Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Instructor Guide AcDc MotorsDocument388 pagesInstructor Guide AcDc MotorsMazoon ButtNo ratings yet
- SL No. PM System Fault Reclosure r1 r2 Faultpos DelcritDocument2 pagesSL No. PM System Fault Reclosure r1 r2 Faultpos DelcritSoumya DasNo ratings yet
- Transactions Instructions Rev 9bDocument4 pagesTransactions Instructions Rev 9bSoumya DasNo ratings yet
- Bicycle Touring Photography GuideDocument52 pagesBicycle Touring Photography GuideSoumya Das100% (1)
- Practical Photography - Take Better Travel PhotosDocument22 pagesPractical Photography - Take Better Travel PhotosunardeleanNo ratings yet
- 2013 Advt. 2Document2 pages2013 Advt. 2Soumya DasNo ratings yet
- TCR-TSC Lookup TableDocument8 pagesTCR-TSC Lookup TableSoumya DasNo ratings yet
- Mitesd 934s10 Lec 14bDocument17 pagesMitesd 934s10 Lec 14bSoumya DasNo ratings yet
- Indian School of Mines DhanbadDocument12 pagesIndian School of Mines DhanbadSoumya DasNo ratings yet
- ABB - Distance Relay REL511-C1-Application Manual (With Parallel Line Compensation Derivation)Document364 pagesABB - Distance Relay REL511-C1-Application Manual (With Parallel Line Compensation Derivation)govindarul100% (1)
- DSE ControlSystemDSE7000 QRFDocument21 pagesDSE ControlSystemDSE7000 QRFaldrine dela cruzNo ratings yet
- FMP 221 Lecture 10 and 11Document44 pagesFMP 221 Lecture 10 and 11SarojKumarSinghNo ratings yet
- Stamford-Uci 27 4FDocument9 pagesStamford-Uci 27 4FKevin GuoNo ratings yet
- How To Build A 12 VDC To 220 VAC Power Inverter (UPS)Document14 pagesHow To Build A 12 VDC To 220 VAC Power Inverter (UPS)morfy seasNo ratings yet
- Power Management SystemDocument21 pagesPower Management Systemtharta671No ratings yet
- Traction Motor Type Tm4907Bz: Technical DataDocument12 pagesTraction Motor Type Tm4907Bz: Technical DataPratibha Patel100% (1)
- Understanding Shaft Voltage and Grounding Currents of Turbine GeneratorsDocument12 pagesUnderstanding Shaft Voltage and Grounding Currents of Turbine GeneratorsJose PradoNo ratings yet
- JEE (MAIN) - 2016 (Physics, Chemistry and Mathematics) Code - EDocument26 pagesJEE (MAIN) - 2016 (Physics, Chemistry and Mathematics) Code - ESiddhant TiwariNo ratings yet
- Electrical Interview Questions AnswersDocument17 pagesElectrical Interview Questions AnswersSagar Yera91% (11)
- Grounding Port GeneratorDocument2 pagesGrounding Port Generatorammarmoiz100% (1)
- Generator Automatic Voltage Regulator Operation ManualDocument5 pagesGenerator Automatic Voltage Regulator Operation ManualIBRAHIM AL-SURAIHINo ratings yet
- ABB Motors and Generators Technical Data Sheet - DOL: No. Data Unit RemarksDocument9 pagesABB Motors and Generators Technical Data Sheet - DOL: No. Data Unit RemarksArgenis UlloaNo ratings yet
- Ge PresentationDocument23 pagesGe PresentationNemezis1987No ratings yet
- PPM-3 Data Sheet 4921240392 UK - 2012.06.15Document27 pagesPPM-3 Data Sheet 4921240392 UK - 2012.06.15Jon LopezNo ratings yet
- Module 02 Generator and Transformer Models - With NotesDocument39 pagesModule 02 Generator and Transformer Models - With NotesAntonNo ratings yet
- Grid Code For PakistanDocument22 pagesGrid Code For PakistanHafeez Khan TareenNo ratings yet
- Installation and Troubleshooting Manual: EPG Electrically Powered GovernorDocument22 pagesInstallation and Troubleshooting Manual: EPG Electrically Powered GovernorVishal gautamNo ratings yet
- Generator BasicsDocument64 pagesGenerator BasicsMohammad Ivan HariyantoNo ratings yet
- Evaluation of KPP Technology Developed by Rosch InnovationsDocument18 pagesEvaluation of KPP Technology Developed by Rosch InnovationsAtech Srls atechnology euNo ratings yet
- TM 5-1202 SCRAPER LeTOURNEAU MDL SUPER C TOURNAPULL WITH MDL LP CARRYALL LeTOURNEAU, 1944Document572 pagesTM 5-1202 SCRAPER LeTOURNEAU MDL SUPER C TOURNAPULL WITH MDL LP CARRYALL LeTOURNEAU, 1944Advocate100% (1)
- Applications of LEMTransducers PDFDocument32 pagesApplications of LEMTransducers PDFStephen BridgesNo ratings yet
- Ram Sons Viet MachinesDocument38 pagesRam Sons Viet MachinesDeepanNo ratings yet
- ABB RPG PresentationDocument36 pagesABB RPG Presentationsandeep88n0% (1)
- Turbin at orDocument4 pagesTurbin at orJosé GuerraNo ratings yet
- Names of Companies in Power IndustryDocument14 pagesNames of Companies in Power IndustrygulmuhrNo ratings yet
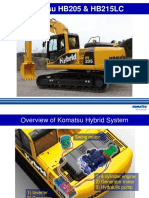
- Komatsu Hybrid Nat Niqa Nov 2011Document14 pagesKomatsu Hybrid Nat Niqa Nov 2011Avaa Amgaa100% (3)
- Acme3-M - Ac Machinery FundamentalsDocument12 pagesAcme3-M - Ac Machinery FundamentalsRavin SolNo ratings yet
- Model AC550: Power Pf. 0.8 StandbyDocument4 pagesModel AC550: Power Pf. 0.8 StandbymdpolashNo ratings yet
- Company Profile SixAB 2021Document16 pagesCompany Profile SixAB 2021Nanda AdityaNo ratings yet