
MECH466: Automatic Control Course Roadmap
MECH466: Automatic Control Course Roadmap
You might also like
- System Dynamics An Introduction, Derek RowellDocument8 pagesSystem Dynamics An Introduction, Derek RowellDavid Abraham Jiménez MartínezNo ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451 L15 Timeresp2nd 240116 183552Document6 pagesME451 L15 Timeresp2nd 240116 183552epe3630No ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451 L14 TimeResp1st 240116 183517Document4 pagesME451 L14 TimeResp1st 240116 183517epe3630No ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Bab 0 Pendahuluan SKODocument8 pagesBab 0 Pendahuluan SKOSiapaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- AC Sweep Webinar August 13 2020Document19 pagesAC Sweep Webinar August 13 2020Hugo Roberto Junior Gutierrez ValentinNo ratings yet
- Crash Course On Control: Karl-Erik ÅrzénDocument113 pagesCrash Course On Control: Karl-Erik ÅrzénswatkoolNo ratings yet
- L5 Show FeedforwardDocument35 pagesL5 Show FeedforwardJulián RodríguezNo ratings yet
- Vibration AssessmentDocument50 pagesVibration AssessmentPooria SoroushNo ratings yet
- Vishwakarma Institute of Technology: Issue 01: Rev No. 0: Dt. 16/03/16 Course Plan FormatDocument5 pagesVishwakarma Institute of Technology: Issue 01: Rev No. 0: Dt. 16/03/16 Course Plan FormatjdaudpotoNo ratings yet
- Nptel: Control Engineering - Video CourseDocument1 pageNptel: Control Engineering - Video CourseHarshNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Transient Stability 2Document15 pagesTransient Stability 2yonoka aldinugraha100% (1)
- Motion & Automation Motion & Automation ME 4176: ContactDocument26 pagesMotion & Automation Motion & Automation ME 4176: ContactHien NguyenNo ratings yet
- Control Systems (9171)Document5 pagesControl Systems (9171)Victoria Franco0% (1)
- ME L20 RootLocusLeadDocument6 pagesME L20 RootLocusLeadRezkodaNo ratings yet
- Calculation Modules Power-Flow Analysis Fault Analysis Dynamic Analysis o o oDocument11 pagesCalculation Modules Power-Flow Analysis Fault Analysis Dynamic Analysis o o oAshish MishraNo ratings yet
- Control Engineering II: Thanh T. Tran, PH.D.Document36 pagesControl Engineering II: Thanh T. Tran, PH.D.Thiên BùiNo ratings yet
- Ds Msc-Nastran-Dynamics LTR WDocument2 pagesDs Msc-Nastran-Dynamics LTR WAydinNo ratings yet
- DC Motor Case Study PDFDocument29 pagesDC Motor Case Study PDFliling100% (1)
- Sistem Kendali: Teknik MesinDocument36 pagesSistem Kendali: Teknik MesinSugeng HariyantoNo ratings yet
- Mechatronics DC Motor - Tachometer Closed-Loop Speed Control SystemDocument29 pagesMechatronics DC Motor - Tachometer Closed-Loop Speed Control SystemskheoNo ratings yet
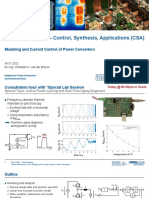
- 2022 01 06 LECTURE 9 ModelingAndCurrentControlDocument62 pages2022 01 06 LECTURE 9 ModelingAndCurrentControlYves DuforezNo ratings yet
- Switch Gear and ProtectionDocument15 pagesSwitch Gear and ProtectionLaxmiKrishnaNo ratings yet
- 4-Principles Adaptive ControlDocument7 pages4-Principles Adaptive ControlSamuel BrandNo ratings yet
- 07 Automatic Generation ControlDocument9 pages07 Automatic Generation Control- FBANo ratings yet
- A Midterm Thesis Presentation On: Effects of Higher Modes On Capacity Curve and Hinge Formation"Document21 pagesA Midterm Thesis Presentation On: Effects of Higher Modes On Capacity Curve and Hinge Formation"Suman TiwariNo ratings yet
- Lecture1 F23Document29 pagesLecture1 F23201151No ratings yet
- Lecture - Week 01 (DBK)Document41 pagesLecture - Week 01 (DBK)Мцндммдԁ ДӡдиNo ratings yet
- Unit 5Document24 pagesUnit 5RiteshNo ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Dynamic Testing TechniquesDocument54 pagesDynamic Testing TechniquesLuis Montoya100% (1)
- Ec ControlDocument335 pagesEc ControladammathewsNo ratings yet
- Micom P241 Motor Management RelayDocument12 pagesMicom P241 Motor Management Relaydave chaudhuryNo ratings yet
- BEKC 3533 Introduction To Control SystemDocument1 pageBEKC 3533 Introduction To Control SystemMike PosktovaNo ratings yet
- Article Choosing Right Communication Protocol Fisher en 178770Document8 pagesArticle Choosing Right Communication Protocol Fisher en 178770Adnan SalihbegovicNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- 2A.I - Panel 1 - Hariram Subramanian - HuaweiDocument2 pages2A.I - Panel 1 - Hariram Subramanian - HuaweiMNo ratings yet
- 3 Ways To Speed Up Model Predictive ControllersDocument26 pages3 Ways To Speed Up Model Predictive ControllersHamzehNo ratings yet
- Course Code: EE303 Linear Control Systems 2-1-0-3 2016 Prerequisite: NilDocument2 pagesCourse Code: EE303 Linear Control Systems 2-1-0-3 2016 Prerequisite: NilSUNOBHAINo ratings yet
- Introduction To Dynamic System Modeling and AnalysisDocument28 pagesIntroduction To Dynamic System Modeling and AnalysisHasan AmerNo ratings yet
- Instrumentation and ControlDocument2 pagesInstrumentation and ControlKrista JacksonNo ratings yet
- Model Predictive ControlDocument49 pagesModel Predictive ControlMaximo Plata LeyNo ratings yet
- English TutorialDocument145 pagesEnglish Tutorialkrunal tripathiNo ratings yet
- Advanced Automatic ControlDocument26 pagesAdvanced Automatic Controlabdullah 3mar abou reashaNo ratings yet
- Ge Lightspeed CT Systems Maintenance (Phase Iii) : Day 2 Lab ActivitiesDocument3 pagesGe Lightspeed CT Systems Maintenance (Phase Iii) : Day 2 Lab ActivitiesMai Thanh SơnNo ratings yet
- Lecture-5 - Classification of Process Variables - Control StrategiesDocument18 pagesLecture-5 - Classification of Process Variables - Control StrategiesKshitij SoniNo ratings yet
- Lecture-6 - Control Stratefgies-Steps in Design of Control SystemDocument24 pagesLecture-6 - Control Stratefgies-Steps in Design of Control SystemKshitij SoniNo ratings yet
- EE016 - Effect of Fault Location On Transient StabilityDocument4 pagesEE016 - Effect of Fault Location On Transient StabilitybhavikNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Ch.03 Modeling in Time DomainDocument11 pagesCh.03 Modeling in Time DomainĐỗ Thiện HiệpNo ratings yet
- Automation and Control Engineering (R17A0327) : 4 Year B. Tech I-Sem, Mechanical EngineeringDocument20 pagesAutomation and Control Engineering (R17A0327) : 4 Year B. Tech I-Sem, Mechanical EngineeringJEYAVEL PALANISAMYNo ratings yet
- Study On Maneuvering of A Large Tanker in Still Water and Adverse Weather ConditionsDocument143 pagesStudy On Maneuvering of A Large Tanker in Still Water and Adverse Weather ConditionsMohamed MohamedNo ratings yet
- 27117 論文Document158 pages27117 論文Mohamed MohamedNo ratings yet
- MARLOG12 Full PaperTemplateEnglish Ver 1 DecDocument5 pagesMARLOG12 Full PaperTemplateEnglish Ver 1 DecMohamed MohamedNo ratings yet
- Structural Design of 3-Axis CNC Machine Tool For Wood CarvingDocument100 pagesStructural Design of 3-Axis CNC Machine Tool For Wood CarvingMohamed MohamedNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityLAKHA ASGARALI ANWARNo ratings yet
- DEIEDocument112 pagesDEIESuri AkulNo ratings yet
- FCS Lab2Document36 pagesFCS Lab2muhammadNo ratings yet
- Btech EE 2015Document71 pagesBtech EE 2015Suyash NathNo ratings yet
- MathematicsCourses For B.TechMTech PDFDocument29 pagesMathematicsCourses For B.TechMTech PDFSanket MathurNo ratings yet
- Ordinary Differential Equations Multiple Choice Questions and Answers - SanfoundryDocument7 pagesOrdinary Differential Equations Multiple Choice Questions and Answers - SanfoundrySaiman PervaizNo ratings yet
- Renewable Energy: J. Buzás, R. KicsinyDocument10 pagesRenewable Energy: J. Buzás, R. KicsinygtchsekharNo ratings yet
- B.SC MathematicsDocument37 pagesB.SC MathematicsMarikannan GNo ratings yet
- Mathematics IDocument247 pagesMathematics IShreya PankajNo ratings yet
- Lec04 - Laplace and Z-TransformDocument50 pagesLec04 - Laplace and Z-TransformRehman SaleemNo ratings yet
- Non Homogeneous Linear SystemsDocument18 pagesNon Homogeneous Linear Systemsd1ucpmq+lny4lsNo ratings yet
- Z TransformDocument28 pagesZ TransformgptkoushikNo ratings yet
- Laplace TransformDocument13 pagesLaplace Transformh6j4vsNo ratings yet
- Slug Test - Rad1Document14 pagesSlug Test - Rad1Hata MilišicNo ratings yet
- Chapter 15 Circuit Analysis in The S-Domaun-1Document36 pagesChapter 15 Circuit Analysis in The S-Domaun-1umerNo ratings yet
- 03 - The Laplace TransformDocument54 pages03 - The Laplace TransformHandi RizkinugrahaNo ratings yet
- MA21/MAT201: RamaiahDocument3 pagesMA21/MAT201: RamaiahTsukasa EishiNo ratings yet
- EC2204QBDocument16 pagesEC2204QBSridhar RamanNo ratings yet
- Laplace Transform PDFDocument13 pagesLaplace Transform PDFPrateekBansalNo ratings yet
- Kappa Dda Book, Feb 2011Document505 pagesKappa Dda Book, Feb 2011Gabriel ColmontNo ratings yet
- Laplace Transforms1Document81 pagesLaplace Transforms1arunkumar SNo ratings yet
- Notes 02 - First Order SystemsDocument2 pagesNotes 02 - First Order SystemsMan JaNo ratings yet
- Swami Ramanand Teerth Marathwada University, Nanded (M.S.) - B.A./B.Sc. Third Year Syllabus (Mathematics) Effective From June - 2015Document11 pagesSwami Ramanand Teerth Marathwada University, Nanded (M.S.) - B.A./B.Sc. Third Year Syllabus (Mathematics) Effective From June - 2015smpopadeNo ratings yet
- Process Dynamics: Modeling, Analysis, and SimulationDocument632 pagesProcess Dynamics: Modeling, Analysis, and SimulationPablo Albert Quispe CapquiqueNo ratings yet
- HD MechDocument62 pagesHD MechSani UnanNo ratings yet
- Soil M PDFDocument24 pagesSoil M PDFsabari nivashNo ratings yet
- Signals and Systems With Matlab (Steven T. Karris)Document36 pagesSignals and Systems With Matlab (Steven T. Karris)Andre RodriguesNo ratings yet
- J.C. Bose University of Science and Technology, Ymca, FaridabadDocument18 pagesJ.C. Bose University of Science and Technology, Ymca, FaridabadSumit MeghNo ratings yet
- Important QuestionsDocument4 pagesImportant QuestionsLatheefNo ratings yet


























































































Download as pdf or txt
You might also like
- System Dynamics An Introduction, Derek RowellDocument8 pagesSystem Dynamics An Introduction, Derek RowellDavid Abraham Jiménez MartínezNo ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451 L15 Timeresp2nd 240116 183552Document6 pagesME451 L15 Timeresp2nd 240116 183552epe3630No ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451 L14 TimeResp1st 240116 183517Document4 pagesME451 L14 TimeResp1st 240116 183517epe3630No ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Bab 0 Pendahuluan SKODocument8 pagesBab 0 Pendahuluan SKOSiapaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- AC Sweep Webinar August 13 2020Document19 pagesAC Sweep Webinar August 13 2020Hugo Roberto Junior Gutierrez ValentinNo ratings yet
- Crash Course On Control: Karl-Erik ÅrzénDocument113 pagesCrash Course On Control: Karl-Erik ÅrzénswatkoolNo ratings yet
- L5 Show FeedforwardDocument35 pagesL5 Show FeedforwardJulián RodríguezNo ratings yet
- Vibration AssessmentDocument50 pagesVibration AssessmentPooria SoroushNo ratings yet
- Vishwakarma Institute of Technology: Issue 01: Rev No. 0: Dt. 16/03/16 Course Plan FormatDocument5 pagesVishwakarma Institute of Technology: Issue 01: Rev No. 0: Dt. 16/03/16 Course Plan FormatjdaudpotoNo ratings yet
- Nptel: Control Engineering - Video CourseDocument1 pageNptel: Control Engineering - Video CourseHarshNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Transient Stability 2Document15 pagesTransient Stability 2yonoka aldinugraha100% (1)
- Motion & Automation Motion & Automation ME 4176: ContactDocument26 pagesMotion & Automation Motion & Automation ME 4176: ContactHien NguyenNo ratings yet
- Control Systems (9171)Document5 pagesControl Systems (9171)Victoria Franco0% (1)
- ME L20 RootLocusLeadDocument6 pagesME L20 RootLocusLeadRezkodaNo ratings yet
- Calculation Modules Power-Flow Analysis Fault Analysis Dynamic Analysis o o oDocument11 pagesCalculation Modules Power-Flow Analysis Fault Analysis Dynamic Analysis o o oAshish MishraNo ratings yet
- Control Engineering II: Thanh T. Tran, PH.D.Document36 pagesControl Engineering II: Thanh T. Tran, PH.D.Thiên BùiNo ratings yet
- Ds Msc-Nastran-Dynamics LTR WDocument2 pagesDs Msc-Nastran-Dynamics LTR WAydinNo ratings yet
- DC Motor Case Study PDFDocument29 pagesDC Motor Case Study PDFliling100% (1)
- Sistem Kendali: Teknik MesinDocument36 pagesSistem Kendali: Teknik MesinSugeng HariyantoNo ratings yet
- Mechatronics DC Motor - Tachometer Closed-Loop Speed Control SystemDocument29 pagesMechatronics DC Motor - Tachometer Closed-Loop Speed Control SystemskheoNo ratings yet
- 2022 01 06 LECTURE 9 ModelingAndCurrentControlDocument62 pages2022 01 06 LECTURE 9 ModelingAndCurrentControlYves DuforezNo ratings yet
- Switch Gear and ProtectionDocument15 pagesSwitch Gear and ProtectionLaxmiKrishnaNo ratings yet
- 4-Principles Adaptive ControlDocument7 pages4-Principles Adaptive ControlSamuel BrandNo ratings yet
- 07 Automatic Generation ControlDocument9 pages07 Automatic Generation Control- FBANo ratings yet
- A Midterm Thesis Presentation On: Effects of Higher Modes On Capacity Curve and Hinge Formation"Document21 pagesA Midterm Thesis Presentation On: Effects of Higher Modes On Capacity Curve and Hinge Formation"Suman TiwariNo ratings yet
- Lecture1 F23Document29 pagesLecture1 F23201151No ratings yet
- Lecture - Week 01 (DBK)Document41 pagesLecture - Week 01 (DBK)Мцндммдԁ ДӡдиNo ratings yet
- Unit 5Document24 pagesUnit 5RiteshNo ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Dynamic Testing TechniquesDocument54 pagesDynamic Testing TechniquesLuis Montoya100% (1)
- Ec ControlDocument335 pagesEc ControladammathewsNo ratings yet
- Micom P241 Motor Management RelayDocument12 pagesMicom P241 Motor Management Relaydave chaudhuryNo ratings yet
- BEKC 3533 Introduction To Control SystemDocument1 pageBEKC 3533 Introduction To Control SystemMike PosktovaNo ratings yet
- Article Choosing Right Communication Protocol Fisher en 178770Document8 pagesArticle Choosing Right Communication Protocol Fisher en 178770Adnan SalihbegovicNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- 2A.I - Panel 1 - Hariram Subramanian - HuaweiDocument2 pages2A.I - Panel 1 - Hariram Subramanian - HuaweiMNo ratings yet
- 3 Ways To Speed Up Model Predictive ControllersDocument26 pages3 Ways To Speed Up Model Predictive ControllersHamzehNo ratings yet
- Course Code: EE303 Linear Control Systems 2-1-0-3 2016 Prerequisite: NilDocument2 pagesCourse Code: EE303 Linear Control Systems 2-1-0-3 2016 Prerequisite: NilSUNOBHAINo ratings yet
- Introduction To Dynamic System Modeling and AnalysisDocument28 pagesIntroduction To Dynamic System Modeling and AnalysisHasan AmerNo ratings yet
- Instrumentation and ControlDocument2 pagesInstrumentation and ControlKrista JacksonNo ratings yet
- Model Predictive ControlDocument49 pagesModel Predictive ControlMaximo Plata LeyNo ratings yet
- English TutorialDocument145 pagesEnglish Tutorialkrunal tripathiNo ratings yet
- Advanced Automatic ControlDocument26 pagesAdvanced Automatic Controlabdullah 3mar abou reashaNo ratings yet
- Ge Lightspeed CT Systems Maintenance (Phase Iii) : Day 2 Lab ActivitiesDocument3 pagesGe Lightspeed CT Systems Maintenance (Phase Iii) : Day 2 Lab ActivitiesMai Thanh SơnNo ratings yet
- Lecture-5 - Classification of Process Variables - Control StrategiesDocument18 pagesLecture-5 - Classification of Process Variables - Control StrategiesKshitij SoniNo ratings yet
- Lecture-6 - Control Stratefgies-Steps in Design of Control SystemDocument24 pagesLecture-6 - Control Stratefgies-Steps in Design of Control SystemKshitij SoniNo ratings yet
- EE016 - Effect of Fault Location On Transient StabilityDocument4 pagesEE016 - Effect of Fault Location On Transient StabilitybhavikNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Ch.03 Modeling in Time DomainDocument11 pagesCh.03 Modeling in Time DomainĐỗ Thiện HiệpNo ratings yet
- Automation and Control Engineering (R17A0327) : 4 Year B. Tech I-Sem, Mechanical EngineeringDocument20 pagesAutomation and Control Engineering (R17A0327) : 4 Year B. Tech I-Sem, Mechanical EngineeringJEYAVEL PALANISAMYNo ratings yet
- Study On Maneuvering of A Large Tanker in Still Water and Adverse Weather ConditionsDocument143 pagesStudy On Maneuvering of A Large Tanker in Still Water and Adverse Weather ConditionsMohamed MohamedNo ratings yet
- 27117 論文Document158 pages27117 論文Mohamed MohamedNo ratings yet
- MARLOG12 Full PaperTemplateEnglish Ver 1 DecDocument5 pagesMARLOG12 Full PaperTemplateEnglish Ver 1 DecMohamed MohamedNo ratings yet
- Structural Design of 3-Axis CNC Machine Tool For Wood CarvingDocument100 pagesStructural Design of 3-Axis CNC Machine Tool For Wood CarvingMohamed MohamedNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityLAKHA ASGARALI ANWARNo ratings yet
- DEIEDocument112 pagesDEIESuri AkulNo ratings yet
- FCS Lab2Document36 pagesFCS Lab2muhammadNo ratings yet
- Btech EE 2015Document71 pagesBtech EE 2015Suyash NathNo ratings yet
- MathematicsCourses For B.TechMTech PDFDocument29 pagesMathematicsCourses For B.TechMTech PDFSanket MathurNo ratings yet
- Ordinary Differential Equations Multiple Choice Questions and Answers - SanfoundryDocument7 pagesOrdinary Differential Equations Multiple Choice Questions and Answers - SanfoundrySaiman PervaizNo ratings yet
- Renewable Energy: J. Buzás, R. KicsinyDocument10 pagesRenewable Energy: J. Buzás, R. KicsinygtchsekharNo ratings yet
- B.SC MathematicsDocument37 pagesB.SC MathematicsMarikannan GNo ratings yet
- Mathematics IDocument247 pagesMathematics IShreya PankajNo ratings yet
- Lec04 - Laplace and Z-TransformDocument50 pagesLec04 - Laplace and Z-TransformRehman SaleemNo ratings yet
- Non Homogeneous Linear SystemsDocument18 pagesNon Homogeneous Linear Systemsd1ucpmq+lny4lsNo ratings yet
- Z TransformDocument28 pagesZ TransformgptkoushikNo ratings yet
- Laplace TransformDocument13 pagesLaplace Transformh6j4vsNo ratings yet
- Slug Test - Rad1Document14 pagesSlug Test - Rad1Hata MilišicNo ratings yet
- Chapter 15 Circuit Analysis in The S-Domaun-1Document36 pagesChapter 15 Circuit Analysis in The S-Domaun-1umerNo ratings yet
- 03 - The Laplace TransformDocument54 pages03 - The Laplace TransformHandi RizkinugrahaNo ratings yet
- MA21/MAT201: RamaiahDocument3 pagesMA21/MAT201: RamaiahTsukasa EishiNo ratings yet
- EC2204QBDocument16 pagesEC2204QBSridhar RamanNo ratings yet
- Laplace Transform PDFDocument13 pagesLaplace Transform PDFPrateekBansalNo ratings yet
- Kappa Dda Book, Feb 2011Document505 pagesKappa Dda Book, Feb 2011Gabriel ColmontNo ratings yet
- Laplace Transforms1Document81 pagesLaplace Transforms1arunkumar SNo ratings yet
- Notes 02 - First Order SystemsDocument2 pagesNotes 02 - First Order SystemsMan JaNo ratings yet
- Swami Ramanand Teerth Marathwada University, Nanded (M.S.) - B.A./B.Sc. Third Year Syllabus (Mathematics) Effective From June - 2015Document11 pagesSwami Ramanand Teerth Marathwada University, Nanded (M.S.) - B.A./B.Sc. Third Year Syllabus (Mathematics) Effective From June - 2015smpopadeNo ratings yet
- Process Dynamics: Modeling, Analysis, and SimulationDocument632 pagesProcess Dynamics: Modeling, Analysis, and SimulationPablo Albert Quispe CapquiqueNo ratings yet
- HD MechDocument62 pagesHD MechSani UnanNo ratings yet
- Soil M PDFDocument24 pagesSoil M PDFsabari nivashNo ratings yet
- Signals and Systems With Matlab (Steven T. Karris)Document36 pagesSignals and Systems With Matlab (Steven T. Karris)Andre RodriguesNo ratings yet
- J.C. Bose University of Science and Technology, Ymca, FaridabadDocument18 pagesJ.C. Bose University of Science and Technology, Ymca, FaridabadSumit MeghNo ratings yet
- Important QuestionsDocument4 pagesImportant QuestionsLatheefNo ratings yet