Download as rtf, pdf, or txt
You might also like
- K1921. Quiz On 3DDocument6 pagesK1921. Quiz On 3DmmiyuNo ratings yet
- Solution: A 160 200 B 300 C 100 D 140 E 160Document2 pagesSolution: A 160 200 B 300 C 100 D 140 E 160A.Kh.SNo ratings yet
- MDB Quiz 1 (Moratal 3 - B)Document8 pagesMDB Quiz 1 (Moratal 3 - B)Axel Naome Zyrah MoratalNo ratings yet
- Chap07 ShaftsDocument8 pagesChap07 ShaftsFatih AŞCINo ratings yet
- Panel Task 1Document202 pagesPanel Task 1Kaan BilenNo ratings yet
- Báo Giá Linh Ki N Và PCB: Item PCB - Components Nums Unit Price CashDocument1 pageBáo Giá Linh Ki N Và PCB: Item PCB - Components Nums Unit Price CashTrần Huy HoàngNo ratings yet
- Ejercicios de Armaduras 3D - Fiestas Rumiche Anthony MiguelDocument29 pagesEjercicios de Armaduras 3D - Fiestas Rumiche Anthony MiguelafiestasrNo ratings yet
- MC CB 25A: Panel Reference: Fed From: Location: Floor: Number of Ways: Quantity: Circuit Breaker Point ReferenceDocument8 pagesMC CB 25A: Panel Reference: Fed From: Location: Floor: Number of Ways: Quantity: Circuit Breaker Point ReferenceHamdi DiiabNo ratings yet
- Highe Series: Siov Metal Oxide VaristorsDocument60 pagesHighe Series: Siov Metal Oxide VaristorsDanna PerezNo ratings yet
- Links StaticsDocument3 pagesLinks StaticskfransaliNo ratings yet
- Tri Late RationDocument13 pagesTri Late RationKrishna PrakashNo ratings yet
- Roomside Calculation SheetDocument7 pagesRoomside Calculation Sheetsunii19847908No ratings yet
- Total Result 2253 11265Document52 pagesTotal Result 2253 11265Ahmat RamadaniNo ratings yet
- Shape FactorsDocument19 pagesShape FactorsBishwombhar Pandit (Joker)No ratings yet
- Bohler: Grade C H e M I C A L Composition (Average Values, O/o)Document1 pageBohler: Grade C H e M I C A L Composition (Average Values, O/o)jajodia239No ratings yet
- PartlistDocument2 pagesPartlistsudhiruday31No ratings yet
- Spreadsheets To BS 8110Document12 pagesSpreadsheets To BS 8110aloke2mondalNo ratings yet
- EMC Filters: Series/Type: B84111ADocument10 pagesEMC Filters: Series/Type: B84111ALuisNo ratings yet
- DatasheetDocument13 pagesDatasheetBalaji PotnuriNo ratings yet
- Master Input PDI Juli 2015 2Document209 pagesMaster Input PDI Juli 2015 2FajriRamadhanNo ratings yet
- Mutation ProductsDocument123 pagesMutation ProductsKikin KusumahNo ratings yet
- Close Conduit Hydraulics RESIT MGDocument6 pagesClose Conduit Hydraulics RESIT MGChu DicksonNo ratings yet
- Development Length TablesDocument1 pageDevelopment Length TablesOsama AnwarNo ratings yet
- Tikungan SicincinDocument19 pagesTikungan Sicincinyudi hidayatNo ratings yet
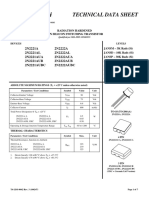
- Technical Data Sheet: 2N2221A 2N2222A 2N2221AL 2N2222AL 2N2221AUA 2N2222AUA 2N2221AUB 2N2222AUB 2N2221AUBC 2N2222AUBCDocument7 pagesTechnical Data Sheet: 2N2221A 2N2222A 2N2221AL 2N2222AL 2N2221AUA 2N2222AUA 2N2221AUB 2N2222AUB 2N2221AUBC 2N2222AUBCanon_829340169No ratings yet
- Problems With FEM Solution: Heat TransferDocument34 pagesProblems With FEM Solution: Heat Transfermailsk123No ratings yet
- MCCB Ls 2019 Faktor Kali 1,1 - 24% + PPN Apels 2021 04 06Document44 pagesMCCB Ls 2019 Faktor Kali 1,1 - 24% + PPN Apels 2021 04 06Catur FirmansyahNo ratings yet
- Planilla de Circuitos Y Equilibreo de Carga: Carga Conductores Caida ProteccionDocument6 pagesPlanilla de Circuitos Y Equilibreo de Carga: Carga Conductores Caida ProteccionGabrielNo ratings yet
- Solar PowerDocument1 pageSolar PowerHoney Jane RamosNo ratings yet
- Bipolar RussianDocument8 pagesBipolar RussianBill CheimarasNo ratings yet
- FDDSFDocument8 pagesFDDSFLUis PEpeNo ratings yet
- Bipolar RussianDocument8 pagesBipolar RussianBill CheimarasNo ratings yet
- Orosz-Ussr Russian Semiconductor Cross-ReferenceDocument8 pagesOrosz-Ussr Russian Semiconductor Cross-ReferenceNikolett GyalogNo ratings yet
- Đường Cong Tốc Độ SấyDocument5 pagesĐường Cong Tốc Độ SấyNguyen SyNo ratings yet
- 3.vencher BeeramgudaDocument3 pages3.vencher BeeramgudaKumaraswamyNo ratings yet
- ATSeries30 I&O 1108Document100 pagesATSeries30 I&O 1108NoorAhmadNo ratings yet
- 7 Lateral Torsional BucklingDocument15 pages7 Lateral Torsional BucklingDem Austria EspinoNo ratings yet
- VCSDocument5 pagesVCSAnandharaj KrishnamoorthyNo ratings yet
- BC850CDocument9 pagesBC850CIrwantoirwanNo ratings yet
- Q62702-C1741-Siemens Semiconductor Group PDFDocument8 pagesQ62702-C1741-Siemens Semiconductor Group PDFPablo AllosiaNo ratings yet
- BCX70J AJs BTSDocument9 pagesBCX70J AJs BTSidnuejdbflxmynpkrnNo ratings yet
- Cola B: ColarDocument5 pagesCola B: ColarWalter Salluca CallaNo ratings yet
- Transvers Analysis 119iDocument22 pagesTransvers Analysis 119iruchitaNo ratings yet
- NPN Silicon Epitaxial Planar Transistor 2PD601AW: Galaxy ElectricalDocument4 pagesNPN Silicon Epitaxial Planar Transistor 2PD601AW: Galaxy ElectricalГеннадий БабенкоNo ratings yet
- Electrical Calculator EngineeringDocument16 pagesElectrical Calculator Engineeringfuziadithia188No ratings yet
- Acb / MCCB / Elcb / Ats MCB / SPD / Ms / MMS: DistributorDocument56 pagesAcb / MCCB / Elcb / Ats MCB / SPD / Ms / MMS: DistributorLUATNo ratings yet
- Mekanika Rekayasa Iv: Metode Hardy CrossDocument9 pagesMekanika Rekayasa Iv: Metode Hardy CrossTingkos HutabaratNo ratings yet
- BH-D6 BH-D10 BH-DN: Rated Short-Circuit Capacity (Ka)Document2 pagesBH-D6 BH-D10 BH-DN: Rated Short-Circuit Capacity (Ka)JV BalisiNo ratings yet
- Bogra AIS-Cable PODocument6 pagesBogra AIS-Cable POSayful IslamNo ratings yet
- BL SeriesDocument5 pagesBL SeriesMie Hijau Tanpa PengawetNo ratings yet
- Schedule-Of-Loads RURU01Document91 pagesSchedule-Of-Loads RURU01Rumark DumapiasNo ratings yet
- General Purpose Transistor NPN Silicon: M Aximum R AtingsDocument4 pagesGeneral Purpose Transistor NPN Silicon: M Aximum R AtingsTahar BenacherineNo ratings yet
- Problems With FEM Solution: Heat TransferDocument34 pagesProblems With FEM Solution: Heat TransferrajuNo ratings yet
- XEL - Schneider Price List PDFDocument7 pagesXEL - Schneider Price List PDFমোঃ মোমিনুল ইসলাম শোভন100% (1)
- Engineering Mechanics: 3D EquilibriumDocument37 pagesEngineering Mechanics: 3D EquilibriumSrinivas ShareNo ratings yet
- 贴片元件ADocument7 pages贴片元件A滕鼎No ratings yet
- Load Schedule AluminiumDocument125 pagesLoad Schedule AluminiumGireeshNo ratings yet
- Type A Tower-2 4th Floor Beam BBSDocument24 pagesType A Tower-2 4th Floor Beam BBSsandeep1995kasettyNo ratings yet
- Jhajjar KT Transco PVT LTD Lux Measurement in 400/220/132KV Substation Kabulpur, RohtakDocument4 pagesJhajjar KT Transco PVT LTD Lux Measurement in 400/220/132KV Substation Kabulpur, RohtakAbhishek KukrejaNo ratings yet