Download as pdf or txt
You might also like
- IES Test Prep Answer Explanations For SAT GrammarDocument72 pagesIES Test Prep Answer Explanations For SAT GrammarĐ̸̢͓͉̣͔̭̜̭͉̰́͌͑͊̇̏̕̚͜͜ͅứ̷̢̛̘̭̤͎̩̣̩̊̆̑̓̽̓͗ͅc̴̟͈̠̤̪͈͍̰̟̤̮̆̄̈́̈̃̏̃̑̊͠͝ä̷̧̰̲̦́̒̐͝ṉ̵̾̀͗̾h̷̥͆͑̍͌͆̋̈́́͒͂̇͘̚ Đ̸̢͓͉̣͔̭̜̭͉̰́͌͑͊̇̏̕̚͜͜ͅứ̷̢̛̘̭̤͎̩̣̩̊̆̑̓̽̓͗ͅc̴̟͈̠̤̪͈͍̰̟̤̮̆̄̈́̈̃̏̃̑̊͠͝ä̷̧̰̲̦́̒̐͝ṉ̵̾̀͗̾h̷̥͆͑̍͌͆̋̈́́͒͂̇͘75% (4)
- L211 Series Resonance and TimeFrequency Response of Passive Networks PDFDocument25 pagesL211 Series Resonance and TimeFrequency Response of Passive Networks PDFglenlcy100% (1)
- Two StageDocument6 pagesTwo StageSiphosethuSidloyiNo ratings yet
- Audio Spectrum Analyzer - Circuit Desgin ProjectDocument29 pagesAudio Spectrum Analyzer - Circuit Desgin ProjectNinh Ngoc Dzu95% (22)
- Ece 334 ManualDocument37 pagesEce 334 ManualZelalem GirmaNo ratings yet
- Airport Literature StudyDocument15 pagesAirport Literature StudySoundar Rajan100% (2)
- Subwoofer Active Low Pass FilterDocument11 pagesSubwoofer Active Low Pass FilterFrank De Leon VailNo ratings yet
- Butterworth FilterDocument6 pagesButterworth FilterSauravAbidRahmanNo ratings yet
- Active and Passive FiltersDocument11 pagesActive and Passive FiltersHemanshu DasNo ratings yet
- Analog ReportDocument3 pagesAnalog ReportMarie Audrey ToukoNo ratings yet
- Butter Worth Filter DesignDocument4 pagesButter Worth Filter DesignCan ÇamlıkNo ratings yet
- RF Filter Design5Document6 pagesRF Filter Design5Joel WreckedNo ratings yet
- Chapter 4Document39 pagesChapter 4Shoaib MughalNo ratings yet
- Lab 4 Band Pass and Band Reject Filters CompressDocument8 pagesLab 4 Band Pass and Band Reject Filters CompressAbhijith DileepkumarNo ratings yet
- ENTC 3320: Active FiltersDocument60 pagesENTC 3320: Active FiltersAbdullah NisarNo ratings yet
- Lab - L3411Document10 pagesLab - L3411Muhammad AhmedNo ratings yet
- Cascode AmplifierDocument6 pagesCascode AmplifierRajesh NatarajanNo ratings yet
- An 1162Document36 pagesAn 1162naniknanikNo ratings yet
- Implementation of Second Order Switched Capacitors Filters With Feedback SignalDocument3 pagesImplementation of Second Order Switched Capacitors Filters With Feedback SignalInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Low - Pass FilterDocument8 pagesLow - Pass FilterSaurabh BhiseNo ratings yet
- Ladder Filters, Butterworth & Chebyshev Filters, Filter Tables & Freq/Imp ScalingDocument16 pagesLadder Filters, Butterworth & Chebyshev Filters, Filter Tables & Freq/Imp ScalingShobhit GuptaNo ratings yet
- Band Pass Filter Design Part 1. Band Pass Filters From First Principles Richard Harris G3OTKDocument13 pagesBand Pass Filter Design Part 1. Band Pass Filters From First Principles Richard Harris G3OTKopachecoNo ratings yet
- Lab 1:introduction To Signals, Passive RC Filters and OpampsDocument7 pagesLab 1:introduction To Signals, Passive RC Filters and Opampsmrcinek01No ratings yet
- Engineering Design and Stimulation (EDE124) : Lab 5: Part A-RC FilterDocument9 pagesEngineering Design and Stimulation (EDE124) : Lab 5: Part A-RC FilterKevin Jong Khai WoonNo ratings yet
- AMlab 24th AprDocument4 pagesAMlab 24th AprNushran NufailNo ratings yet
- Compensation Method Peak Current Mode Control Buck AN028 enDocument13 pagesCompensation Method Peak Current Mode Control Buck AN028 ensadqazwsxNo ratings yet
- Microwave Filters - Theoretical InformationDocument18 pagesMicrowave Filters - Theoretical InformationhonquellNo ratings yet
- Active Filter LabDocument10 pagesActive Filter LabHimmawan Sabda MaulanaNo ratings yet
- Unusual Filter CktsDocument46 pagesUnusual Filter Cktsraineymj100% (1)
- LowPass Butter Worth Filter by Manraj Singh GujralDocument7 pagesLowPass Butter Worth Filter by Manraj Singh GujralManraj GujralNo ratings yet
- CCCDBA Based Voltage Mode KHN Biquadratic FiltersDocument4 pagesCCCDBA Based Voltage Mode KHN Biquadratic FiltersIDESNo ratings yet
- Lab 4 Filter DesignDocument6 pagesLab 4 Filter DesignSandeep PatwaNo ratings yet
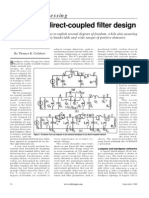
- Interactive Direct-Coupled Filter DesignDocument8 pagesInteractive Direct-Coupled Filter Designjo123zsiNo ratings yet
- Files 3-Lesson Notes Lecture 17Document6 pagesFiles 3-Lesson Notes Lecture 17kingboyNo ratings yet
- Lab Report 2Document17 pagesLab Report 2Nguyễn ThắngNo ratings yet
- RF Lab Report 1Document19 pagesRF Lab Report 1Nguyễn ThắngNo ratings yet
- RC Phase Shift Oscillator and RC Coupled Ce Amplifier - Lab ExperimentDocument8 pagesRC Phase Shift Oscillator and RC Coupled Ce Amplifier - Lab ExperimentMani BharathiNo ratings yet
- First Order RC High Pass Filter: ObjectivesDocument4 pagesFirst Order RC High Pass Filter: ObjectivesismailNo ratings yet
- Graphic EqualizerDocument19 pagesGraphic Equalizerpapagiano35100% (1)
- Bmen3120 Project1 Frequency Selective Circuit 1Document12 pagesBmen3120 Project1 Frequency Selective Circuit 1api-3139933760% (2)
- Ecad Lab ManualDocument83 pagesEcad Lab ManualJacklyn Untalan100% (1)
- Switched Capacitor Band-Pass Filter 0.1 Object: C 3 DB BPDocument16 pagesSwitched Capacitor Band-Pass Filter 0.1 Object: C 3 DB BPmohamedNo ratings yet
- Filters 2Document60 pagesFilters 2Nguyễn Hoàng KhaNo ratings yet
- Experiment RC FiltersDocument11 pagesExperiment RC FiltersingeniouNo ratings yet
- Lab 2 - ECE 223Document8 pagesLab 2 - ECE 223Lynn NguyenNo ratings yet
- Assignment 2 - Basic Electronic ComponentsDocument3 pagesAssignment 2 - Basic Electronic ComponentsRafael PereiraNo ratings yet
- Design and Characterization of A Band-Pass Filter PDFDocument6 pagesDesign and Characterization of A Band-Pass Filter PDFjgalindesNo ratings yet
- Lab 3Document6 pagesLab 3Saurabh BhiseNo ratings yet
- RF Electronic Preparatory Ii: Amplifier and Filter Laboratory ExerciseDocument12 pagesRF Electronic Preparatory Ii: Amplifier and Filter Laboratory ExercisesvinqtaNo ratings yet
- Lab 3Document5 pagesLab 3معتصم الكاملNo ratings yet
- Development of The Carioca Front-End Chip For The LHCB Muon DetectorDocument11 pagesDevelopment of The Carioca Front-End Chip For The LHCB Muon DetectorAmir SultanNo ratings yet
- Common Mode Filter Design Guide PDFDocument4 pagesCommon Mode Filter Design Guide PDFNikolay SvatovNo ratings yet
- Band Pass Filter Design Part 2. Band Pass Filters From First Principles Richard Harris G3OTKDocument11 pagesBand Pass Filter Design Part 2. Band Pass Filters From First Principles Richard Harris G3OTKopachecoNo ratings yet
- Isro 2018Document71 pagesIsro 2018gnanarani nambiNo ratings yet
- Basic Electronics Model Question Paper 1Document35 pagesBasic Electronics Model Question Paper 1Mr girishNo ratings yet
- End Term E3 238Document6 pagesEnd Term E3 238bommena vishwa tejaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- Nepra ManualDocument60 pagesNepra Manualabdulwasay_bzuNo ratings yet
- A. Title of Experiment B. Date and Time of Experiment: Wednesday, 10Document15 pagesA. Title of Experiment B. Date and Time of Experiment: Wednesday, 10LichaNo ratings yet
- En Mongolia 06Document39 pagesEn Mongolia 06Sandeep DasNo ratings yet
- Asma G.SDocument5 pagesAsma G.SAfia FaheemNo ratings yet
- Form 67 Delivery Unloading and Loading of Materials and PlantDocument6 pagesForm 67 Delivery Unloading and Loading of Materials and PlantMohamed MedhioubNo ratings yet
- OHara PDFDocument17 pagesOHara PDFTomás HidalgoNo ratings yet
- SONTU Flat Panel Dectector CatalogDocument6 pagesSONTU Flat Panel Dectector CatalogWajahat SheikhNo ratings yet
- Business Presentation YAKULTDocument12 pagesBusiness Presentation YAKULTJosuaNo ratings yet
- MG 2 - TEMA 1 Limba EnglezaDocument4 pagesMG 2 - TEMA 1 Limba Englezamimi12345678910No ratings yet
- Masterglenium Ace: Solutions For The Pre-Cast IndustryDocument7 pagesMasterglenium Ace: Solutions For The Pre-Cast IndustryAlanNo ratings yet
- Functional Specification For Deck CraneDocument31 pagesFunctional Specification For Deck Craneaiyubi20% (1)
- Allotrope Partners Indonesia Renewable Energy Project AssociateDocument2 pagesAllotrope Partners Indonesia Renewable Energy Project AssociateRizal ZulkarnaenNo ratings yet
- Data Transformation by Andy FieldDocument1 pageData Transformation by Andy FieldGon MartNo ratings yet
- Owner: PT. Baker Hughes User: Cok Gede Reza Description: Modified Safety Pin, Add. Handrail & Add. Anti Slip Step Stair at Pressure Test BayDocument3 pagesOwner: PT. Baker Hughes User: Cok Gede Reza Description: Modified Safety Pin, Add. Handrail & Add. Anti Slip Step Stair at Pressure Test BayMuhammad AlpianNo ratings yet
- Exit Poll CedatosDocument1 pageExit Poll CedatosEcuadorenvivoNo ratings yet
- FlapDocument100 pagesFlapRicha Agrawal100% (2)
- Supplement Guide Memory FocusDocument41 pagesSupplement Guide Memory Focusgogov.digitalNo ratings yet
- Koch - Control ChartsDocument40 pagesKoch - Control ChartsAkash MarathakamNo ratings yet
- 5 25 17 Migraines PowerPointDocument40 pages5 25 17 Migraines PowerPointSaifi AlamNo ratings yet
- Bronchial Cancer Case StudyDocument3 pagesBronchial Cancer Case StudyericaNo ratings yet
- Gds Manual Flo2d ProDocument182 pagesGds Manual Flo2d ProbycmNo ratings yet
- Spider-81 Hardware Spec 7.7Document7 pagesSpider-81 Hardware Spec 7.7KonradNo ratings yet
- Straumann Product Catalogue 2018 2019Document260 pagesStraumann Product Catalogue 2018 2019kllasikalleNo ratings yet
- Fetomaternal Hemorrhage (FMH), An Update Review of LiteratureDocument35 pagesFetomaternal Hemorrhage (FMH), An Update Review of LiteratureEugenia Jeniffer JNo ratings yet
- Research Progress of The Arti Ficial Intelligence Application in Wastewater Treatment During 2012 - 2022: A Bibliometric AnalysisDocument17 pagesResearch Progress of The Arti Ficial Intelligence Application in Wastewater Treatment During 2012 - 2022: A Bibliometric AnalysisjinxiaohuibabaNo ratings yet
- Cibse Solar AcDocument11 pagesCibse Solar Acdhananjay176No ratings yet
- Manual Epson L555Document92 pagesManual Epson L555Asesorias Académicas En CaliNo ratings yet
- Green Building Toward Construction Sustainability: Energy Efficiency With Material and Design AspectsDocument11 pagesGreen Building Toward Construction Sustainability: Energy Efficiency With Material and Design AspectsghchgNo ratings yet