
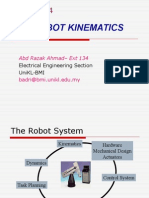
4 - DH Representation
4 - DH Representation
You might also like
- Sol 04Document3 pagesSol 04kirk putmanNo ratings yet
- Rigid Motion and Homogeneous Transformation PDFDocument9 pagesRigid Motion and Homogeneous Transformation PDFabcNo ratings yet
- Coordinate Systems and Transformations: TopicsDocument19 pagesCoordinate Systems and Transformations: TopicshdphimxemNo ratings yet
- Reference Trajectory Tracking For A multi-DOF Robot Arm: 10.1515/acsc-2015-0033Document15 pagesReference Trajectory Tracking For A multi-DOF Robot Arm: 10.1515/acsc-2015-0033Zafer GökNo ratings yet
- Mce647 4 HandDocument8 pagesMce647 4 HandAbdelaziz IderNo ratings yet
- PHOTORAYDocument11 pagesPHOTORAYMangalamma BNo ratings yet
- Chapter3-Velocity Analysis of LinkagesDocument57 pagesChapter3-Velocity Analysis of LinkagesMohammed Al-OdatNo ratings yet
- Chapter3 180103072217Document57 pagesChapter3 180103072217Ahmed Sobhi l أحمد صبحيNo ratings yet
- 15 - Orbital Angular Momentum and Spherical Harmonics PDFDocument13 pages15 - Orbital Angular Momentum and Spherical Harmonics PDFUltrazordNo ratings yet
- Robot Kinematics: A Large Part of Robot Kinematics Is Concerned With TheDocument32 pagesRobot Kinematics: A Large Part of Robot Kinematics Is Concerned With TheHarsha VardhanNo ratings yet
- 4 RotationsDocument6 pages4 Rotationsavnworspace978No ratings yet
- Chap 4 - Robot KinematicsDocument153 pagesChap 4 - Robot KinematicsMohd Syafiq Umran100% (1)
- Lecture3 PDFDocument19 pagesLecture3 PDFNovianti MarthenNo ratings yet
- CH 1Document30 pagesCH 1amaranejiNo ratings yet
- Chapter 8: Orbital Angular Momentum And: Molecular RotationsDocument23 pagesChapter 8: Orbital Angular Momentum And: Molecular RotationstomasstolkerNo ratings yet
- Coordinate Systems in PhysicsDocument7 pagesCoordinate Systems in PhysicsObert MutavaNo ratings yet
- Rotation Matrix RepresentationsDocument4 pagesRotation Matrix RepresentationsMekaTronNo ratings yet
- 2.transformation of Vectors and Intro To TensorsDocument3 pages2.transformation of Vectors and Intro To TensorsBipanjit SinghNo ratings yet
- 2005 SolveDocument16 pages2005 SolveAnirbaan SahaNo ratings yet
- 3D Geometric Transformations: M.A.K Jailani Assistant Professor Dept. of Computer Applications Sastra UniversityDocument30 pages3D Geometric Transformations: M.A.K Jailani Assistant Professor Dept. of Computer Applications Sastra Universityaruldinesh01No ratings yet
- Symmetric Subspace Motion Generators: Yuanqing Wu, Member, IEEE, and Marco Carricato, Member, IEEEDocument20 pagesSymmetric Subspace Motion Generators: Yuanqing Wu, Member, IEEE, and Marco Carricato, Member, IEEEYuanqingWuNo ratings yet
- The Groups SO (3) and SUDocument7 pagesThe Groups SO (3) and SUMax PieriniNo ratings yet
- Two-Image Resituation: Practical Algorithm: General Coplanarity Matrix Special Coplanarity MatrixDocument17 pagesTwo-Image Resituation: Practical Algorithm: General Coplanarity Matrix Special Coplanarity MatrixAyoub Saber OulhiNo ratings yet
- BEARD, R. Quadrotor Dynamics and Control. Brigham Young University, 2008 - Rev 0.1Document48 pagesBEARD, R. Quadrotor Dynamics and Control. Brigham Young University, 2008 - Rev 0.1Wanderson TeotonioNo ratings yet
- Quadrotor Dynamics and ControlDocument48 pagesQuadrotor Dynamics and ControlMário Sérgio DiasNo ratings yet
- Quadrotor Dynamics and ControlDocument47 pagesQuadrotor Dynamics and ControlAli Emrah YararNo ratings yet
- Irb1 4 PDFDocument6 pagesIrb1 4 PDFvamsi nadakuditiNo ratings yet
- Set 11Document15 pagesSet 11agosztNo ratings yet
- IR - Chapitre 3.1 - For STDocument15 pagesIR - Chapitre 3.1 - For STThiện HoàngNo ratings yet
- Chirikjian The Matrix Exponential in KinematicsDocument12 pagesChirikjian The Matrix Exponential in KinematicsIgnacioNo ratings yet
- 11 - Rotations in Ordinary Space PDFDocument17 pages11 - Rotations in Ordinary Space PDFUltrazordNo ratings yet
- Three-Dimensional Rotation Matrices: 1 T T T T 2Document18 pagesThree-Dimensional Rotation Matrices: 1 T T T T 2Tipu KhanNo ratings yet
- RotationsDocument32 pagesRotationsNeymar MessiNo ratings yet
- Coordinate Systems: MW MW MW MW MWDocument4 pagesCoordinate Systems: MW MW MW MW MWSuresh NatarajanNo ratings yet
- 05 Instantaneous Axis of RotationDocument14 pages05 Instantaneous Axis of RotationSupriyo DuttaNo ratings yet
- Chapter Three Velocity AnalysisDocument57 pagesChapter Three Velocity Analysismekete mulualemNo ratings yet
- Robot Arms, Hands: Kinematics: With Slides From Renata MelamudDocument59 pagesRobot Arms, Hands: Kinematics: With Slides From Renata Melamudjose_balcazar89No ratings yet
- CG Cheat Sheet 2020Document6 pagesCG Cheat Sheet 2020Nitesh MalviyaNo ratings yet
- Forward Kinematics: February 4, 2016Document6 pagesForward Kinematics: February 4, 2016Kartik aminNo ratings yet
- RoboticsDocument10 pagesRoboticsjaiy12No ratings yet
- Kumbojkar Triple IntegralsDocument23 pagesKumbojkar Triple Integralsaditya.sschNo ratings yet
- PhotogrammetryDocument45 pagesPhotogrammetryValerie VictoriaNo ratings yet
- Chapter2 PDFDocument43 pagesChapter2 PDFBelayneh BirhanNo ratings yet
- Problem Set in High EnergyDocument2 pagesProblem Set in High EnergysachinNo ratings yet
- Lecture 1Document5 pagesLecture 1johnte vokeNo ratings yet
- Addis Ababa Science and Technology University (Aastu) Industrial Automation and Introduction To RoboticsDocument47 pagesAddis Ababa Science and Technology University (Aastu) Industrial Automation and Introduction To Roboticsbereketab mulugetaNo ratings yet
- Tensor Algebra: PH701/NITK/September 22, 2020Document6 pagesTensor Algebra: PH701/NITK/September 22, 2020Myself GamerNo ratings yet
- Pot 078Document7 pagesPot 078Zafer ÜnalNo ratings yet
- Game Engine Programming 2 Week 3 Module 3Document25 pagesGame Engine Programming 2 Week 3 Module 3Dean LevyNo ratings yet
- Lecture 4 MTH301Document7 pagesLecture 4 MTH301studentNo ratings yet
- Rotation and Angular Momentum: RotationsDocument20 pagesRotation and Angular Momentum: RotationsSayan RoyNo ratings yet
- Dynamics-Assigment 2Document16 pagesDynamics-Assigment 2imran5705074No ratings yet
- Non-Linear Strogatz 4Document4 pagesNon-Linear Strogatz 4Oscar CordobaNo ratings yet
- AMI 40 From175to186 PDFDocument12 pagesAMI 40 From175to186 PDFJagadeeshMadugulaNo ratings yet
- Chapter ObjectivesDocument24 pagesChapter ObjectivesArafat Hossain AkashNo ratings yet
- Cinemática I. Estudio de La PosiciónDocument20 pagesCinemática I. Estudio de La PosiciónJonathanIbarraCarbajalNo ratings yet
- SU (2) and SO (3) : 1 The Group of RotationsDocument5 pagesSU (2) and SO (3) : 1 The Group of RotationsmarioasensicollantesNo ratings yet
- Arbitary Rotation ProofDocument3 pagesArbitary Rotation Proofmohamed2010526No ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Sustainable Development Goal - 7Document14 pagesSustainable Development Goal - 7siamaeNo ratings yet
- Store, Retrieve Process: Database Management, Presentations, Games and MoreDocument3 pagesStore, Retrieve Process: Database Management, Presentations, Games and MoresiamaeNo ratings yet
- Observation: A) Anode Cathode Voltage of SR3 and Gate Voltage of SR4 of DC Switch Opening and ClosingDocument4 pagesObservation: A) Anode Cathode Voltage of SR3 and Gate Voltage of SR4 of DC Switch Opening and ClosingsiamaeNo ratings yet
- Assin 2Document6 pagesAssin 2siamaeNo ratings yet
- Pfister2008a ICEM Torque Measurement Methods For Very High Speed Synchronous Motors DownloadéDocument5 pagesPfister2008a ICEM Torque Measurement Methods For Very High Speed Synchronous Motors DownloadésiamaeNo ratings yet
- United States PatentDocument4 pagesUnited States PatentsiamaeNo ratings yet
- Draft Sorp (Ceb) - 27 May 2016Document220 pagesDraft Sorp (Ceb) - 27 May 2016siamaeNo ratings yet
- Pscad SimulationDocument4 pagesPscad SimulationsiamaeNo ratings yet
- Assignment 5 - Operation ManagementDocument1 pageAssignment 5 - Operation ManagementsiamaeNo ratings yet
- Underground Powerhouse Cavern and Transformer Cavern Excavation Process Has Been CompletedDocument3 pagesUnderground Powerhouse Cavern and Transformer Cavern Excavation Process Has Been CompletedsiamaeNo ratings yet
- Heat Load Calculation (Cold Storage Plant)Document3 pagesHeat Load Calculation (Cold Storage Plant)Kenny Graiven81% (26)
- Socrates Theory of PhilosophyDocument20 pagesSocrates Theory of PhilosophysiamaeNo ratings yet
- Assignment No. 01Document2 pagesAssignment No. 01siamaeNo ratings yet
- EE3001 - Advanced Measurements: Digital FiltersDocument38 pagesEE3001 - Advanced Measurements: Digital Filterssiamae100% (1)
- Course Development Plan General InformationDocument50 pagesCourse Development Plan General InformationsiamaeNo ratings yet
- Closed Loop DC MotorDocument6 pagesClosed Loop DC MotorsiamaeNo ratings yet
- Store, Retrieve Process: Database Management, Presentations, Games and MoreDocument3 pagesStore, Retrieve Process: Database Management, Presentations, Games and MoresiamaeNo ratings yet
- Tutorial 3: - LGSI Zee in Bending: Z 12 X 2.5 14g, F 50ksi - ObjectiveDocument11 pagesTutorial 3: - LGSI Zee in Bending: Z 12 X 2.5 14g, F 50ksi - ObjectivekhayatNo ratings yet
- VII EC - SyDocument11 pagesVII EC - SymohitNo ratings yet
- Compare and Contrast Essay Assignment Week 4 Coronavirus Versus Influenza GHead8538Document5 pagesCompare and Contrast Essay Assignment Week 4 Coronavirus Versus Influenza GHead8538iqbaloktavianNo ratings yet
- The Carpenters-This MasqueradeDocument1 pageThe Carpenters-This MasqueradeMaría GoldsteinNo ratings yet
- Spatial Neglect - Overview, Etiology, Mechanisms and Morbidities in Spatial NeglectDocument9 pagesSpatial Neglect - Overview, Etiology, Mechanisms and Morbidities in Spatial NeglectRivulet1No ratings yet
- A Taste of MurderDocument6 pagesA Taste of Murderjluis1980No ratings yet
- UNDERSTANDING AND DEVELOPING THE OBJECTIVES OF TRAINING and FACILITATION OF LEARNINGDocument23 pagesUNDERSTANDING AND DEVELOPING THE OBJECTIVES OF TRAINING and FACILITATION OF LEARNINGshweta_46664100% (3)
- Goli InfluencerTalkingPoints 20201106-USDocument5 pagesGoli InfluencerTalkingPoints 20201106-USOnline StoreNo ratings yet
- Home Life Among The Sangam Age v2Document104 pagesHome Life Among The Sangam Age v2Ravi SoniNo ratings yet
- Hugs in The City: Author: Milly Brouard Illustrators: JP Brouard, Kalynne VorsterDocument19 pagesHugs in The City: Author: Milly Brouard Illustrators: JP Brouard, Kalynne VorsterShalini MNo ratings yet
- Documento - MX Solucionario Administracioacuten de Operaciones 12va Edicion Chase Richard JacobsDocument10 pagesDocumento - MX Solucionario Administracioacuten de Operaciones 12va Edicion Chase Richard JacobsAnderson InsuastiNo ratings yet
- Prefinal Lesson2 Literary - DevicesDocument18 pagesPrefinal Lesson2 Literary - DevicesCarina Margallo CelajeNo ratings yet
- BSBCUS501 Content FileDocument175 pagesBSBCUS501 Content FileChirag GoyalNo ratings yet
- Understanding The Coping Strategies of Selected Filipinos Victimized by Typhoon Ondoy Across LifespanDocument17 pagesUnderstanding The Coping Strategies of Selected Filipinos Victimized by Typhoon Ondoy Across LifespanrxpturousNo ratings yet
- Okeefe Courtney Self-Care Final Eval Spring 2022Document7 pagesOkeefe Courtney Self-Care Final Eval Spring 2022api-606420000No ratings yet
- Implementing Smart FactoryDocument10 pagesImplementing Smart FactoryUcup VespaNo ratings yet
- AADocument238 pagesAAmarnekibNo ratings yet
- The Effect of Oral Care With Chlorhexidine PDFDocument7 pagesThe Effect of Oral Care With Chlorhexidine PDFALISSON DAYAN CHICA HERRERANo ratings yet
- CSD Step 1 Reading (Days 4-6)Document36 pagesCSD Step 1 Reading (Days 4-6)Jeff LacasandileNo ratings yet
- Chapter 6Document10 pagesChapter 6Rohish MehtaNo ratings yet
- Operations Management: Supplement 6 - Statistical Process ControlDocument73 pagesOperations Management: Supplement 6 - Statistical Process ControlShubham SharmaNo ratings yet
- Upheaval Buckling Assessment Based On Pipeline FeaturesDocument10 pagesUpheaval Buckling Assessment Based On Pipeline FeaturesabhmarsNo ratings yet
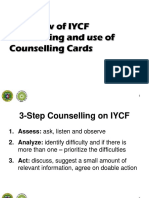
- IYCF Counselling Cards ChildFundPCADocument34 pagesIYCF Counselling Cards ChildFundPCAChris-Goldie LorezoNo ratings yet
- MacDonald - Augustine's Cognitive Voluntariam in de Trinitate 11Document10 pagesMacDonald - Augustine's Cognitive Voluntariam in de Trinitate 11Philipp TschirkNo ratings yet
- AAST-CC312-Fall 21-Lec 10Document21 pagesAAST-CC312-Fall 21-Lec 10youssef hossamNo ratings yet
- Letter of Invite For Gallery Walk Docents 2-22Document1 pageLetter of Invite For Gallery Walk Docents 2-22api-239016405No ratings yet
- Brain ImagingDocument14 pagesBrain ImagingSenal Malaka PremarathnaNo ratings yet
- Community Corrections Case StudyDocument5 pagesCommunity Corrections Case Studyapi-594892891No ratings yet
- The Entrepreneurial' Refugee in The Bazaars: Sindhi Migrants in Jaipur's Walled CityDocument15 pagesThe Entrepreneurial' Refugee in The Bazaars: Sindhi Migrants in Jaipur's Walled CityYash SoniNo ratings yet
- Actividad 2 Ingles 3Document4 pagesActividad 2 Ingles 3DaEn TorrenzNo ratings yet









































































































Download as pdf or txt
You might also like
- Sol 04Document3 pagesSol 04kirk putmanNo ratings yet
- Rigid Motion and Homogeneous Transformation PDFDocument9 pagesRigid Motion and Homogeneous Transformation PDFabcNo ratings yet
- Coordinate Systems and Transformations: TopicsDocument19 pagesCoordinate Systems and Transformations: TopicshdphimxemNo ratings yet
- Reference Trajectory Tracking For A multi-DOF Robot Arm: 10.1515/acsc-2015-0033Document15 pagesReference Trajectory Tracking For A multi-DOF Robot Arm: 10.1515/acsc-2015-0033Zafer GökNo ratings yet
- Mce647 4 HandDocument8 pagesMce647 4 HandAbdelaziz IderNo ratings yet
- PHOTORAYDocument11 pagesPHOTORAYMangalamma BNo ratings yet
- Chapter3-Velocity Analysis of LinkagesDocument57 pagesChapter3-Velocity Analysis of LinkagesMohammed Al-OdatNo ratings yet
- Chapter3 180103072217Document57 pagesChapter3 180103072217Ahmed Sobhi l أحمد صبحيNo ratings yet
- 15 - Orbital Angular Momentum and Spherical Harmonics PDFDocument13 pages15 - Orbital Angular Momentum and Spherical Harmonics PDFUltrazordNo ratings yet
- Robot Kinematics: A Large Part of Robot Kinematics Is Concerned With TheDocument32 pagesRobot Kinematics: A Large Part of Robot Kinematics Is Concerned With TheHarsha VardhanNo ratings yet
- 4 RotationsDocument6 pages4 Rotationsavnworspace978No ratings yet
- Chap 4 - Robot KinematicsDocument153 pagesChap 4 - Robot KinematicsMohd Syafiq Umran100% (1)
- Lecture3 PDFDocument19 pagesLecture3 PDFNovianti MarthenNo ratings yet
- CH 1Document30 pagesCH 1amaranejiNo ratings yet
- Chapter 8: Orbital Angular Momentum And: Molecular RotationsDocument23 pagesChapter 8: Orbital Angular Momentum And: Molecular RotationstomasstolkerNo ratings yet
- Coordinate Systems in PhysicsDocument7 pagesCoordinate Systems in PhysicsObert MutavaNo ratings yet
- Rotation Matrix RepresentationsDocument4 pagesRotation Matrix RepresentationsMekaTronNo ratings yet
- 2.transformation of Vectors and Intro To TensorsDocument3 pages2.transformation of Vectors and Intro To TensorsBipanjit SinghNo ratings yet
- 2005 SolveDocument16 pages2005 SolveAnirbaan SahaNo ratings yet
- 3D Geometric Transformations: M.A.K Jailani Assistant Professor Dept. of Computer Applications Sastra UniversityDocument30 pages3D Geometric Transformations: M.A.K Jailani Assistant Professor Dept. of Computer Applications Sastra Universityaruldinesh01No ratings yet
- Symmetric Subspace Motion Generators: Yuanqing Wu, Member, IEEE, and Marco Carricato, Member, IEEEDocument20 pagesSymmetric Subspace Motion Generators: Yuanqing Wu, Member, IEEE, and Marco Carricato, Member, IEEEYuanqingWuNo ratings yet
- The Groups SO (3) and SUDocument7 pagesThe Groups SO (3) and SUMax PieriniNo ratings yet
- Two-Image Resituation: Practical Algorithm: General Coplanarity Matrix Special Coplanarity MatrixDocument17 pagesTwo-Image Resituation: Practical Algorithm: General Coplanarity Matrix Special Coplanarity MatrixAyoub Saber OulhiNo ratings yet
- BEARD, R. Quadrotor Dynamics and Control. Brigham Young University, 2008 - Rev 0.1Document48 pagesBEARD, R. Quadrotor Dynamics and Control. Brigham Young University, 2008 - Rev 0.1Wanderson TeotonioNo ratings yet
- Quadrotor Dynamics and ControlDocument48 pagesQuadrotor Dynamics and ControlMário Sérgio DiasNo ratings yet
- Quadrotor Dynamics and ControlDocument47 pagesQuadrotor Dynamics and ControlAli Emrah YararNo ratings yet
- Irb1 4 PDFDocument6 pagesIrb1 4 PDFvamsi nadakuditiNo ratings yet
- Set 11Document15 pagesSet 11agosztNo ratings yet
- IR - Chapitre 3.1 - For STDocument15 pagesIR - Chapitre 3.1 - For STThiện HoàngNo ratings yet
- Chirikjian The Matrix Exponential in KinematicsDocument12 pagesChirikjian The Matrix Exponential in KinematicsIgnacioNo ratings yet
- 11 - Rotations in Ordinary Space PDFDocument17 pages11 - Rotations in Ordinary Space PDFUltrazordNo ratings yet
- Three-Dimensional Rotation Matrices: 1 T T T T 2Document18 pagesThree-Dimensional Rotation Matrices: 1 T T T T 2Tipu KhanNo ratings yet
- RotationsDocument32 pagesRotationsNeymar MessiNo ratings yet
- Coordinate Systems: MW MW MW MW MWDocument4 pagesCoordinate Systems: MW MW MW MW MWSuresh NatarajanNo ratings yet
- 05 Instantaneous Axis of RotationDocument14 pages05 Instantaneous Axis of RotationSupriyo DuttaNo ratings yet
- Chapter Three Velocity AnalysisDocument57 pagesChapter Three Velocity Analysismekete mulualemNo ratings yet
- Robot Arms, Hands: Kinematics: With Slides From Renata MelamudDocument59 pagesRobot Arms, Hands: Kinematics: With Slides From Renata Melamudjose_balcazar89No ratings yet
- CG Cheat Sheet 2020Document6 pagesCG Cheat Sheet 2020Nitesh MalviyaNo ratings yet
- Forward Kinematics: February 4, 2016Document6 pagesForward Kinematics: February 4, 2016Kartik aminNo ratings yet
- RoboticsDocument10 pagesRoboticsjaiy12No ratings yet
- Kumbojkar Triple IntegralsDocument23 pagesKumbojkar Triple Integralsaditya.sschNo ratings yet
- PhotogrammetryDocument45 pagesPhotogrammetryValerie VictoriaNo ratings yet
- Chapter2 PDFDocument43 pagesChapter2 PDFBelayneh BirhanNo ratings yet
- Problem Set in High EnergyDocument2 pagesProblem Set in High EnergysachinNo ratings yet
- Lecture 1Document5 pagesLecture 1johnte vokeNo ratings yet
- Addis Ababa Science and Technology University (Aastu) Industrial Automation and Introduction To RoboticsDocument47 pagesAddis Ababa Science and Technology University (Aastu) Industrial Automation and Introduction To Roboticsbereketab mulugetaNo ratings yet
- Tensor Algebra: PH701/NITK/September 22, 2020Document6 pagesTensor Algebra: PH701/NITK/September 22, 2020Myself GamerNo ratings yet
- Pot 078Document7 pagesPot 078Zafer ÜnalNo ratings yet
- Game Engine Programming 2 Week 3 Module 3Document25 pagesGame Engine Programming 2 Week 3 Module 3Dean LevyNo ratings yet
- Lecture 4 MTH301Document7 pagesLecture 4 MTH301studentNo ratings yet
- Rotation and Angular Momentum: RotationsDocument20 pagesRotation and Angular Momentum: RotationsSayan RoyNo ratings yet
- Dynamics-Assigment 2Document16 pagesDynamics-Assigment 2imran5705074No ratings yet
- Non-Linear Strogatz 4Document4 pagesNon-Linear Strogatz 4Oscar CordobaNo ratings yet
- AMI 40 From175to186 PDFDocument12 pagesAMI 40 From175to186 PDFJagadeeshMadugulaNo ratings yet
- Chapter ObjectivesDocument24 pagesChapter ObjectivesArafat Hossain AkashNo ratings yet
- Cinemática I. Estudio de La PosiciónDocument20 pagesCinemática I. Estudio de La PosiciónJonathanIbarraCarbajalNo ratings yet
- SU (2) and SO (3) : 1 The Group of RotationsDocument5 pagesSU (2) and SO (3) : 1 The Group of RotationsmarioasensicollantesNo ratings yet
- Arbitary Rotation ProofDocument3 pagesArbitary Rotation Proofmohamed2010526No ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Sustainable Development Goal - 7Document14 pagesSustainable Development Goal - 7siamaeNo ratings yet
- Store, Retrieve Process: Database Management, Presentations, Games and MoreDocument3 pagesStore, Retrieve Process: Database Management, Presentations, Games and MoresiamaeNo ratings yet
- Observation: A) Anode Cathode Voltage of SR3 and Gate Voltage of SR4 of DC Switch Opening and ClosingDocument4 pagesObservation: A) Anode Cathode Voltage of SR3 and Gate Voltage of SR4 of DC Switch Opening and ClosingsiamaeNo ratings yet
- Assin 2Document6 pagesAssin 2siamaeNo ratings yet
- Pfister2008a ICEM Torque Measurement Methods For Very High Speed Synchronous Motors DownloadéDocument5 pagesPfister2008a ICEM Torque Measurement Methods For Very High Speed Synchronous Motors DownloadésiamaeNo ratings yet
- United States PatentDocument4 pagesUnited States PatentsiamaeNo ratings yet
- Draft Sorp (Ceb) - 27 May 2016Document220 pagesDraft Sorp (Ceb) - 27 May 2016siamaeNo ratings yet
- Pscad SimulationDocument4 pagesPscad SimulationsiamaeNo ratings yet
- Assignment 5 - Operation ManagementDocument1 pageAssignment 5 - Operation ManagementsiamaeNo ratings yet
- Underground Powerhouse Cavern and Transformer Cavern Excavation Process Has Been CompletedDocument3 pagesUnderground Powerhouse Cavern and Transformer Cavern Excavation Process Has Been CompletedsiamaeNo ratings yet
- Heat Load Calculation (Cold Storage Plant)Document3 pagesHeat Load Calculation (Cold Storage Plant)Kenny Graiven81% (26)
- Socrates Theory of PhilosophyDocument20 pagesSocrates Theory of PhilosophysiamaeNo ratings yet
- Assignment No. 01Document2 pagesAssignment No. 01siamaeNo ratings yet
- EE3001 - Advanced Measurements: Digital FiltersDocument38 pagesEE3001 - Advanced Measurements: Digital Filterssiamae100% (1)
- Course Development Plan General InformationDocument50 pagesCourse Development Plan General InformationsiamaeNo ratings yet
- Closed Loop DC MotorDocument6 pagesClosed Loop DC MotorsiamaeNo ratings yet
- Store, Retrieve Process: Database Management, Presentations, Games and MoreDocument3 pagesStore, Retrieve Process: Database Management, Presentations, Games and MoresiamaeNo ratings yet
- Tutorial 3: - LGSI Zee in Bending: Z 12 X 2.5 14g, F 50ksi - ObjectiveDocument11 pagesTutorial 3: - LGSI Zee in Bending: Z 12 X 2.5 14g, F 50ksi - ObjectivekhayatNo ratings yet
- VII EC - SyDocument11 pagesVII EC - SymohitNo ratings yet
- Compare and Contrast Essay Assignment Week 4 Coronavirus Versus Influenza GHead8538Document5 pagesCompare and Contrast Essay Assignment Week 4 Coronavirus Versus Influenza GHead8538iqbaloktavianNo ratings yet
- The Carpenters-This MasqueradeDocument1 pageThe Carpenters-This MasqueradeMaría GoldsteinNo ratings yet
- Spatial Neglect - Overview, Etiology, Mechanisms and Morbidities in Spatial NeglectDocument9 pagesSpatial Neglect - Overview, Etiology, Mechanisms and Morbidities in Spatial NeglectRivulet1No ratings yet
- A Taste of MurderDocument6 pagesA Taste of Murderjluis1980No ratings yet
- UNDERSTANDING AND DEVELOPING THE OBJECTIVES OF TRAINING and FACILITATION OF LEARNINGDocument23 pagesUNDERSTANDING AND DEVELOPING THE OBJECTIVES OF TRAINING and FACILITATION OF LEARNINGshweta_46664100% (3)
- Goli InfluencerTalkingPoints 20201106-USDocument5 pagesGoli InfluencerTalkingPoints 20201106-USOnline StoreNo ratings yet
- Home Life Among The Sangam Age v2Document104 pagesHome Life Among The Sangam Age v2Ravi SoniNo ratings yet
- Hugs in The City: Author: Milly Brouard Illustrators: JP Brouard, Kalynne VorsterDocument19 pagesHugs in The City: Author: Milly Brouard Illustrators: JP Brouard, Kalynne VorsterShalini MNo ratings yet
- Documento - MX Solucionario Administracioacuten de Operaciones 12va Edicion Chase Richard JacobsDocument10 pagesDocumento - MX Solucionario Administracioacuten de Operaciones 12va Edicion Chase Richard JacobsAnderson InsuastiNo ratings yet
- Prefinal Lesson2 Literary - DevicesDocument18 pagesPrefinal Lesson2 Literary - DevicesCarina Margallo CelajeNo ratings yet
- BSBCUS501 Content FileDocument175 pagesBSBCUS501 Content FileChirag GoyalNo ratings yet
- Understanding The Coping Strategies of Selected Filipinos Victimized by Typhoon Ondoy Across LifespanDocument17 pagesUnderstanding The Coping Strategies of Selected Filipinos Victimized by Typhoon Ondoy Across LifespanrxpturousNo ratings yet
- Okeefe Courtney Self-Care Final Eval Spring 2022Document7 pagesOkeefe Courtney Self-Care Final Eval Spring 2022api-606420000No ratings yet
- Implementing Smart FactoryDocument10 pagesImplementing Smart FactoryUcup VespaNo ratings yet
- AADocument238 pagesAAmarnekibNo ratings yet
- The Effect of Oral Care With Chlorhexidine PDFDocument7 pagesThe Effect of Oral Care With Chlorhexidine PDFALISSON DAYAN CHICA HERRERANo ratings yet
- CSD Step 1 Reading (Days 4-6)Document36 pagesCSD Step 1 Reading (Days 4-6)Jeff LacasandileNo ratings yet
- Chapter 6Document10 pagesChapter 6Rohish MehtaNo ratings yet
- Operations Management: Supplement 6 - Statistical Process ControlDocument73 pagesOperations Management: Supplement 6 - Statistical Process ControlShubham SharmaNo ratings yet
- Upheaval Buckling Assessment Based On Pipeline FeaturesDocument10 pagesUpheaval Buckling Assessment Based On Pipeline FeaturesabhmarsNo ratings yet
- IYCF Counselling Cards ChildFundPCADocument34 pagesIYCF Counselling Cards ChildFundPCAChris-Goldie LorezoNo ratings yet
- MacDonald - Augustine's Cognitive Voluntariam in de Trinitate 11Document10 pagesMacDonald - Augustine's Cognitive Voluntariam in de Trinitate 11Philipp TschirkNo ratings yet
- AAST-CC312-Fall 21-Lec 10Document21 pagesAAST-CC312-Fall 21-Lec 10youssef hossamNo ratings yet
- Letter of Invite For Gallery Walk Docents 2-22Document1 pageLetter of Invite For Gallery Walk Docents 2-22api-239016405No ratings yet
- Brain ImagingDocument14 pagesBrain ImagingSenal Malaka PremarathnaNo ratings yet
- Community Corrections Case StudyDocument5 pagesCommunity Corrections Case Studyapi-594892891No ratings yet
- The Entrepreneurial' Refugee in The Bazaars: Sindhi Migrants in Jaipur's Walled CityDocument15 pagesThe Entrepreneurial' Refugee in The Bazaars: Sindhi Migrants in Jaipur's Walled CityYash SoniNo ratings yet
- Actividad 2 Ingles 3Document4 pagesActividad 2 Ingles 3DaEn TorrenzNo ratings yet