Download as pdf or txt
You might also like
- Newton S Laws Ex1Document3 pagesNewton S Laws Ex1Ahmed ZakiNo ratings yet
- User Manual: Finite Element Models of Helmet Assessment Tools Version 1.0 For LS-DYNADocument35 pagesUser Manual: Finite Element Models of Helmet Assessment Tools Version 1.0 For LS-DYNAchoopoNo ratings yet
- UsersGuide deltaECDocument285 pagesUsersGuide deltaECHakan AteşNo ratings yet
- Design of A Hip Joint Simulator According To The ISO 14242: Nikolaos I. Galanis, Member, IAENG and Dimitrios E. ManolakosDocument6 pagesDesign of A Hip Joint Simulator According To The ISO 14242: Nikolaos I. Galanis, Member, IAENG and Dimitrios E. ManolakosJosé santanaNo ratings yet
- Ankle OrthosisDocument27 pagesAnkle OrthosisSwapnil MitraNo ratings yet
- Design and Control of A Parallel Robot For Ankle RehabilitationDocument14 pagesDesign and Control of A Parallel Robot For Ankle RehabilitationSushi RollNo ratings yet
- Project PPT - 171FA08049, 171FA08030Document66 pagesProject PPT - 171FA08049, 171FA08030Kamal TammaNo ratings yet
- Additive Manufacturing of Custom Orthoses and Prostheses - A ReviewDocument7 pagesAdditive Manufacturing of Custom Orthoses and Prostheses - A ReviewÖzgeSevinKeskinNo ratings yet
- Vibration Measurement and Analysis of knee-Ankle-Foot Orthosis (KAFO)Document32 pagesVibration Measurement and Analysis of knee-Ankle-Foot Orthosis (KAFO)marwan alobaidiNo ratings yet
- Robot-Assisted Ankle Rehabilitation For The Treatment of Drop Foot: A Case StudyDocument5 pagesRobot-Assisted Ankle Rehabilitation For The Treatment of Drop Foot: A Case StudyIhsanNo ratings yet
- Benemerito EDEMDocument10 pagesBenemerito EDEMIvan BenemeritoNo ratings yet
- 1 PBDocument11 pages1 PBalidina538No ratings yet
- Real-Time Knee Adduction Moment Feedback Training Using An Elliptical TrainerDocument10 pagesReal-Time Knee Adduction Moment Feedback Training Using An Elliptical TrainerSilvana AiadNo ratings yet
- Above Knee Prosthetic Limb ModelingDocument38 pagesAbove Knee Prosthetic Limb Modelingmarwan alobaidiNo ratings yet
- 1 s2.0 S2212827115004370 MainDocument6 pages1 s2.0 S2212827115004370 MainweronikaNo ratings yet
- ChopardDocument10 pagesChopardpascallindaNo ratings yet
- Motion Analysis and Postural Stability of Transtibial Prosthesis UsersDocument6 pagesMotion Analysis and Postural Stability of Transtibial Prosthesis UsersMady BuzeaNo ratings yet
- MechanismDocument12 pagesMechanismGERARDO TORRES RUIZNo ratings yet
- Application of Finite Element Analysis in DentistryDocument19 pagesApplication of Finite Element Analysis in Dentistryamericana91No ratings yet
- Powered Ankle Exoskeletons Existent Designs and Control SystemsDocument8 pagesPowered Ankle Exoskeletons Existent Designs and Control SystemsHeeralNo ratings yet
- A Preclinical Method For Evaluating The Kinematics - 2019 - Medical EngineeringDocument7 pagesA Preclinical Method For Evaluating The Kinematics - 2019 - Medical EngineeringEzgi PelitNo ratings yet
- SMAFO: Stiffness Modulated Ankle Foot Orthosis For A Patient With Foot DropDocument6 pagesSMAFO: Stiffness Modulated Ankle Foot Orthosis For A Patient With Foot DropIhsanNo ratings yet
- Footstep Classification Methodology Using Piezoelectric Sensors Embedded in InsoleDocument8 pagesFootstep Classification Methodology Using Piezoelectric Sensors Embedded in InsoleIJAERS JOURNALNo ratings yet
- Hayashi 2012Document4 pagesHayashi 2012ehabjawherNo ratings yet
- Artigo TrabDocument19 pagesArtigo Trabluanslopes.deckNo ratings yet
- Journal of Biomechanics: Emily H. Sinitski, Andrew H. Hansen, Jason M. WilkenDocument8 pagesJournal of Biomechanics: Emily H. Sinitski, Andrew H. Hansen, Jason M. WilkenJoel OntiverosNo ratings yet
- Total Knee Replacement Wear DuringDocument8 pagesTotal Knee Replacement Wear DuringRob GNNo ratings yet
- ICRA 2019 Design of A Soft Ankle Foot Orthosis Exosuit For Foot Drop AssistanceDocument8 pagesICRA 2019 Design of A Soft Ankle Foot Orthosis Exosuit For Foot Drop AssistanceeyaoNo ratings yet
- Analisis Aktuator Pada Assistive Dan Rehabilitation DeviceDocument15 pagesAnalisis Aktuator Pada Assistive Dan Rehabilitation DeviceIhsanNo ratings yet
- Estimation of Two Wear Factors For Total Hip ArthrDocument8 pagesEstimation of Two Wear Factors For Total Hip ArthrMauricio MoncadaNo ratings yet
- PengDocument10 pagesPengBarath NMNo ratings yet
- Biomechanics of Forearm Rotation: Force and Efficiency of Pronator TeresDocument9 pagesBiomechanics of Forearm Rotation: Force and Efficiency of Pronator Teresengr_faheemNo ratings yet
- Journal of Biomechanics: Josh R. Baxter, Todd J. Hullfish, Wen ChaoDocument5 pagesJournal of Biomechanics: Josh R. Baxter, Todd J. Hullfish, Wen ChaoEma.diazNo ratings yet
- Medical Engineering and Physics: Nguiadem Clautilde, Raison Maxime, Achiche SofianeDocument10 pagesMedical Engineering and Physics: Nguiadem Clautilde, Raison Maxime, Achiche SofianeMatthew PhillipsNo ratings yet
- 0.an Intact Fibula May Contribute To Allow Early Weight Bearing in Surgically Treated Tibial Plateau Fractures.Document6 pages0.an Intact Fibula May Contribute To Allow Early Weight Bearing in Surgically Treated Tibial Plateau Fractures.lliuyueeNo ratings yet
- Prosthetics and Orthotics InternationalDocument8 pagesProsthetics and Orthotics InternationalFelipe ReyesNo ratings yet
- Protesis 12Document7 pagesProtesis 12ana márquezNo ratings yet
- STLR 2Document11 pagesSTLR 2Ahmed TawfiqNo ratings yet
- Applied Sciences: Gait Kinematics Analysis of Flatfoot AdultsDocument11 pagesApplied Sciences: Gait Kinematics Analysis of Flatfoot AdultsdhirenNo ratings yet
- Project PPT - 171FA08049, 171FA08030Document61 pagesProject PPT - 171FA08049, 171FA08030Kamal TammaNo ratings yet
- A Soft Wearable Robotic Ankle-Foot-Orthosis For Post-Stroke PatientsDocument6 pagesA Soft Wearable Robotic Ankle-Foot-Orthosis For Post-Stroke PatientsIsabella Garcia DiazNo ratings yet
- Design and Control of A Lower Limb Exoskeleton For Robot-Assisted Gait TrainingDocument16 pagesDesign and Control of A Lower Limb Exoskeleton For Robot-Assisted Gait TrainingYalçın SabihaNo ratings yet
- Protesis 1Document6 pagesProtesis 1ana márquezNo ratings yet
- Finite-Element Analysis To Determine Effect of MonDocument20 pagesFinite-Element Analysis To Determine Effect of MonRufaida HussainNo ratings yet
- High Tibial Osteotomy For Osteoarthritis of The KneeDocument6 pagesHigh Tibial Osteotomy For Osteoarthritis of The Kneealyek92No ratings yet
- A New Carbon Fibre Spring Orthosis For Children With Cerebral Palsy 2007Document5 pagesA New Carbon Fibre Spring Orthosis For Children With Cerebral Palsy 2007josep ignasiNo ratings yet
- A Review Study For Measurement, Analysis and Evaluation Four Bar Polycentric KneeDocument18 pagesA Review Study For Measurement, Analysis and Evaluation Four Bar Polycentric Kneejosephe.thrasherNo ratings yet
- Ankle-Foot Orthosis Made by 3D Printing TechniqueDocument7 pagesAnkle-Foot Orthosis Made by 3D Printing Techniquejose diazNo ratings yet
- Kuo2010 Article BiomechanicalAnalysisOfTheLumbDocument13 pagesKuo2010 Article BiomechanicalAnalysisOfTheLumbchristian sanchezNo ratings yet
- Abdul - Rahman - 2021 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 1096 - 012002Document11 pagesAbdul - Rahman - 2021 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 1096 - 012002Pul50No ratings yet
- Robot-Aided Neurorehabilitation: A Novel Robot For Ankle RehabilitationDocument15 pagesRobot-Aided Neurorehabilitation: A Novel Robot For Ankle RehabilitationabcNo ratings yet
- The Application of Supra - Malleolar Orthosis (SMO) in Iraq: Design and Fabrication ApproachDocument13 pagesThe Application of Supra - Malleolar Orthosis (SMO) in Iraq: Design and Fabrication ApproachucssNo ratings yet
- Design and Optimization of An Index Finger Exoskeleton With Semi-Wrapped Fixtures and Series Elastic ActuatorsDocument10 pagesDesign and Optimization of An Index Finger Exoskeleton With Semi-Wrapped Fixtures and Series Elastic ActuatorsمحمدNo ratings yet
- Computational Foot Modeling - Scope and ApplicationsDocument28 pagesComputational Foot Modeling - Scope and ApplicationsalexNo ratings yet
- 2 Dof Ankle FootDocument20 pages2 Dof Ankle FootMustafa Oğuz DALNo ratings yet
- Mechanical Design of A Distal Arm Exoskeleton For Stroke and Spinal Cord Injury RehabilitationDocument5 pagesMechanical Design of A Distal Arm Exoskeleton For Stroke and Spinal Cord Injury RehabilitationOmar CirineoNo ratings yet
- Protesis 13Document9 pagesProtesis 13ana márquezNo ratings yet
- Robotics: A Review On Design of Upper Limb ExoskeletonsDocument35 pagesRobotics: A Review On Design of Upper Limb ExoskeletonsCostinel BogheanuNo ratings yet
- Robotics: A Review On Design of Upper Limb ExoskeletonsDocument35 pagesRobotics: A Review On Design of Upper Limb ExoskeletonsDerekNo ratings yet
- Yang 2018 J. Phys. Conf. Ser. 1087 062004Document7 pagesYang 2018 J. Phys. Conf. Ser. 1087 062004Jayakrishnan P SNo ratings yet
- Characterization of Ankle Function During Stair Ambulation: D.H. Gates, J. Lelas, U. Della Croce, H. Herr, P. BonatoDocument4 pagesCharacterization of Ankle Function During Stair Ambulation: D.H. Gates, J. Lelas, U. Della Croce, H. Herr, P. BonatoIbrahim ImamNo ratings yet
- Souit 2016Document6 pagesSouit 2016Arun KumarNo ratings yet
- Orthodontically Driven Corticotomy: Tissue Engineering to Enhance Orthodontic and Multidisciplinary TreatmentFrom EverandOrthodontically Driven Corticotomy: Tissue Engineering to Enhance Orthodontic and Multidisciplinary TreatmentFederico BrugnamiNo ratings yet
- Riley2013 Foot Kinematics and Loading of Professional Athletes in AmericanDocument7 pagesRiley2013 Foot Kinematics and Loading of Professional Athletes in AmericanchoopoNo ratings yet
- Biofabrication and Tissue Engineering: Insight SeriesDocument13 pagesBiofabrication and Tissue Engineering: Insight SerieschoopoNo ratings yet
- Manual 2017 Vicis Zero1 Helmet Model v1.0-1Document34 pagesManual 2017 Vicis Zero1 Helmet Model v1.0-1choopoNo ratings yet
- Manual 2016 Riddell Revolution Classic Helmet Model v1.0Document32 pagesManual 2016 Riddell Revolution Classic Helmet Model v1.0choopoNo ratings yet
- Structural EfficiencyDocument5 pagesStructural EfficiencychoopoNo ratings yet
- Time 4 ResearchpresentationslidesDocument66 pagesTime 4 ResearchpresentationslideschoopoNo ratings yet
- Grant Opportunity GuidelinesDocument26 pagesGrant Opportunity GuidelineschoopoNo ratings yet
- Australian Engineering Education Facts - Update October 2018Document2 pagesAustralian Engineering Education Facts - Update October 2018choopoNo ratings yet
- Dakota White, Kyle Perry CEA A-Day P.MDocument6 pagesDakota White, Kyle Perry CEA A-Day P.MchoopoNo ratings yet
- Wearable ExoDocument1 pageWearable ExochoopoNo ratings yet
- Jim 2018 0001Document5 pagesJim 2018 0001choopoNo ratings yet
- Sls Materials Guide: Duraform® Ex & Prox® Ex BlackDocument1 pageSls Materials Guide: Duraform® Ex & Prox® Ex BlackchoopoNo ratings yet
- Simpleware, Anybody & Ansys: Case StudyDocument2 pagesSimpleware, Anybody & Ansys: Case StudychoopoNo ratings yet
- Determining A Prony Series For A Viscoelastic Material From Time Varying Strain DataDocument26 pagesDetermining A Prony Series For A Viscoelastic Material From Time Varying Strain DatachoopoNo ratings yet
- Nine Principles For Design For The Developing World As Derived From The Engineering LiteratureDocument15 pagesNine Principles For Design For The Developing World As Derived From The Engineering LiteraturechoopoNo ratings yet
- Implementation of A Finite Element Model For Gear Stress Analysis Based On Tie-Surface Constraints and Its Validation Through The Hertz's TheoryDocument13 pagesImplementation of A Finite Element Model For Gear Stress Analysis Based On Tie-Surface Constraints and Its Validation Through The Hertz's TheorychoopoNo ratings yet
- Rating Insufficient: CES Reliability AssessmentDocument3 pagesRating Insufficient: CES Reliability AssessmentchoopoNo ratings yet
- As1548 Pt46onrlo l20 August2010bDocument3 pagesAs1548 Pt46onrlo l20 August2010bchoopoNo ratings yet
- Role of Helmet in The Mechanics of Shock Wave Propagation Under Blast Loading ConditionsDocument13 pagesRole of Helmet in The Mechanics of Shock Wave Propagation Under Blast Loading ConditionschoopoNo ratings yet
- ZZ - Introduction To Lorentz Geometry Curves and Surfaces by Alexandre Lymberopoulos and Ivo Terek CoutoDocument351 pagesZZ - Introduction To Lorentz Geometry Curves and Surfaces by Alexandre Lymberopoulos and Ivo Terek Coutorajesh kumarNo ratings yet
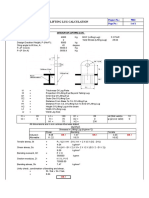
- Lifting Lug - Skid - 2018.07.16Document4 pagesLifting Lug - Skid - 2018.07.16RaghNo ratings yet
- 5.2 General Chemistry 1. Module Lesson 5Document14 pages5.2 General Chemistry 1. Module Lesson 5Francesca BarolaNo ratings yet
- Detailed Lesson Plan in Science 10 For DemoDocument7 pagesDetailed Lesson Plan in Science 10 For DemoSylvs Enong100% (2)
- Solid State Physics For Electronics1Document9 pagesSolid State Physics For Electronics1elius2138726No ratings yet
- DS 0023 Rev A 1499145Document3 pagesDS 0023 Rev A 1499145ANo ratings yet
- Basics in Mineral Processing-Introduction1Document9 pagesBasics in Mineral Processing-Introduction1makedo33100% (1)
- Class 12 Physics ProjectDocument8 pagesClass 12 Physics ProjectManaswini JhaNo ratings yet
- CE Board Nov 2020 - Differential Calculus - Set 3Document2 pagesCE Board Nov 2020 - Differential Calculus - Set 3Mark Lester LualhatiNo ratings yet
- Micronor Manual Mr221-Mr222Document27 pagesMicronor Manual Mr221-Mr222aizzi1989No ratings yet
- Cold Pilger Rolling - Part One - KEY To METALS ArticleDocument3 pagesCold Pilger Rolling - Part One - KEY To METALS Articlekumarpankaj030No ratings yet
- Interpretasi CitraDocument19 pagesInterpretasi CitraNabil Amirul HaqNo ratings yet
- Thoshiba Power TransformerDocument28 pagesThoshiba Power TransformerSERGIO_MANNo ratings yet
- CFD Analysis of Centrifugal Pump ImpelleDocument9 pagesCFD Analysis of Centrifugal Pump Impelleبلال بن عميرهNo ratings yet
- A Dielectric Lens Antenna With Enhanced Aperture Efficiency For Industrial Radar ApplicationsDocument3 pagesA Dielectric Lens Antenna With Enhanced Aperture Efficiency For Industrial Radar ApplicationsacademicosNo ratings yet
- Bearing Capacity of Model Footings ON SandDocument47 pagesBearing Capacity of Model Footings ON SandAjayan VoNo ratings yet
- MSP Drillex BOP AnularDocument21 pagesMSP Drillex BOP AnularDavid GonzalezNo ratings yet
- Semi-Finished PC Polarized Lens (Index of Refraction: 1.523)Document22 pagesSemi-Finished PC Polarized Lens (Index of Refraction: 1.523)api-3749285No ratings yet
- Tools Required: ObjectiveDocument2 pagesTools Required: ObjectiveRahul KarthikNo ratings yet
- Telecom Italia Open Access Telecom Italia Lab SirtiDocument26 pagesTelecom Italia Open Access Telecom Italia Lab SirtiquikeblazNo ratings yet
- AIIMS MBBS Entrance Examination 2004 Solved Question PaperDocument36 pagesAIIMS MBBS Entrance Examination 2004 Solved Question PaperAditya GoelNo ratings yet
- FRASER 1999 - What Are Discourse MarkersDocument22 pagesFRASER 1999 - What Are Discourse Markersrverano1983No ratings yet
- CSL 730: Parallel Programming: OpenmpDocument74 pagesCSL 730: Parallel Programming: OpenmpDaengTattoNo ratings yet
- Notes On Fibre Reinforced ConcreteDocument9 pagesNotes On Fibre Reinforced ConcreteK.ANISH100% (1)
- 11.2英文说明书 AP05 AP06 AP07 AP08 Plasma gel maker PDFDocument13 pages11.2英文说明书 AP05 AP06 AP07 AP08 Plasma gel maker PDFdanielNo ratings yet
- Chapter 7 Gases: 7.3 Pressure and Volume (Boyle's Law)Document19 pagesChapter 7 Gases: 7.3 Pressure and Volume (Boyle's Law)Mary JewelNo ratings yet
- Energy Efficient ArchitectureDocument22 pagesEnergy Efficient ArchitectureKakoli0% (1)
- Chapter 12Document6 pagesChapter 12Looyee ChenNo ratings yet