine - AbstractManju KbNo ratings yet
- Unit 1 - AMTDocument38 pagesUnit 1 - AMTLavishNo ratings yet
- Abrasive Jet Machining (AJM) : Dr. Venkaiah NDocument24 pagesAbrasive Jet Machining (AJM) : Dr. Venkaiah NAkshay ManiyarNo ratings yet
- Abrasive Jet MachiningDocument18 pagesAbrasive Jet Machiningkunal kumarNo ratings yet
- Harsh Me 3Document13 pagesHarsh Me 3Gajjar HarshNo ratings yet
- Abrasive Jet MachiningDocument11 pagesAbrasive Jet Machiningsoban singh negiNo ratings yet
- Advance Machining ProcessDocument201 pagesAdvance Machining ProcessAnmol SharmaNo ratings yet
- Metal Lo Graphic Sample Preparation - Cutting - Grinding - MountingDocument12 pagesMetal Lo Graphic Sample Preparation - Cutting - Grinding - Mountingrmarsh21730100% (2)
- Abrasive Jet Machining (AJM) : Unit 3Document54 pagesAbrasive Jet Machining (AJM) : Unit 3Satish SatiNo ratings yet
- Abrassive Jet Machining Main FileDocument34 pagesAbrassive Jet Machining Main FilearjunNo ratings yet
- Micro Machining Processes: Welcome To The Course ONDocument65 pagesMicro Machining Processes: Welcome To The Course ONAshit RajNo ratings yet
- HTL - 17-4-PH - Optimization of Machining Parameters in Turning 17-4 PH Stainless SteelDocument9 pagesHTL - 17-4-PH - Optimization of Machining Parameters in Turning 17-4 PH Stainless SteelSridhar AtlaNo ratings yet
- Design Planning Records Center of The Future 2004-10Document29 pagesDesign Planning Records Center of The Future 2004-10Talam KeladiNo ratings yet
- Datasheet LG-ICR18650D1 PDFDocument9 pagesDatasheet LG-ICR18650D1 PDFPedro Militao CoboNo ratings yet
- Panoramic Power Wireless Sensors Bridge DatasheetDocument1 pagePanoramic Power Wireless Sensors Bridge DatasheettiagoorgadoNo ratings yet
- Pompa Sirkulasi AP 156,3 LPM @60mDocument3 pagesPompa Sirkulasi AP 156,3 LPM @60mAndreas B KresnawanNo ratings yet
- Formal Language and Automata Theory (CS21004) : Soumyajit Dey CSE, IIT KharagpurDocument23 pagesFormal Language and Automata Theory (CS21004) : Soumyajit Dey CSE, IIT KharagpurManad MishraNo ratings yet
- PDF - SYLLABUS B2.new PDFDocument4 pagesPDF - SYLLABUS B2.new PDFSaniya khanNo ratings yet
- Sae: An R Package For Small Area EstimationDocument18 pagesSae: An R Package For Small Area EstimationGregorio AlbánNo ratings yet
- 00-Saip-06 Pressure TestDocument4 pages00-Saip-06 Pressure TestUzair AhmadNo ratings yet
- MDV D80T2VN1 Ba5 PDFDocument2 pagesMDV D80T2VN1 Ba5 PDFJuan Carlos Soto OrihuelaNo ratings yet
- TANCET Basic Engineering Maths 2013Document9 pagesTANCET Basic Engineering Maths 2013G. RajeshNo ratings yet
- 1632 - Pbt-Pet Valox 815Document5 pages1632 - Pbt-Pet Valox 815Vinoth SekarNo ratings yet
- 고압세척기 메뉴얼Document51 pages고압세척기 메뉴얼박일호No ratings yet
- Non Contact Voltage Testers and Personal Risk ManagementDocument12 pagesNon Contact Voltage Testers and Personal Risk ManagementPrasannaram IlangovanNo ratings yet
- Lathe DesignDocument11 pagesLathe DesignShiyas Basheer0% (1)
- 1SCC301021C0202 TC Otdc OtdcpDocument108 pages1SCC301021C0202 TC Otdc OtdcpLakshitha workNo ratings yet
- Bikas 2015Document17 pagesBikas 2015Clint TcNo ratings yet
- Ansul: Inergen 150 Bar SystemsDocument140 pagesAnsul: Inergen 150 Bar SystemsDaryl HeeralalNo ratings yet
- NPS Drilling Safety Induction Rev 1Document108 pagesNPS Drilling Safety Induction Rev 1Sameer Parambath100% (1)
- Ata 22Document19 pagesAta 22Henry BlandonNo ratings yet
- Corrosion Magazine Issue117 LowresDocument36 pagesCorrosion Magazine Issue117 Lowressaminasritn100% (2)
- Roofing Sheet MetalDocument15 pagesRoofing Sheet MetalKim AnneNo ratings yet
- Miyano Evolution Line: CNC Turning Center With 2 Spindles, 2 Turrets and 1 Y-Axis SlideDocument8 pagesMiyano Evolution Line: CNC Turning Center With 2 Spindles, 2 Turrets and 1 Y-Axis SlidealdiNo ratings yet
- Ultra Power Acb User ManualDocument138 pagesUltra Power Acb User ManualRaj KumarNo ratings yet
- STD DWG Ladder PDFDocument2 pagesSTD DWG Ladder PDFUrdian SyahNo ratings yet
- TVS Motor Company LTD: Part No. Application / Vehicle List Wheel MRP/Set Rs. PsDocument3 pagesTVS Motor Company LTD: Part No. Application / Vehicle List Wheel MRP/Set Rs. PssnehaashisNo ratings yet
- Ecc-559 Neutralizing AmineDocument5 pagesEcc-559 Neutralizing AmineU.s. Ezhil ArivudainambiNo ratings yet
- Firmware Update by Telnet v11.2Document7 pagesFirmware Update by Telnet v11.2adiskylineNo ratings yet
- 1948, E.R.Lapwood, Convection of A Fluid in A Porous Medium, Math. Pro. Cam. Phil. Soc.Document15 pages1948, E.R.Lapwood, Convection of A Fluid in A Porous Medium, Math. Pro. Cam. Phil. Soc.Prabal AcharyaNo ratings yet
- New Energy Technologies Issue 07Document79 pagesNew Energy Technologies Issue 07blameitontherain9877No ratings yet