
Intelligent Parallel Parking and Obstacle Avoidance System: Spring 2011 Senior Design Project
Intelligent Parallel Parking and Obstacle Avoidance System: Spring 2011 Senior Design Project
You might also like
- Assetto Corsa Touge Setup GuideDocument4 pagesAssetto Corsa Touge Setup Guideethanjoyce68100% (1)
- Great Plains Parts Manual 1200, 1210, 1220, 1500, 1510, 1520, 2000, 2010 & 2020Document218 pagesGreat Plains Parts Manual 1200, 1210, 1220, 1500, 1510, 1520, 2000, 2010 & 2020a04205No ratings yet
- Dau Terminal AnalysisDocument49 pagesDau Terminal AnalysisMila Zulueta100% (2)
- LPT 709 Parts ListDocument289 pagesLPT 709 Parts ListvipulNo ratings yet
- Samjungtech Parking PDFDocument14 pagesSamjungtech Parking PDFwillyNo ratings yet
- A Semi-Automated Parallel Parking System For Passenger Cars: J PohlDocument13 pagesA Semi-Automated Parallel Parking System For Passenger Cars: J PohlAlexandru IlincaNo ratings yet
- DSP-EL PresentationDocument19 pagesDSP-EL PresentationAditi BardhanNo ratings yet
- SR No Reseach Work Conclusion Name of Author Year of PublicationDocument2 pagesSR No Reseach Work Conclusion Name of Author Year of PublicationtomyNo ratings yet
- Autonomous Self-Parking RobotDocument10 pagesAutonomous Self-Parking RobotTsion NegussieNo ratings yet
- Robot FireDocument5 pagesRobot FireAmirulFarisNo ratings yet
- Automatic Multilevel Car Parking & Controlling System Using PLCDocument3 pagesAutomatic Multilevel Car Parking & Controlling System Using PLCAnonymous kw8Yrp0R5r0% (1)
- An Introduction To Plug-and-Play Motion SubsystemsDocument5 pagesAn Introduction To Plug-and-Play Motion SubsystemsIlija BozovicNo ratings yet
- Vertical Car ParkingDocument5 pagesVertical Car ParkingTanvi Khurana0% (1)
- Sara Van An 2009Document3 pagesSara Van An 2009Arjun JayaprakasNo ratings yet
- 0 ReviewDocument10 pages0 ReviewKural ArasanNo ratings yet
- Presentation IoTDocument21 pagesPresentation IoTMuhammad HamzihNo ratings yet
- Car Parking Space CounterDocument5 pagesCar Parking Space CounterAjith Kumar M100% (1)
- ICSE2018 Rethink EE Architecture in Automotive To Facilitate Automation Connectivity and Electro Mobility 5Document11 pagesICSE2018 Rethink EE Architecture in Automotive To Facilitate Automation Connectivity and Electro Mobility 5Shivaji Bhausaheb ThoratNo ratings yet
- Automatic Headlamp Steering System: Rajesh.GDocument5 pagesAutomatic Headlamp Steering System: Rajesh.GAbhyudayNo ratings yet
- UntitledhdusisDocument15 pagesUntitledhdusisSlim AgentNo ratings yet
- Autonomous Driving Developed With An FPGA DesignDocument4 pagesAutonomous Driving Developed With An FPGA Designrahul rNo ratings yet
- Robotics Challenge Proposal - TEAM NITRO_7, REVA University - IISc ARTPARKDocument10 pagesRobotics Challenge Proposal - TEAM NITRO_7, REVA University - IISc ARTPARKamarkaratagi.sfalNo ratings yet
- Android Based Advanced Car Lifting System Using Bluetooth: August 2017Document6 pagesAndroid Based Advanced Car Lifting System Using Bluetooth: August 2017Just4 FuntechNo ratings yet
- Multi Parking System Fional Project ReportDocument54 pagesMulti Parking System Fional Project ReportVinay MuleyNo ratings yet
- Microcontroller Based Automatic Parking SystemDocument5 pagesMicrocontroller Based Automatic Parking SystemOLivSitanggangNo ratings yet
- B.Tech Final Year Project On AUTONOMOUS PARALLEL PARKING RC CARDocument11 pagesB.Tech Final Year Project On AUTONOMOUS PARALLEL PARKING RC CARMohammad Tarique Mumtaz100% (1)
- Drive by WireDocument4 pagesDrive by WireanishmohantcrNo ratings yet
- Automated Guided Vehicle With Scissor Lifting Mechanism Using Arduino INO ProgramDocument3 pagesAutomated Guided Vehicle With Scissor Lifting Mechanism Using Arduino INO ProgramInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- IJSTEV2I10004Document6 pagesIJSTEV2I10004Bitthal ParidaNo ratings yet
- Electric Vehicle Wireless Charging Technology On The GoDocument4 pagesElectric Vehicle Wireless Charging Technology On The GoSourav DuttaNo ratings yet
- Robust Yaw Stability Controller Design and Hardware-in-the-Loop Testing For A Road VehicleDocument17 pagesRobust Yaw Stability Controller Design and Hardware-in-the-Loop Testing For A Road Vehiclekishor sahuNo ratings yet
- As Systemmappe Servolectric E Lowres 20150513Document18 pagesAs Systemmappe Servolectric E Lowres 20150513Ahmed SamNo ratings yet
- Co-Simulation of Energy Management Strategy For Hybrid Electric Vehicle in Avl InmotionDocument6 pagesCo-Simulation of Energy Management Strategy For Hybrid Electric Vehicle in Avl InmotionConfidential SinghNo ratings yet
- BoglitchDocument19 pagesBoglitchAgnidipta BasuNo ratings yet
- Line Following RobotDocument5 pagesLine Following RobotsathishNo ratings yet
- Autonomous Car Using Embedded SystemDocument12 pagesAutonomous Car Using Embedded Systemkiran vemulaNo ratings yet
- Pick and Place Robotic Arm: Guided By: Prof. J. N. PathanDocument15 pagesPick and Place Robotic Arm: Guided By: Prof. J. N. PathanPraveen MathiasNo ratings yet
- Servo MotorDocument8 pagesServo MotorEng.Theyazen Al-dubibiNo ratings yet
- RACE Vault Product BrochureDocument17 pagesRACE Vault Product BrochureAbhilashBetanamudiNo ratings yet
- Design and Fabrication of Automobile Reverse Locking Differential MechanismDocument83 pagesDesign and Fabrication of Automobile Reverse Locking Differential MechanismPraveen MathiasNo ratings yet
- ZigbeeDocument37 pagesZigbeeSana AdreesNo ratings yet
- Design and Analysis of Multi Story (G+4) Parking Using Staad-Pro SoftwareDocument5 pagesDesign and Analysis of Multi Story (G+4) Parking Using Staad-Pro SoftwareRishika DixitNo ratings yet
- Universal Power Automatic JackDocument4 pagesUniversal Power Automatic JackSenthilraj Sarangapani100% (1)
- 4 Ujf J&pages 1&min SRC Count 5Document1 page4 Ujf J&pages 1&min SRC Count 5Siyyadula Chandra SekharNo ratings yet
- A Seminar Report ON: Sensor Based Automated CarDocument12 pagesA Seminar Report ON: Sensor Based Automated CarWARRIOR GamingNo ratings yet
- Assad - Dissertation Final PDFDocument20 pagesAssad - Dissertation Final PDFamal roshanNo ratings yet
- Design and Development of Automated Parking Slot: March 2014Document3 pagesDesign and Development of Automated Parking Slot: March 2014Zahara175No ratings yet
- Ai For AutomotivesDocument18 pagesAi For AutomotivesAbhishek SoundaleNo ratings yet
- ABE - EV Chargers - POCO ModelDocument14 pagesABE - EV Chargers - POCO ModelOm ChavanNo ratings yet
- Autonomous Scale Vehicles FOR Road Tracking AND Obstacle AvoidanceDocument8 pagesAutonomous Scale Vehicles FOR Road Tracking AND Obstacle AvoidanceCHAMBITANo ratings yet
- Car Parking With 90° RotationDocument10 pagesCar Parking With 90° RotationIJRASETPublicationsNo ratings yet
- Wada 2013Document4 pagesWada 2013ezhilarasi ezhilarsiNo ratings yet
- Simulation and Real Time Implementation of Motor Controller For 3ph Induction Motor Using MATLAB and dSPACEDocument11 pagesSimulation and Real Time Implementation of Motor Controller For 3ph Induction Motor Using MATLAB and dSPACEShubham PatilNo ratings yet
- A Seminar Report ON: Sensor Based Automated CarDocument12 pagesA Seminar Report ON: Sensor Based Automated CarWARRIOR GamingNo ratings yet
- RACE Vault Product BrochureDocument16 pagesRACE Vault Product BrochureShitanshuNo ratings yet
- Adaptive Head Lamp SystemDocument22 pagesAdaptive Head Lamp SystemAkshay bypNo ratings yet
- PLC Based Multilevel Automatic Car Parking System: Ijireeice IjireeiceDocument3 pagesPLC Based Multilevel Automatic Car Parking System: Ijireeice IjireeiceAliNo ratings yet
- Intelligent Car Parking SystemDocument8 pagesIntelligent Car Parking SystemLeo BoyNo ratings yet
- AbstractDocument2 pagesAbstractchdev007No ratings yet
- Using Exit Time Predictions To Optimize Self Automated Parking LotsDocument6 pagesUsing Exit Time Predictions To Optimize Self Automated Parking LotsOtrebor ZenchasNo ratings yet
- LDRDocument19 pagesLDRAnonymous qh5UUGTNo ratings yet
- Smart Adaptive Vehicle Lighting System: ISSN (PRINT) : 2393-8374, (ONLINE) : 2394-0697, VOLUME-4, ISSUE-8, 2017Document7 pagesSmart Adaptive Vehicle Lighting System: ISSN (PRINT) : 2393-8374, (ONLINE) : 2394-0697, VOLUME-4, ISSUE-8, 2017Mohan RNo ratings yet
- Design and Development of Anti-Roll Back Mechanism: V. D. Kolate, R. R. Kurup, A. M. LatakeDocument4 pagesDesign and Development of Anti-Roll Back Mechanism: V. D. Kolate, R. R. Kurup, A. M. LatakePreeti BhamreNo ratings yet
- 6 Carburator Si Kituri de ReparatieDocument5 pages6 Carburator Si Kituri de ReparatieSerban NicolaeNo ratings yet
- Manual Q8Document320 pagesManual Q8Кирилл ИлюшинNo ratings yet
- Entry LIST Speed Test 2 LEBANONDocument2 pagesEntry LIST Speed Test 2 LEBANONnicolashindiNo ratings yet
- Boq No. Particulars Unit BOQ QTY Basic Rate Basic AmountDocument18 pagesBoq No. Particulars Unit BOQ QTY Basic Rate Basic AmountmanojNo ratings yet
- Owner's Handbook Peugeot 505Document97 pagesOwner's Handbook Peugeot 505luki yuspitaNo ratings yet
- A4af A4bfDocument23 pagesA4af A4bfjuan valderramaNo ratings yet
- SSP - 464 The Amarok - Powertrain and Drive ConceptDocument60 pagesSSP - 464 The Amarok - Powertrain and Drive ConceptwurtukukNo ratings yet
- Motor Graders: Engine 120K2 140K2Document6 pagesMotor Graders: Engine 120K2 140K2Akhilesh SinghNo ratings yet
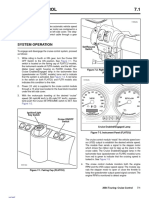
- Cruise Control 7.1: GeneralDocument22 pagesCruise Control 7.1: Generaljose fermin carrozaNo ratings yet
- 1.1 The Project Proponent: EIA GSJ at Pont Fer / Jumbo / Dowlut Roundabouts May 2017 M191/GSJ/3.1Document6 pages1.1 The Project Proponent: EIA GSJ at Pont Fer / Jumbo / Dowlut Roundabouts May 2017 M191/GSJ/3.1Hrithik IGNo ratings yet
- Dok Bike Bed 16 3213412 en Om Sen Aepi v1Document198 pagesDok Bike Bed 16 3213412 en Om Sen Aepi v1lantapanNo ratings yet
- Cylinder Head Part Numbers - ASET™ EnginesDocument2 pagesCylinder Head Part Numbers - ASET™ EnginesHamilton MirandaNo ratings yet
- Mort&H, MSRDC, Mumbai, Maharashtra Schedules To AgreementDocument6 pagesMort&H, MSRDC, Mumbai, Maharashtra Schedules To AgreementAkshay PendurkarNo ratings yet
- 2017 Renault Clio 104255Document260 pages2017 Renault Clio 104255IngvaldNilsen-NygaardNo ratings yet
- 1 Engine: Error Codes Engine, DescritionDocument12 pages1 Engine: Error Codes Engine, DescritionHAINo ratings yet
- Rear Axle: (Cu1 2 3 TON Series)Document44 pagesRear Axle: (Cu1 2 3 TON Series)Brayan NohNo ratings yet
- FS (O) 10309 Es (O) 1X409 AngDocument2 pagesFS (O) 10309 Es (O) 1X409 AngAnGel AmayaNo ratings yet
- Stadler Kiss DD SBBDocument2 pagesStadler Kiss DD SBBRodrigo Sampaio100% (1)
- Re Spare PartsDocument81 pagesRe Spare Partssubham jaiswalNo ratings yet
- Prices Effective Dated December 01 2013Document41 pagesPrices Effective Dated December 01 2013Ayyaz ShadNo ratings yet
- Railway Budget 2010Document8 pagesRailway Budget 2010jubin654No ratings yet
- Otani 2022Document10 pagesOtani 2022Humbie EspejoNo ratings yet
- Vehicles in The Town TravellingDocument3 pagesVehicles in The Town TravellingD GNo ratings yet
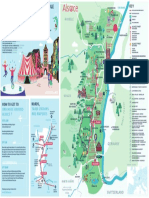
- Touristic Map Alsace Carte Touristique 2018Document1 pageTouristic Map Alsace Carte Touristique 2018Randy GongNo ratings yet
- Study On Platform Gap Fillers For Indian RailwaysDocument3 pagesStudy On Platform Gap Fillers For Indian Railwaysshubham bisaneNo ratings yet
- Suzuki SJ413a PDFDocument4 pagesSuzuki SJ413a PDFRahadi IskandarNo ratings yet
























































































Download as doc, pdf, or txt
You might also like
- Assetto Corsa Touge Setup GuideDocument4 pagesAssetto Corsa Touge Setup Guideethanjoyce68100% (1)
- Great Plains Parts Manual 1200, 1210, 1220, 1500, 1510, 1520, 2000, 2010 & 2020Document218 pagesGreat Plains Parts Manual 1200, 1210, 1220, 1500, 1510, 1520, 2000, 2010 & 2020a04205No ratings yet
- Dau Terminal AnalysisDocument49 pagesDau Terminal AnalysisMila Zulueta100% (2)
- LPT 709 Parts ListDocument289 pagesLPT 709 Parts ListvipulNo ratings yet
- Samjungtech Parking PDFDocument14 pagesSamjungtech Parking PDFwillyNo ratings yet
- A Semi-Automated Parallel Parking System For Passenger Cars: J PohlDocument13 pagesA Semi-Automated Parallel Parking System For Passenger Cars: J PohlAlexandru IlincaNo ratings yet
- DSP-EL PresentationDocument19 pagesDSP-EL PresentationAditi BardhanNo ratings yet
- SR No Reseach Work Conclusion Name of Author Year of PublicationDocument2 pagesSR No Reseach Work Conclusion Name of Author Year of PublicationtomyNo ratings yet
- Autonomous Self-Parking RobotDocument10 pagesAutonomous Self-Parking RobotTsion NegussieNo ratings yet
- Robot FireDocument5 pagesRobot FireAmirulFarisNo ratings yet
- Automatic Multilevel Car Parking & Controlling System Using PLCDocument3 pagesAutomatic Multilevel Car Parking & Controlling System Using PLCAnonymous kw8Yrp0R5r0% (1)
- An Introduction To Plug-and-Play Motion SubsystemsDocument5 pagesAn Introduction To Plug-and-Play Motion SubsystemsIlija BozovicNo ratings yet
- Vertical Car ParkingDocument5 pagesVertical Car ParkingTanvi Khurana0% (1)
- Sara Van An 2009Document3 pagesSara Van An 2009Arjun JayaprakasNo ratings yet
- 0 ReviewDocument10 pages0 ReviewKural ArasanNo ratings yet
- Presentation IoTDocument21 pagesPresentation IoTMuhammad HamzihNo ratings yet
- Car Parking Space CounterDocument5 pagesCar Parking Space CounterAjith Kumar M100% (1)
- ICSE2018 Rethink EE Architecture in Automotive To Facilitate Automation Connectivity and Electro Mobility 5Document11 pagesICSE2018 Rethink EE Architecture in Automotive To Facilitate Automation Connectivity and Electro Mobility 5Shivaji Bhausaheb ThoratNo ratings yet
- Automatic Headlamp Steering System: Rajesh.GDocument5 pagesAutomatic Headlamp Steering System: Rajesh.GAbhyudayNo ratings yet
- UntitledhdusisDocument15 pagesUntitledhdusisSlim AgentNo ratings yet
- Autonomous Driving Developed With An FPGA DesignDocument4 pagesAutonomous Driving Developed With An FPGA Designrahul rNo ratings yet
- Robotics Challenge Proposal - TEAM NITRO_7, REVA University - IISc ARTPARKDocument10 pagesRobotics Challenge Proposal - TEAM NITRO_7, REVA University - IISc ARTPARKamarkaratagi.sfalNo ratings yet
- Android Based Advanced Car Lifting System Using Bluetooth: August 2017Document6 pagesAndroid Based Advanced Car Lifting System Using Bluetooth: August 2017Just4 FuntechNo ratings yet
- Multi Parking System Fional Project ReportDocument54 pagesMulti Parking System Fional Project ReportVinay MuleyNo ratings yet
- Microcontroller Based Automatic Parking SystemDocument5 pagesMicrocontroller Based Automatic Parking SystemOLivSitanggangNo ratings yet
- B.Tech Final Year Project On AUTONOMOUS PARALLEL PARKING RC CARDocument11 pagesB.Tech Final Year Project On AUTONOMOUS PARALLEL PARKING RC CARMohammad Tarique Mumtaz100% (1)
- Drive by WireDocument4 pagesDrive by WireanishmohantcrNo ratings yet
- Automated Guided Vehicle With Scissor Lifting Mechanism Using Arduino INO ProgramDocument3 pagesAutomated Guided Vehicle With Scissor Lifting Mechanism Using Arduino INO ProgramInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- IJSTEV2I10004Document6 pagesIJSTEV2I10004Bitthal ParidaNo ratings yet
- Electric Vehicle Wireless Charging Technology On The GoDocument4 pagesElectric Vehicle Wireless Charging Technology On The GoSourav DuttaNo ratings yet
- Robust Yaw Stability Controller Design and Hardware-in-the-Loop Testing For A Road VehicleDocument17 pagesRobust Yaw Stability Controller Design and Hardware-in-the-Loop Testing For A Road Vehiclekishor sahuNo ratings yet
- As Systemmappe Servolectric E Lowres 20150513Document18 pagesAs Systemmappe Servolectric E Lowres 20150513Ahmed SamNo ratings yet
- Co-Simulation of Energy Management Strategy For Hybrid Electric Vehicle in Avl InmotionDocument6 pagesCo-Simulation of Energy Management Strategy For Hybrid Electric Vehicle in Avl InmotionConfidential SinghNo ratings yet
- BoglitchDocument19 pagesBoglitchAgnidipta BasuNo ratings yet
- Line Following RobotDocument5 pagesLine Following RobotsathishNo ratings yet
- Autonomous Car Using Embedded SystemDocument12 pagesAutonomous Car Using Embedded Systemkiran vemulaNo ratings yet
- Pick and Place Robotic Arm: Guided By: Prof. J. N. PathanDocument15 pagesPick and Place Robotic Arm: Guided By: Prof. J. N. PathanPraveen MathiasNo ratings yet
- Servo MotorDocument8 pagesServo MotorEng.Theyazen Al-dubibiNo ratings yet
- RACE Vault Product BrochureDocument17 pagesRACE Vault Product BrochureAbhilashBetanamudiNo ratings yet
- Design and Fabrication of Automobile Reverse Locking Differential MechanismDocument83 pagesDesign and Fabrication of Automobile Reverse Locking Differential MechanismPraveen MathiasNo ratings yet
- ZigbeeDocument37 pagesZigbeeSana AdreesNo ratings yet
- Design and Analysis of Multi Story (G+4) Parking Using Staad-Pro SoftwareDocument5 pagesDesign and Analysis of Multi Story (G+4) Parking Using Staad-Pro SoftwareRishika DixitNo ratings yet
- Universal Power Automatic JackDocument4 pagesUniversal Power Automatic JackSenthilraj Sarangapani100% (1)
- 4 Ujf J&pages 1&min SRC Count 5Document1 page4 Ujf J&pages 1&min SRC Count 5Siyyadula Chandra SekharNo ratings yet
- A Seminar Report ON: Sensor Based Automated CarDocument12 pagesA Seminar Report ON: Sensor Based Automated CarWARRIOR GamingNo ratings yet
- Assad - Dissertation Final PDFDocument20 pagesAssad - Dissertation Final PDFamal roshanNo ratings yet
- Design and Development of Automated Parking Slot: March 2014Document3 pagesDesign and Development of Automated Parking Slot: March 2014Zahara175No ratings yet
- Ai For AutomotivesDocument18 pagesAi For AutomotivesAbhishek SoundaleNo ratings yet
- ABE - EV Chargers - POCO ModelDocument14 pagesABE - EV Chargers - POCO ModelOm ChavanNo ratings yet
- Autonomous Scale Vehicles FOR Road Tracking AND Obstacle AvoidanceDocument8 pagesAutonomous Scale Vehicles FOR Road Tracking AND Obstacle AvoidanceCHAMBITANo ratings yet
- Car Parking With 90° RotationDocument10 pagesCar Parking With 90° RotationIJRASETPublicationsNo ratings yet
- Wada 2013Document4 pagesWada 2013ezhilarasi ezhilarsiNo ratings yet
- Simulation and Real Time Implementation of Motor Controller For 3ph Induction Motor Using MATLAB and dSPACEDocument11 pagesSimulation and Real Time Implementation of Motor Controller For 3ph Induction Motor Using MATLAB and dSPACEShubham PatilNo ratings yet
- A Seminar Report ON: Sensor Based Automated CarDocument12 pagesA Seminar Report ON: Sensor Based Automated CarWARRIOR GamingNo ratings yet
- RACE Vault Product BrochureDocument16 pagesRACE Vault Product BrochureShitanshuNo ratings yet
- Adaptive Head Lamp SystemDocument22 pagesAdaptive Head Lamp SystemAkshay bypNo ratings yet
- PLC Based Multilevel Automatic Car Parking System: Ijireeice IjireeiceDocument3 pagesPLC Based Multilevel Automatic Car Parking System: Ijireeice IjireeiceAliNo ratings yet
- Intelligent Car Parking SystemDocument8 pagesIntelligent Car Parking SystemLeo BoyNo ratings yet
- AbstractDocument2 pagesAbstractchdev007No ratings yet
- Using Exit Time Predictions To Optimize Self Automated Parking LotsDocument6 pagesUsing Exit Time Predictions To Optimize Self Automated Parking LotsOtrebor ZenchasNo ratings yet
- LDRDocument19 pagesLDRAnonymous qh5UUGTNo ratings yet
- Smart Adaptive Vehicle Lighting System: ISSN (PRINT) : 2393-8374, (ONLINE) : 2394-0697, VOLUME-4, ISSUE-8, 2017Document7 pagesSmart Adaptive Vehicle Lighting System: ISSN (PRINT) : 2393-8374, (ONLINE) : 2394-0697, VOLUME-4, ISSUE-8, 2017Mohan RNo ratings yet
- Design and Development of Anti-Roll Back Mechanism: V. D. Kolate, R. R. Kurup, A. M. LatakeDocument4 pagesDesign and Development of Anti-Roll Back Mechanism: V. D. Kolate, R. R. Kurup, A. M. LatakePreeti BhamreNo ratings yet
- 6 Carburator Si Kituri de ReparatieDocument5 pages6 Carburator Si Kituri de ReparatieSerban NicolaeNo ratings yet
- Manual Q8Document320 pagesManual Q8Кирилл ИлюшинNo ratings yet
- Entry LIST Speed Test 2 LEBANONDocument2 pagesEntry LIST Speed Test 2 LEBANONnicolashindiNo ratings yet
- Boq No. Particulars Unit BOQ QTY Basic Rate Basic AmountDocument18 pagesBoq No. Particulars Unit BOQ QTY Basic Rate Basic AmountmanojNo ratings yet
- Owner's Handbook Peugeot 505Document97 pagesOwner's Handbook Peugeot 505luki yuspitaNo ratings yet
- A4af A4bfDocument23 pagesA4af A4bfjuan valderramaNo ratings yet
- SSP - 464 The Amarok - Powertrain and Drive ConceptDocument60 pagesSSP - 464 The Amarok - Powertrain and Drive ConceptwurtukukNo ratings yet
- Motor Graders: Engine 120K2 140K2Document6 pagesMotor Graders: Engine 120K2 140K2Akhilesh SinghNo ratings yet
- Cruise Control 7.1: GeneralDocument22 pagesCruise Control 7.1: Generaljose fermin carrozaNo ratings yet
- 1.1 The Project Proponent: EIA GSJ at Pont Fer / Jumbo / Dowlut Roundabouts May 2017 M191/GSJ/3.1Document6 pages1.1 The Project Proponent: EIA GSJ at Pont Fer / Jumbo / Dowlut Roundabouts May 2017 M191/GSJ/3.1Hrithik IGNo ratings yet
- Dok Bike Bed 16 3213412 en Om Sen Aepi v1Document198 pagesDok Bike Bed 16 3213412 en Om Sen Aepi v1lantapanNo ratings yet
- Cylinder Head Part Numbers - ASET™ EnginesDocument2 pagesCylinder Head Part Numbers - ASET™ EnginesHamilton MirandaNo ratings yet
- Mort&H, MSRDC, Mumbai, Maharashtra Schedules To AgreementDocument6 pagesMort&H, MSRDC, Mumbai, Maharashtra Schedules To AgreementAkshay PendurkarNo ratings yet
- 2017 Renault Clio 104255Document260 pages2017 Renault Clio 104255IngvaldNilsen-NygaardNo ratings yet
- 1 Engine: Error Codes Engine, DescritionDocument12 pages1 Engine: Error Codes Engine, DescritionHAINo ratings yet
- Rear Axle: (Cu1 2 3 TON Series)Document44 pagesRear Axle: (Cu1 2 3 TON Series)Brayan NohNo ratings yet
- FS (O) 10309 Es (O) 1X409 AngDocument2 pagesFS (O) 10309 Es (O) 1X409 AngAnGel AmayaNo ratings yet
- Stadler Kiss DD SBBDocument2 pagesStadler Kiss DD SBBRodrigo Sampaio100% (1)
- Re Spare PartsDocument81 pagesRe Spare Partssubham jaiswalNo ratings yet
- Prices Effective Dated December 01 2013Document41 pagesPrices Effective Dated December 01 2013Ayyaz ShadNo ratings yet
- Railway Budget 2010Document8 pagesRailway Budget 2010jubin654No ratings yet
- Otani 2022Document10 pagesOtani 2022Humbie EspejoNo ratings yet
- Vehicles in The Town TravellingDocument3 pagesVehicles in The Town TravellingD GNo ratings yet
- Touristic Map Alsace Carte Touristique 2018Document1 pageTouristic Map Alsace Carte Touristique 2018Randy GongNo ratings yet
- Study On Platform Gap Fillers For Indian RailwaysDocument3 pagesStudy On Platform Gap Fillers For Indian Railwaysshubham bisaneNo ratings yet
- Suzuki SJ413a PDFDocument4 pagesSuzuki SJ413a PDFRahadi IskandarNo ratings yet