Download as pdf or txt
You might also like
- Final Exam Information PackageDocument3 pagesFinal Exam Information PackageKahina ZitouniNo ratings yet
- Fanuc PalletizingDocument2 pagesFanuc PalletizingV2No ratings yet
- Set Theory QuizDocument2 pagesSet Theory QuizKevin KeNo ratings yet
- 16-EL-A2 - Mai 2017 - Version AnglaiseDocument7 pages16-EL-A2 - Mai 2017 - Version Anglaisemadani abdelhamidNo ratings yet
- Exam 3. 137372Document21 pagesExam 3. 137372Isaac EsquivelNo ratings yet
- The University of New South Wales School of Electrical Engineering and TelecommunicationsDocument10 pagesThe University of New South Wales School of Electrical Engineering and TelecommunicationskikikikemNo ratings yet
- Ee304 ADocument3 pagesEe304 AAboo FarisNo ratings yet
- Control System 1st Mid Term Paper July Dec 2015Document17 pagesControl System 1st Mid Term Paper July Dec 2015VIPUL100% (2)
- The LNM Institute of Information Technology Ece and Cce ECE 321: Control System Engineering (End-Term Examination)Document17 pagesThe LNM Institute of Information Technology Ece and Cce ECE 321: Control System Engineering (End-Term Examination)Kunal ChamoliNo ratings yet
- March 2022Document2 pagesMarch 2022Narmada BheemaNo ratings yet
- Assignment 1 - Block Diagrams and MatlabSimulinkDocument6 pagesAssignment 1 - Block Diagrams and MatlabSimulinkdavidmeszNo ratings yet
- 4667 Final 2014Document7 pages4667 Final 2014yisakabera123No ratings yet
- Boun Ee 450 Homework 3Document2 pagesBoun Ee 450 Homework 3Ogulcan BaycanNo ratings yet
- 22 23Document2 pages22 23Goura Sundar TripathyNo ratings yet
- AE61Document4 pagesAE61Anima SenNo ratings yet
- Advanced Control Theory (Eee)Document3 pagesAdvanced Control Theory (Eee)Adarsh VkNo ratings yet
- Digital Control Systems May 2007 Question PaperDocument8 pagesDigital Control Systems May 2007 Question Paperelimelek100% (3)
- Rajneesh Yadav - Untitleddesign - Original PDFDocument4 pagesRajneesh Yadav - Untitleddesign - Original PDFsantvan jagtapNo ratings yet
- Ee 357 Control Systems I Final Exam Apr. 28, 2005 DURATION: 120 MinutesDocument5 pagesEe 357 Control Systems I Final Exam Apr. 28, 2005 DURATION: 120 MinuteskowalinatorNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.VinayNo ratings yet
- BDA 30703 Sem 1 1213 PDFDocument7 pagesBDA 30703 Sem 1 1213 PDFJevine LaiNo ratings yet
- Experiment 4Document8 pagesExperiment 4Tonie Adrian DiamanteNo ratings yet
- EE 561: Digital Control Systems Problem Set # 2: Spring 2017Document4 pagesEE 561: Digital Control Systems Problem Set # 2: Spring 2017FunnyTVNo ratings yet
- National Institute of Technology RourkelaDocument2 pagesNational Institute of Technology RourkelaMrinalPattnaikNo ratings yet
- Signals and Systems Laboratory 7Document9 pagesSignals and Systems Laboratory 7Kthiha CnNo ratings yet
- Lund 0003Document6 pagesLund 0003Ali DurazNo ratings yet
- Practice QuestionsDocument3 pagesPractice QuestionsBlair ZhangNo ratings yet
- Sample FinalDocument10 pagesSample FinalsharadpjadhavNo ratings yet
- BCS 054Document4 pagesBCS 054Mark PrestNo ratings yet
- CS Previous Question PapersDocument48 pagesCS Previous Question PapersShaleva SinghNo ratings yet
- K. Write Expression For The Motor Torque On The Load.: V S) V S)Document3 pagesK. Write Expression For The Motor Torque On The Load.: V S) V S)Ganesha KumarNo ratings yet
- Assignment 1Document7 pagesAssignment 1hansingNo ratings yet
- Lecture 12 Reduction of Multiple SubsystemsDocument28 pagesLecture 12 Reduction of Multiple SubsystemsHamza KhanNo ratings yet
- Advanced Control TheoryDocument4 pagesAdvanced Control TheoryAmit BansodNo ratings yet
- Control System - 1 PYQsDocument7 pagesControl System - 1 PYQsAbhishekNo ratings yet
- r05220205 Control SystemsDocument9 pagesr05220205 Control SystemsSrinivasa Rao G100% (3)
- Stucor Qp-Ec3351Document15 pagesStucor Qp-Ec3351Naveen KumarNo ratings yet
- Worksheet 4Document3 pagesWorksheet 4oqmbzhcpdizkbctqrhNo ratings yet
- Tutorial II DesignDocument4 pagesTutorial II Designgeofrey fungoNo ratings yet
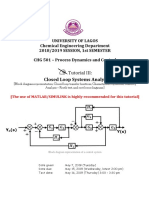
- Closed Loop Systems AnalysisDocument7 pagesClosed Loop Systems AnalysisvictorNo ratings yet
- GEE338 Problem Set #1 Modeling of LTI SystemsDocument5 pagesGEE338 Problem Set #1 Modeling of LTI Systemsmarwanosama229No ratings yet
- rr420201 Digital Control SystemsDocument8 pagesrr420201 Digital Control SystemsSrinivasa Rao GNo ratings yet
- 06 ESm 43 MQDocument6 pages06 ESm 43 MQGuruprasadNo ratings yet
- ĐỀ CƯƠNG ÔN TẬP PHẦN LÝ THUYẾT LTĐKTĐ - 2023-2024 - EN - Final - UploadDocument13 pagesĐỀ CƯƠNG ÔN TẬP PHẦN LÝ THUYẾT LTĐKTĐ - 2023-2024 - EN - Final - UploadThịnh Nguyễn QuốcNo ratings yet
- AC3163 - Subject - Control System Engineering - 6 ME 03 - Year - B.E. Sixth Semester (Mechanical Engineering) (CBCS) Winter 2022Document4 pagesAC3163 - Subject - Control System Engineering - 6 ME 03 - Year - B.E. Sixth Semester (Mechanical Engineering) (CBCS) Winter 2022Gajanan SononeNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityHerat HirparaNo ratings yet
- Section 10-5 Parametric EquationsDocument11 pagesSection 10-5 Parametric EquationsBhupesh KumarNo ratings yet
- Old Question Paper Control SystemsDocument7 pagesOld Question Paper Control SystemsSatendra KushwahaNo ratings yet
- Tutorial 8Document2 pagesTutorial 8Gaurav ANo ratings yet
- R0004e - 2022 08 24Document8 pagesR0004e - 2022 08 24Felix WoxblomNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological Universityfeyayel988No ratings yet
- Control Systems-1 PDFDocument8 pagesControl Systems-1 PDFmaheshbabu527No ratings yet
- Module Bank Control SystemsDocument4 pagesModule Bank Control Systemsgnandini72561No ratings yet
- Question Paper Code:: (10×2 20 Marks)Document4 pagesQuestion Paper Code:: (10×2 20 Marks)MohamedNo ratings yet
- Examination Control Systems 2: Problem 1Document4 pagesExamination Control Systems 2: Problem 1Luis CarvalhoNo ratings yet
- Control Engineering - Question BankDocument6 pagesControl Engineering - Question BankGurusharan Narasimha MurthyNo ratings yet
- Advanced Numerical and Semi-Analytical Methods for Differential EquationsFrom EverandAdvanced Numerical and Semi-Analytical Methods for Differential EquationsNo ratings yet
- Solving Partial Differential Equation Applications with PDE2DFrom EverandSolving Partial Differential Equation Applications with PDE2DNo ratings yet
- Graphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")From EverandGraphs with MATLAB (Taken from "MATLAB for Beginners: A Gentle Approach")Rating: 4 out of 5 stars4/5 (2)
- Practical Finite Element Modeling in Earth Science using MatlabFrom EverandPractical Finite Element Modeling in Earth Science using MatlabNo ratings yet
- Lesson 11 - Tests On TransformersDocument27 pagesLesson 11 - Tests On TransformersKaelel Bilang100% (1)
- Chapter 4Document43 pagesChapter 4Kahina Zitouni0% (1)
- 6 Chapter 5Document34 pages6 Chapter 5Kahina ZitouniNo ratings yet
- Example-1: Power AmplifierDocument2 pagesExample-1: Power AmplifierKahina ZitouniNo ratings yet
- Lecture12-Small Signal Model-BJT PDFDocument12 pagesLecture12-Small Signal Model-BJT PDFKahina ZitouniNo ratings yet
- 6 Chapter 5Document34 pages6 Chapter 5Kahina ZitouniNo ratings yet
- Feedback Control of Dynamic Systems 7th Franklin Chegg SolutionsDocument396 pagesFeedback Control of Dynamic Systems 7th Franklin Chegg SolutionsKahina ZitouniNo ratings yet
- Laporan Akhir Praktikum Pemrograman Berorientasi Objek: Disusun OlehDocument4 pagesLaporan Akhir Praktikum Pemrograman Berorientasi Objek: Disusun OlehMoch YuwanNo ratings yet
- Data Handling: Task 4: Key SkillsDocument9 pagesData Handling: Task 4: Key SkillsjthsNo ratings yet
- Software Verification: EXAMPLE 6-004Document7 pagesSoftware Verification: EXAMPLE 6-004Sushil DhunganaNo ratings yet
- Piktochart e Book 1 The Untapped PotentialDocument37 pagesPiktochart e Book 1 The Untapped PotentialPaula BautistaNo ratings yet
- WWW - Manaresults.co - In: Python ProgrammingDocument3 pagesWWW - Manaresults.co - In: Python Programmingbabudurga700No ratings yet
- DCCN Important Questions From All Units Test-1 - 1Document4 pagesDCCN Important Questions From All Units Test-1 - 1AnithaChristopherNo ratings yet
- Controls YsDocument17 pagesControls Ysbamboo shackNo ratings yet
- 4739 1570796983Document242 pages4739 1570796983JAVIER E. PAREDES B.No ratings yet
- Stephen Hawking - 'Transcendence Looks at The Implications of Artificial Intelligence - But Are We Taking AI Seriously Enough - X 4'Document2 pagesStephen Hawking - 'Transcendence Looks at The Implications of Artificial Intelligence - But Are We Taking AI Seriously Enough - X 4'yeeleongNo ratings yet
- CATIA V5 Composites Part DesignDocument1 pageCATIA V5 Composites Part DesignZahin RahmanNo ratings yet
- Rapiscan Integrated Cargo ScanningDocument2 pagesRapiscan Integrated Cargo ScanningAmit ChaudharyNo ratings yet
- Ekuma, Ojim William CVDocument3 pagesEkuma, Ojim William CVCassandra MeyersNo ratings yet
- EN Ziehm 8000Document3 pagesEN Ziehm 8000ahmed_galal_waly1056No ratings yet
- Assignments of CGDocument10 pagesAssignments of CGAshok MallNo ratings yet
- Dsa Basic Data StructureDocument72 pagesDsa Basic Data StructureVamsi PradeepNo ratings yet
- Core Java Interview Questions and AnswersDocument10 pagesCore Java Interview Questions and AnswersMary JamesNo ratings yet
- Reg Ex Cheat SheetDocument1 pageReg Ex Cheat SheetNitishNo ratings yet
- IntegrationDocument3 pagesIntegrationAmreen MeeajunNo ratings yet
- Lecturer Notes BCA Pt-II - OOPs Unit-V File Management-IDocument11 pagesLecturer Notes BCA Pt-II - OOPs Unit-V File Management-IRoyal Green AchrolNo ratings yet
- CCNA Summer Traning ReportDocument57 pagesCCNA Summer Traning ReportVishav VermaNo ratings yet
- Installation Cookbook Configure CAF / GP On NWDI 7.00: Release: 1.0Document10 pagesInstallation Cookbook Configure CAF / GP On NWDI 7.00: Release: 1.0Abhi_shek Go_elNo ratings yet
- Modifying An Existing Document With IText PDF API in JavaDocument3 pagesModifying An Existing Document With IText PDF API in JavastrokenfilledNo ratings yet
- Annexure EDocument186 pagesAnnexure EjnmanivannanNo ratings yet
- EdaDocument12 pagesEdaInspiring Evolution100% (1)
- Digital Marketing Is The Promotion of ProductsDocument8 pagesDigital Marketing Is The Promotion of ProductsAkshat AgarwalNo ratings yet
- Adrian ParryDocument25 pagesAdrian ParryDeepraj PathakNo ratings yet
- POSIX Threads Programming: Blaise Barney, Lawrence Livermore National LaboratoryDocument36 pagesPOSIX Threads Programming: Blaise Barney, Lawrence Livermore National Laboratoryyogi.kss3482No ratings yet
- How To Return Multiple Coulmn Values Using Unconnected LookupDocument5 pagesHow To Return Multiple Coulmn Values Using Unconnected LookupadiadisuriNo ratings yet