Download as pdf or txt
You might also like
- Metal & Stone - 56 - 110 - Einleitung - ENDocument5 pagesMetal & Stone - 56 - 110 - Einleitung - ENlotus630No ratings yet
- B.tech SRM SyllabusDocument82 pagesB.tech SRM Syllabussanthosh5242100% (1)
- Conceptual Selling OverviewDocument2 pagesConceptual Selling OverviewAlexandra BuradaNo ratings yet
- M.tech in Communications-24.01.2019Document50 pagesM.tech in Communications-24.01.2019raykoustav145No ratings yet
- Mechanical Engineering Detailed SyllabusDocument26 pagesMechanical Engineering Detailed Syllabushikal987No ratings yet
- ME Proposed 3rd Year Syllabus 21.03.12Document48 pagesME Proposed 3rd Year Syllabus 21.03.12Dhruv ChoudharyNo ratings yet
- Nanotechnology: Curriculum For The M.Tech. Programme inDocument49 pagesNanotechnology: Curriculum For The M.Tech. Programme inselva.natarajNo ratings yet
- Syllabus For B.Tech (Automobile Engineering) Up To Fourth YearDocument40 pagesSyllabus For B.Tech (Automobile Engineering) Up To Fourth YearAshwani AnandNo ratings yet
- MTech ECE (Communication) Comm Detail Syllabus 2014 2Document24 pagesMTech ECE (Communication) Comm Detail Syllabus 2014 2Dr Sunipa RoyNo ratings yet
- Department of Mechanical EngineeringDocument21 pagesDepartment of Mechanical EngineeringTekeshwer kaushikNo ratings yet
- Gas Dynamics and Jet Propulsion-Jit CollegeDocument210 pagesGas Dynamics and Jet Propulsion-Jit CollegeJogarao BikkavoluNo ratings yet
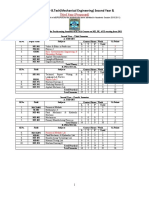
- Corrected Final Year Btech Mech Syllabus Effective 2014-15Document43 pagesCorrected Final Year Btech Mech Syllabus Effective 2014-15Bhushan RaneNo ratings yet
- SyllabusDocument107 pagesSyllabusKonda SumanayanaNo ratings yet
- Btech SYLLABUSDocument99 pagesBtech SYLLABUSsushree ankitaNo ratings yet
- 2021 Mechatronics CurriculumDocument5 pages2021 Mechatronics CurriculumGalaxy AtomNo ratings yet
- 180 Credits B.tech-MechDocument135 pages180 Credits B.tech-MechAlag EswaranNo ratings yet
- 3rd Sem PDFDocument12 pages3rd Sem PDFHItesh PatreNo ratings yet
- UG B-Tech-Structure-NEP-2020-Proposed 2023-24 - Mech PrsentationDocument3 pagesUG B-Tech-Structure-NEP-2020-Proposed 2023-24 - Mech PrsentationSalokhaRaj RedevelopmentNo ratings yet
- Iv Semester Branch/Course Civil EngineeringDocument28 pagesIv Semester Branch/Course Civil EngineeringAbhishek KumarNo ratings yet
- BTech 4th SemNewSyllabus 1 69Document69 pagesBTech 4th SemNewSyllabus 1 69Raju Kumar 20cs42No ratings yet
- 4th Sem Syllabus 2019Document81 pages4th Sem Syllabus 2019MithuNo ratings yet
- Electronics & Instrumentation EngineeringDocument137 pagesElectronics & Instrumentation EngineeringCooldude69No ratings yet
- Course Structure For Electronics Computer Sc. EnggDocument4 pagesCourse Structure For Electronics Computer Sc. EnggSenjuti KhanraNo ratings yet
- BTechCSE 2016-2020 V3Document117 pagesBTechCSE 2016-2020 V3pulakrajpadhaiNo ratings yet
- Marine Syllabus Upto 4th Year Syllabus 20.05.13Document51 pagesMarine Syllabus Upto 4th Year Syllabus 20.05.13sudinorange100% (1)
- M.E. EstDocument22 pagesM.E. EstDelphin RoseNo ratings yet
- Power Engineering SyllabusDocument79 pagesPower Engineering SyllabuspapudasNo ratings yet
- Electronics & Telecommunication EngineeringDocument136 pagesElectronics & Telecommunication Engineeringneelguitar13No ratings yet
- ECE Curriculum EssentialDocument105 pagesECE Curriculum EssentialAkashdeep BhattacharjeeNo ratings yet
- BTechCSE16 20Document168 pagesBTechCSE16 20James StarkNo ratings yet
- BSC PCM First YearDocument34 pagesBSC PCM First Yearbalad92538No ratings yet
- M Tech Curricullam & Syllabus R2018Document60 pagesM Tech Curricullam & Syllabus R2018Goutham Mareeswaran BNo ratings yet
- ECE (2022) 5th Sem SyllabusDocument31 pagesECE (2022) 5th Sem SyllabusYaman VermaNo ratings yet
- Electronics and Computer Science EngineeringDocument147 pagesElectronics and Computer Science EngineeringAniket ShuklaNo ratings yet
- UG - Syllabus - 2010 - 11Document33 pagesUG - Syllabus - 2010 - 11RAJANo ratings yet
- M.TechComputerUnitWise 4Document28 pagesM.TechComputerUnitWise 4PrathmeshNo ratings yet
- M techComputerNewDocument23 pagesM techComputerNewArvind KiwelekarNo ratings yet
- AEIE Proposed 2nd Year Syllabus-15.12.11Document24 pagesAEIE Proposed 2nd Year Syllabus-15.12.11susamayNo ratings yet
- UG Mech Syllabus 2011 12Document64 pagesUG Mech Syllabus 2011 12VDNo ratings yet
- IT BTechDocument136 pagesIT BTechBhaswar RoyNo ratings yet
- BTech - EEE - Course Structure - 3-8 SemDocument6 pagesBTech - EEE - Course Structure - 3-8 SemRamish HashmiNo ratings yet
- Tezpur University BTech (Mechanical Engineering) Syllabus FDocument41 pagesTezpur University BTech (Mechanical Engineering) Syllabus FRajkamal ChoudharyNo ratings yet
- BTech CSBS UG Curriculam - 1st Yr Syllabus 2023 OnwardsDocument36 pagesBTech CSBS UG Curriculam - 1st Yr Syllabus 2023 OnwardsUPANGSHU BASAKNo ratings yet
- Revised 2012 B.E. Ist SemesterDocument12 pagesRevised 2012 B.E. Ist SemesterDr Abhijeet GangulyNo ratings yet
- B. Tech. Energy Curriculum & SyllabusDocument142 pagesB. Tech. Energy Curriculum & SyllabusDr LokeshaNo ratings yet
- M.Tech ThermalDocument44 pagesM.Tech ThermalDr. G. C. Vishnu Kumar Assistant Professor III - AERONo ratings yet
- 2018 2022 Computer Science EngeeringDocument125 pages2018 2022 Computer Science EngeeringDaksh DevanshNo ratings yet
- 6 Semester: SL - No Category of Course Code No Course Title Credits Marks Total Contact Hours Per Week L PDocument12 pages6 Semester: SL - No Category of Course Code No Course Title Credits Marks Total Contact Hours Per Week L PDebeshNo ratings yet
- B.tech SyllabusDocument52 pagesB.tech SyllabusSk Taharot AliNo ratings yet
- 1st Year Sllybus CSE)Document24 pages1st Year Sllybus CSE)RahulNo ratings yet
- MTech Structural Engineering SyllabusDocument9 pagesMTech Structural Engineering SyllabusAdaitaChowdhuryNo ratings yet
- SRM University B.Tech ECE Syllabus PDFDocument102 pagesSRM University B.Tech ECE Syllabus PDFshruthiNo ratings yet
- B.tech Mechanical (AY2018 2019)Document220 pagesB.tech Mechanical (AY2018 2019)kedar pathak0% (1)
- TC Syllabus OverallDocument158 pagesTC Syllabus OverallVaishnavi SrinathNo ratings yet
- Course Structure For B.Tech in Electronics and Electrical EngineeringDocument12 pagesCourse Structure For B.Tech in Electronics and Electrical EngineeringAbir DeyNo ratings yet
- R18 B.Tech - .Mechanical Engg - Syllabus IV YearDocument32 pagesR18 B.Tech - .Mechanical Engg - Syllabus IV YearCharan CherryNo ratings yet
- Btech CSEDocument125 pagesBtech CSEFaizNo ratings yet
- Uncertainty in Industrial Practice: A Guide to Quantitative Uncertainty ManagementFrom EverandUncertainty in Industrial Practice: A Guide to Quantitative Uncertainty ManagementNo ratings yet
- Electrical & Electronic Measurements Model Curriculum 2020-21Document1 pageElectrical & Electronic Measurements Model Curriculum 2020-21devi ji0% (1)
- NAS Model Curriculum 2019-20Document1 pageNAS Model Curriculum 2019-20devi jiNo ratings yet
- B.Tech. 2nelectronic Devices Model Curriculum 2019-20 PDFDocument1 pageB.Tech. 2nelectronic Devices Model Curriculum 2019-20 PDFdevi jiNo ratings yet
- Electrical & Electronic Measurements Model Curriculum 2020-21Document1 pageElectrical & Electronic Measurements Model Curriculum 2020-21devi ji0% (1)
- Sensor & Instrumentation 2nd Year 2019-20Document2 pagesSensor & Instrumentation 2nd Year 2019-20devi ji33% (3)
- Name: Designation: Professor/Associate Professor/Assistant ProfessorDocument1 pageName: Designation: Professor/Associate Professor/Assistant Professordevi jiNo ratings yet
- Tutorial 15 - How To Interpret An Eye Diagram: Fig 1 - Eye Opening, What It MeansDocument2 pagesTutorial 15 - How To Interpret An Eye Diagram: Fig 1 - Eye Opening, What It Meansdevi jiNo ratings yet
- Language FunctionDocument23 pagesLanguage FunctionRestu AnnisaNo ratings yet
- Principles of Mine Haul Road Design and ConstructionDocument133 pagesPrinciples of Mine Haul Road Design and ConstructionRoger Thompson100% (1)
- Antonio, Christine ODocument3 pagesAntonio, Christine OChristine AntonioNo ratings yet
- Chapter 4 Supplement: Acceptance SamplingDocument15 pagesChapter 4 Supplement: Acceptance SamplingPradeepNo ratings yet
- 1) Contract DocumentsDocument146 pages1) Contract DocumentsFathyNo ratings yet
- Class NoteDocument33 pagesClass NoteAnshuman MukherjeeNo ratings yet
- Preparation and Attempt in Accordance To IPCDocument11 pagesPreparation and Attempt in Accordance To IPCpratikminj100% (5)
- FLIR A325sc DatasheetDocument2 pagesFLIR A325sc Datasheetlegato13No ratings yet
- Assessment Plan ShilohDocument2 pagesAssessment Plan Shilohapi-478596695No ratings yet
- Ora Laboratory Manual: Section 4 Section 4Document78 pagesOra Laboratory Manual: Section 4 Section 4Joanna Mae Masigan DacanayNo ratings yet
- The Passport To Success 9 Module 1Document18 pagesThe Passport To Success 9 Module 1gina100% (1)
- Master Bio Medical Engineering Guide Aug 09Document41 pagesMaster Bio Medical Engineering Guide Aug 09amirophobiaNo ratings yet
- Military Leadership C/ - Emalin Pilotos 0830H-0930H StrengthDocument21 pagesMilitary Leadership C/ - Emalin Pilotos 0830H-0930H StrengthAliyah CasinNo ratings yet
- T TestHandout2009Document18 pagesT TestHandout2009Anindita PalNo ratings yet
- Idle TimeDocument17 pagesIdle TimeBhasaar65No ratings yet
- Physics Notes PDF For Class 9Document3 pagesPhysics Notes PDF For Class 9Mithilesh Kr Prem100% (1)
- Bsba MMDocument2 pagesBsba MMKarem PalmesNo ratings yet
- Conference 2014 ProgrammeDocument10 pagesConference 2014 ProgrammeJessica WordenNo ratings yet
- CPE ListeningDocument3 pagesCPE ListeningThảo My NguyễnNo ratings yet
- Fys EngelskDocument79 pagesFys EngelskGeorge ErdicNo ratings yet
- TR Beauty Care Services (Nail Care) NC IIDocument58 pagesTR Beauty Care Services (Nail Care) NC IILeah TallaNo ratings yet
- The Value of An Archaeological Open-Air Museum Is in Its Use - Understanding Archaeological Open-Air Museums and Their Visitors (PDFDrive)Document347 pagesThe Value of An Archaeological Open-Air Museum Is in Its Use - Understanding Archaeological Open-Air Museums and Their Visitors (PDFDrive)Aarathi LakshmipathyNo ratings yet
- FS 4 Episode 1Document6 pagesFS 4 Episode 1Ivy Rasonable100% (1)
- Lesson1 Hiv PDFDocument53 pagesLesson1 Hiv PDFSambili TonnyNo ratings yet
- The Power of You in YouTube TubeBuddy HEYcom v22Document42 pagesThe Power of You in YouTube TubeBuddy HEYcom v22julianvgagnon100% (1)
- Arav Kundli PDFDocument54 pagesArav Kundli PDFSufer dance StudioNo ratings yet
- FK76M E LoresDocument18 pagesFK76M E LoresFRANCONo ratings yet